(54; МАНИПУЛЯТОР

| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор модульного типа | 1983 |
|
SU1263521A1 |
| Манипулятор | 1983 |
|
SU1093540A1 |
| Манипулятор внутрикамерный | 2021 |
|
RU2785920C1 |
| Манипулятор | 1987 |
|
SU1657369A1 |
| МАНИПУЛЯТОР | 1991 |
|
RU2022769C1 |
| Манипулятор | 1981 |
|
SU960006A1 |
| Модуль манипулятора | 1986 |
|
SU1423366A1 |
| Модуль манипулятора | 1985 |
|
SU1329962A1 |
| МАНИПУЛЯТОР | 1991 |
|
RU2022784C1 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО ГИДРОМАНИПУЛЯТОРА | 1998 |
|
RU2157787C2 |
Изобретение относится к машиностроению, а именно к средствам автоматизации технологических процессов.
Известен манипулятор, состоящий из неподвижной и подвижных сооснэ расположенных труб, снабженных дельньми винтовыми механизмами, кинематически связанных между собой, в котором обеспечивается одновременное выдвижение всех подвижных :труб 1 .
К недостаткам данной конструкции следует отнести усложнение конструкции при увеличении.числа подвижных труб, так как количество винтов равно количеству подвижных труб, прьчем винт,ы, связанные с подвижной трубой второго и выше порядка должны быть снабжены своими телескопическими трубами, связанными через шлицевое соединение, поэтому использование более двух подвижных труб для данной конструкции не целесообразно. Одновременное выдвижение всех подвижных труб уменьшает время подъёма, однако во столько же раз снижается точность позиционирования.
Также известен манипулятор, содержащий вертикальную стойку, установленную на основании и связанную
с приводами вращения и вертикального перемещения, а также механическую руку с захватом, установленную на 5 стойке и связанную с приводом вращения, выдвигаемое звено которой, в свою очередь, связано через винтовой механизм с приводом горизонтального перемещения 2.
Недостатком известного манипулятс«10ра является малая зона обслуживания.
Цель изобретения - увеличение технологических возможностей путем увеличения зоны обслуживания и уменьшения габаритов.
15
Поставленная цель достигается тем, что телескопическая вертикальная стойка снабжена дополнительным винтовым механизмом, при этом винтоjf. вые механизмы вертикальной стойки и механической руки выполнены телескопическими из нескольких звеньев, причем каждое звено кроме последнего, является гайкой для последующего, при этом первое звено каждого винто25вого механизма связано с приводом перемещения, а последнее - соответственно с последним звеном вертикальной стойки и механической руки.
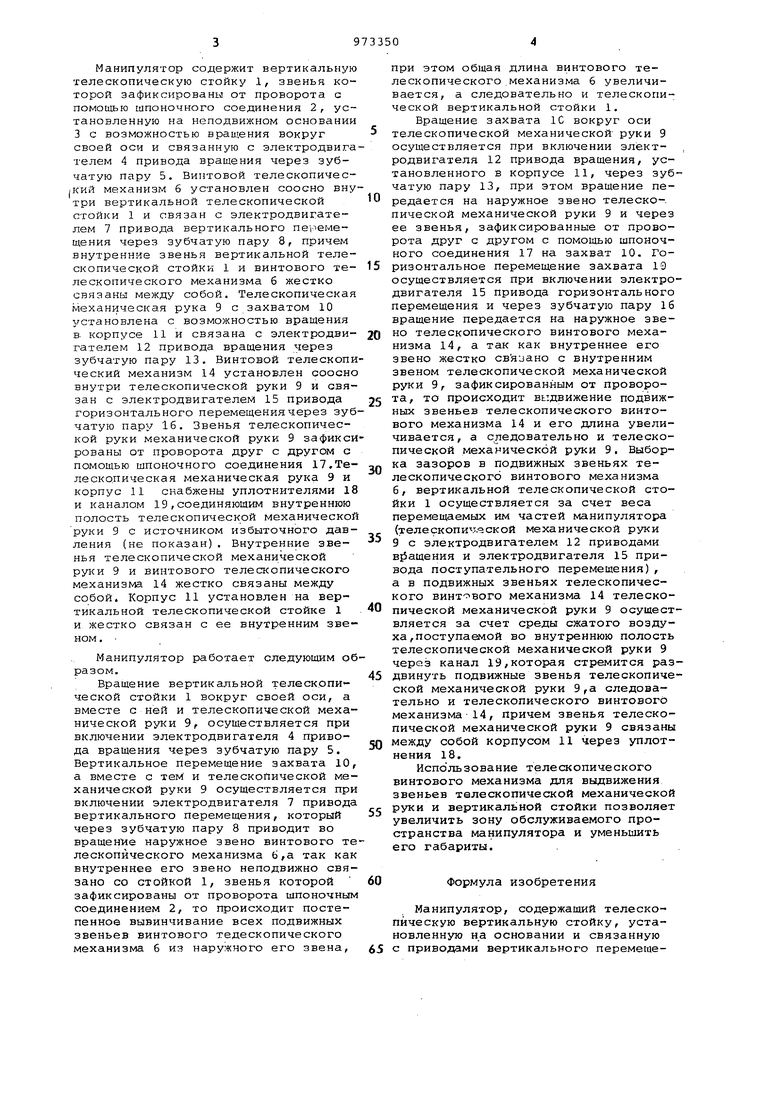
На фиг. 1 изображен манипулятор;
30 на фиг. 2 - разрез А-А на фиг.1.
Манипулятор содержит вертикальную телескопическую стойку 1, звенья которой зафиксированы от проворота с помощью шпоночного соединения 2, установленную на неподвижном основании 3 с возможностью вращения вокруг своей оси и связанную с электродвигателем 4 привода вращения через зубчатую пару 5. Винтовой телескопичес|Кий механизм б установлен соосно внутри вертикальной телескопической стойки 1 и связан с электродвигателем 7 привода вертикального nev sMeщения через зубчатую пару 8, причем внутренние звенья вертикальной телескопической стойки 1 и винтового телескопического механизма б жестко связаны между собой. Телескопическая механическая рука 9 с захватом 10 установлена с возможностью вращения в корпусе 11 и связана с электродвигателем 12 привода вращения через зубчатую пару 13. Винтовой телескопический механизм 14 установлен соосно внутри телескопической руки 9 и связан с электродвигателем 15 привода горизонтального перемещения через зубчатую пару 16. Звенья телескопической руки механической руки 9 зафиксированы от проворота друг с другом с помощью шпоночного соединения 17.Телескопическая механическая рука 9 и корпус 11 снабжены уплотнителями 18 и каналом 19,соединяющим внутреннюю полость телескопической механической руки 9 с источником избыточного давления (не показан). Внутренние звенья телескопической механической руки 9 и винтового телескопического механизма 14 жестко связаны между собой. Корпус 11 установлен на вертикальной телескопической стойке 1 и жестко связан с ее внутренним зве ном.
Манипулятор работает следующим образом.
Вращение вертикальной телескопической стойки 1 вокруг своей оси, а вместе с ней и телескопической механической руки 9, осуществляется при включении электродвигателя 4 привода вращения через зубчатую пару 5. Вертикальное перемещение захвата 10, а вместе с тем и телескопической механической руки 9 осуществляется при включении электродвигателя 7 привода вертикального перемещения, который через зубчатую пару 8 приводит во вращение наружное звено винтового телескопического механизма Ь,а так как внутреннее его звено неподвижно связано со стойкой 1, звенья которой зафиксированы от проворота шпоночным соединением 2, то происходит постепенное вывинчивание всех подвижных звеньев винтового тедескопического механизма 6 из наружного его звена.
при этом общая длина винтового телескопического .механизма б увеличивается, а следовательно и телескопической вертикальной стойки 1.
Вращение захвата 1C вокруг оси телескопической механической руки 9 осуществляется при включении электродвигателя 12 привода вращения, установленного в корпусе 11, через зубчатую пару 13, при этом вращение передается на наружное звено телеско-. пической механической руки 9 и через ее звенья, зафиксированные от проворота друг с другом с помощью шпоночного соединения 17 на захват 10. Горизонтальное перемещение захвата 10 осуществляется при включении электродвигателя 15 привода горизонтального перемещения и через зубчатую пару 16 вращение передается на наружное звено телескопического винтового механизма 14, а так как внутреннее его звено жестко свяиано с внутренним звеном телескопической механической руки 9, зафиксированным от проворота, то происходит выдвижение подвижных звеньев телескопического винтового механизма 14 и его длина увеличивается, а следовательно и телескопической механической руки 9, Выборка зазоров в подвижных звеньях телескопического винтового механизма б, вертикальной телескопической стойки 1 осуществляется за счет веса перемещаемых им частей манипулятора (телескопи .эсксй механической руки 9 с электродвигателем 12 приводами В15ащения и электродвигателя 15 привода поступательного перемещения), а в подвижных звеньях телескопического винт вого механизма 14 телескопической механической руки 9 осуществляется за счет среды сжатого воздуха ,поступаемой во внутреннюю полость телескопической механической руки 9 через канал 19,которая стремится раздвинуть подвижные звенья телескопической механической руки 9,а следовательно и телескопического винтового механизма 14, причем звенья телескопической механической руки 9 связаны между собой корпусом И через уплотнения 18.
Использование телескопического винтового механизма для выдвижения звеньев телескопичесжой механической руки и вертикальной стойки позволяет увеличить зону обслуживаемого пространства манипулятора и уменьшить его габариты.
Формула изобретения
Манипулятор, содержащий телескопическую вертикальную стойку, установленную на основании и связанную с приводами вертикального перемеще
