(54) ТРЕНАЖЕР ОПЕРАТОРА ГРУЗОПОДЪЕМНЫХ УСТРОЙСТВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажер оператора грузоподъемных устройств | 1977 |
|
SU750550A1 |
| Тренажер оператора | 1983 |
|
SU1098024A1 |
| Тренажер оператора | 1983 |
|
SU1191930A2 |
| Тренажер буровика | 1982 |
|
SU1062760A1 |
| Адаптивный тренажер оператора | 1982 |
|
SU1086451A2 |
| Устройство для обучения и контроля совместной работы операторов | 1985 |
|
SU1345235A1 |
| Тренажер оператора | 1984 |
|
SU1174960A2 |
| Тренажер операторов систем управления | 1982 |
|
SU1053132A1 |
| Устройство для обучения операторов грузоподъемных машин | 1982 |
|
SU1035635A1 |
| Тренажер операторов грузоподъемных устройств | 1981 |
|
SU964702A1 |
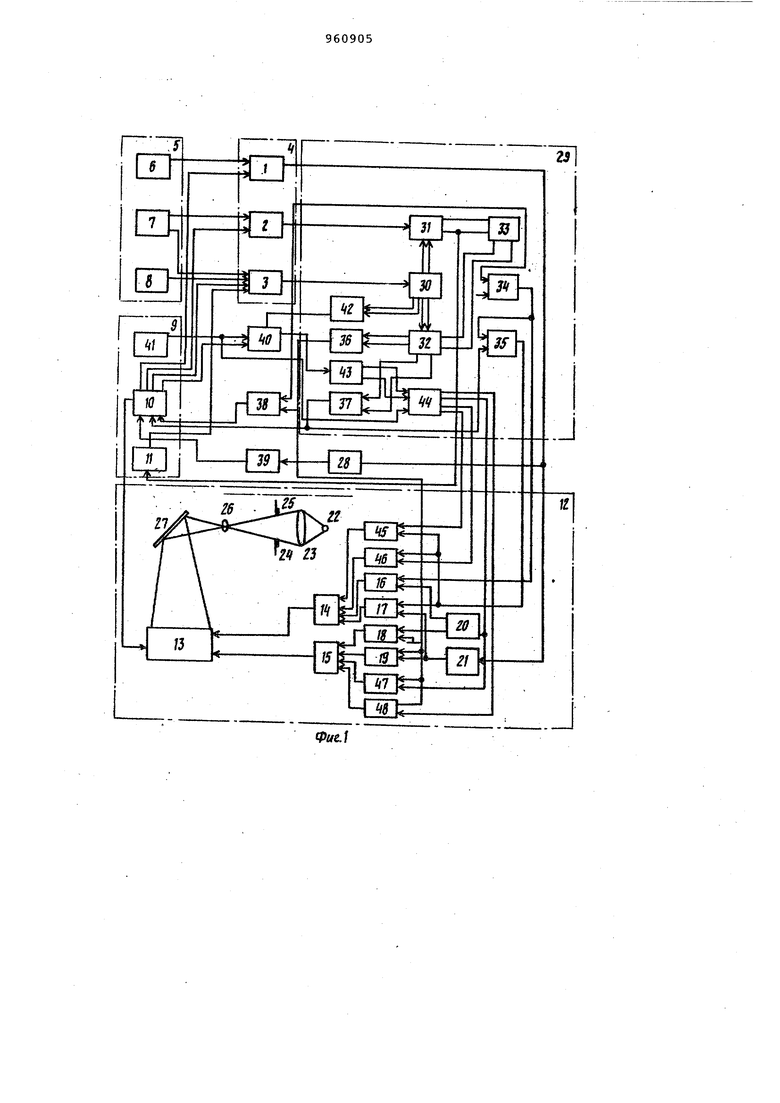
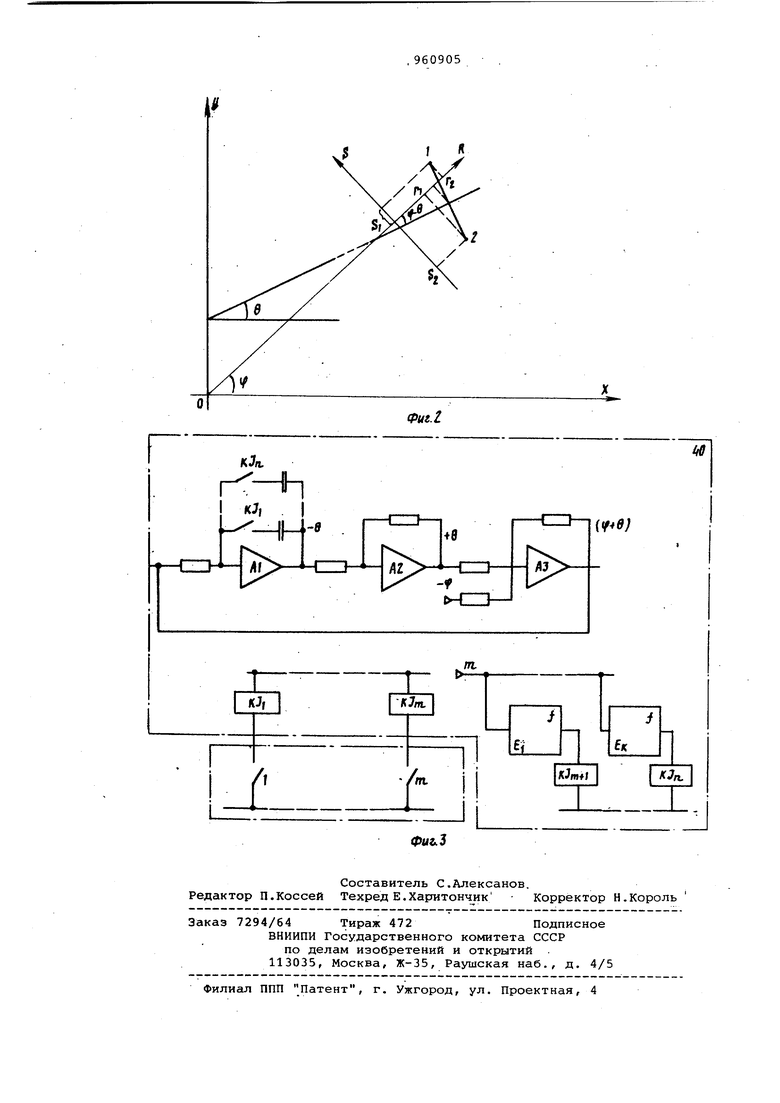
Изобретение относится к тренажерам I операторов грузоподъемных устройств и может быть использовано при профессиональной подготовке операторов гру зоподъемных устройств и систем управ ления. Известен тренажер оператора грузо подъемных устройств, содержащий имитатЬр управления грузоподъемным устройством, который соединен с блоком управления и блоком задания эталонов который имеет узел задания массы гру за, интегральный преобразователь (Координат, имеющий узел интегрирования поворота грузоподъемного устройства, который подключен к имитатору управления грузоподъемным устройством и блоку отображения информации 1 . Недостатком известного тренажера является невысокая эффективность тренажа . Цель изобретения - повышение эффективности тренажа. Поставленная цель достигается тем что в тренажере оператора грузоподъем (Ных устройств, содержащем имитатор уп управления грузоподъемным устройством который соединен с блоком управления и блоком задания эталонов,, который |имеет узел задания массы груза, ийтегральный преобразователь координат, имеющий узел интегрирования поворота грузоподъемного устройства, который подключен к имитатору управления грузоподъемным устройством и к блоку отображения информации, блок задания эталонов снабжен узлом задания габаритов груза, а интегральный преобразователь координат имеет узел моделиров.ания вращения груза, датчик угла поворота грузоподъемного устрой-; ства, нелинейный преобразователь и дополнительный преобразователь, при этом информационные выходы узла интегрирования поворота грузоподъемного устройства через датчик угла поворота грузоподъемного устройства подключены к первому входу узла моделирования вращения груза, второй вход которого соединен с выходом узла задания габаритов груза и с первым входом дополнительного преобразователя, управляющий выход узла задания .массы груза подключен к третьему входу узла моделирования вращения груза, выход которого через нелинейный преобразователь соединен с вторыми входами дополнительного преобразователя, выходы которого полключены к информационным входам блока отображения информации. На фиг. 1 представлена блок-схема тренажера; на фиг. 2 - система координат представления переменныхi на фиг. 3 - блок-схема узла моделиро вания вращения груза. Тренажер содержит узлы моделирова НИН механизмов: подъема груза 1, изменения вылета стрелы 2, поворота крана 3, входящие в состав имитатора управления грузоподъемнь1м устройством .4, одним входы которого соеди неныс блоком 5 управления, состоящим из командоаппарата 6 подъема, командоаппарата 7 вылета и поворота и блока 8 тормоза поворота, другие с блоком задания эталонов 9, состоящим из узла 10 задания массы груза и узлы 11 задания ветра, а выходы соединены с блоком 12 отображения информации, состоящим из электроннолучевого индикатора 13, коммутаторов 14 и 15, сумматоров 16-19, генератора 20 синусоидальных колебаний, модулятора 21, источника 22 света, кон денсатора 23, кадрового окна 24, вра щающегося диапозитива 25,. объектива 26, зеркала 27 с узлом определения момента установки грузов 28 и интегральным преобразователем 29 координат, состоящим из узла 30 интегрирования поворота грузоподъемного устройства, узлов .31 и 32 преобразования координат, узла 33 моделирования движения груза 33 и сумматоров 34-37 Преобразователь координат соединен с блоком 12 .отображения информации, блоком задания эталонов 9 и блоком 38 умножения, соединенным с блоком 9 задания эталонов, один из выходов которого соединен с блоком 12 отобра жения информации, а один из входов с блоком 39 случайного изменения мас сы груза, вход которого соединен с узлом 28 определения момента установ ки грузов. Узел Ю задания массы гру за соединен со входом узла 40 модели рования вращения груза, второй вход которого соединен с узлом 41 задания габаритов груза, входящего в состав блока9 задания эталонов, третий вход - с датчиком 42 угла поворота грузоподъемного устройства, а -выход с нелинейным преобразователем 43, выходы которого соединены с входами допсАлнительного преобразователя- 44 координат; третий вход которого сое динен с узлом 41 задания габаритов груза, а выходы - с входами суммато ров 45,-48, другие входы которых сое динены с выходами сумматоров 35 и 3 а выходы - со входами коммутаторов. Вход датчика 42 угла поворота соеди нен с выходом узла 30 интегрировани поворота. Датчик 42 угла поворота, нелинейный преобразователь.43 и дополнительный преобразователь 44 коЬ динат входят в состав интегрального преобразователя 29 координат, а сумматоры 45-48 - в блок 12 отображения информации. Узел 40 предназначен для моделирования вращения груза (решения дифференциального уравнения (1), приближенно, но с достаточной точг . ностью описывающего процесс вращения висящего на канате груза) (tf-0), где oL- момент инерции груза; Ч - угол поворота крана; е - угол между перпендикуляром к длине груза и осью X (см. фиг. 2); постоянный коэффициент, зависящий от жесткости канатной подвески. Узел 40 (фиг. 3) реализуется при помощи аналоговой вычислительной техники (операционных усилителей, конденсаторов, резисторов, реле). На вход узла 40 поступают следующие аналоговые величины: 1 - длина .груза (с выхода узла 41), m - массы труза (с выхода узла 10), Ч - угла поворота (с выхода датчика 42), а с выхода узла 40 идет сигнал-аналог (-8). Изменение массы и длины груза приводит к изменению момента инерции груза, в модели при изменении длины груза изменяется.емкость в обратной связи первого усилителя,- путем подключения параллельно нескольких конденсаторов. Конденсатор1э коммутируются при помощи контактов реле, обмотки которых управляются от узла 41. Аналог массы груза поступает на пороговые элементы в узле 40, которые настроены на разный порог срабатывания и при изменении массы груза управляют обмотками реле. Реле, в свою очередь, коммутирует конденсаторы в обратной связи усилителя.Узел 41 предназначен для задания габаритов (длины) груза. Он может быть выполнен в виде набора коммутационных кнопок,с которых подается управляю- . щее воздействие на обмотки реле в узле 40. Датчик 42 предназначен для преобразования механического сигнала аналога угла поворота крана в электрический сигнал. Вал датчика 42 угла поворота крана механически связан с выходом блока инте грирования поворота, а выход подключен по входу узла 40 моделирования вращения груза. В качестве датчика 42 угла поворота может быть использован потенциометр. Нелинейный преобразователь 43 предназначен для получения синуса и косинуса разности углов (Ч-9). На вход преобразователя 43 поступает сигнал-аналог (f-G) с выхода узла 40 а с выходов преобразователя 43 идут сигналы s i n (W-0) и cos (If-9) на вход дополнительного преобразователя 44 координат. Преобразователь 44 координат пред назначен для вычисления координат концов длинномерного груза относительно центра груза. На входы преоб разователя 44 поступают сигналы-ана логи синуса и косинуса (Ч-в) с нелинейного преобразователя 43 и длины груза с выхода узла 41 задания габа ритов груза, а с выхода преобразова теля 44, в соответствии с выражения ми (2-5) -аналоги S , S , и r (см. фиг. 2) поступают на сумматоры 45-48. S S - - cos (Ч-в) (3) r г+ - sin (if-e) (4) sin (f-e) Преобразователь 44 координат может быть выполнен как набор суммато ров. При изменении 6 изменяется вход ной коэффициент одного из входов этих сумматоров. Сумматоры 45-48 предназначены для вычисления коорди нат концов груза относительно оси крана и плоскости стрелы, их входы подключены к выходам преобразовател 44 координат и сумматоров 35, 36, а выходы - с входами коммутаторов 14 и 15. f Тренажер работает следующим обра зом. .. При включенном тренажере на экра не блока 12 отображения информации видны: .световая линия, длина которо зависит от длины груза,а яркость - от массы груза, исходящая из ее середи ны наклонная световая линия, длина которой зависит от высоты груза над землей, световая окружность, а также план участка порта. Таким образом имитируется реально наблюдаемая оператором обстановка, изменяющаяся в зависимости от положения в пространстве грузоподъемного устройства и гр за. . . При воздействии обучаемого на органы управления блока 5 управления в блоках 4, 33 и 40 возникают процессы, моделирующие процессы движения реального грузоподъемного устройства что вызывает изменение аналогов высо ты груза, вылета стрелы, угла поворо та грузоподъемного устройства,, откло нения груза от точки подвеса, угла поворота груза относительно точки подвеса. Это, в .свою очередь, приводит к изменению наблюдаемого оператором изображения , а именно: перемещению световой линии, изображающей груз, перемещению окружности, изображающей точку подвеса канатов, изменению длины наклонной динии, показывающей высоту груза над плоскостью опоры и т.д. Моделирование процесса вращательного движения груза, его размеров и обеспечения его визуальной имитации позволяет осуществлять на тренажере отработку тренировочных задач управления грузоподъемным устройством в условиях, имитирующих перегрузку длинномерных грузов и, вследствие этого, повысить эффективность .тренажа. Формула изобретения Тренажер оператора грузоподъемных устройств, содержащий имитатор управления грузоподъемным устройством, который соединен с блоком управления и блоком задания эталонов, который имеет узел задания массы груза, интегральный преобразователь кобрдинат, имеющий узел интегрирования поворота грузоподъемного устройства, который подключен к имитатору управления грузоподъемным устройством и к блоку отображения информации, о т личающийся тем, что, с целью повышения эффективности тренажа блок задания эталонов снабжен узлом задания габаритов груза, а интегральный преобразователь координат имеет узел моделирования вращения груза, датчик угла грузоподъемного устройства, нелинейный преобразователь и дополнительный преобразователь, при этом информационные выходы узла интегрирования поворота грузоподъемного устройства через датчик угла поворота грузоподъемного устройства подключены к первому входу узла моделирования вращения груза, второй вход которого соединен с выходом узла задания габаритов груза и с первым входом дополнительного преобразователя, управляющий выход узла 1задания массы груза подключен к Третьему входу узла моделирования вращения груза, выход которого через нелинейный преобразователь соединен с вторыми входами дополнительного преобразователя, выходы которого подключены к информационным входам блока отображения информации. Источни и информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 750550, кл. G 09 В 9/04, 1977.
Г7--ч
I С
