Изобретение относится к монтажной технике и может быть использовано для монтажа, обслуживания ( при эксплуатации) электрокоммуникации, расположенных в промышленных зданиях и открытых площадках в зоне подкрановой балки. Кроме тото, может быть использовано и в других областях промьашленности для выполнения различных видов работ: сантехнических, монтажа и обслуживания коммуникаций,
По основному авт.св. №863506 известно подъемно-транспортирующее устройство для.монтажных работ, содержащее подвижную от привода раму с горизонтальными, и вертикальными ходовыми роликами, установленную на рельсы подкрановой балки, и подвесную раму с рабочей площадкой. На приводной раме смонтирована поворотная стрела с механизмом подъема груза, а подвесная рама выполнена Г-образной формы, на вертикальной части которой установлены с возможностью регулировки по высоте и длине опорные кронштейны, каждый из которых состоит из основной и откидывающейся части, при этом на последней шарнирно закреплен горизонтальный ролик, контактирующий с боковой поверхностью подкрановой балки. На откидывающейся части опорного кронштей-ч на закреплен трехплечий рычаг, взаимодействующий с микровыключателем привода передвижения рамы.
Наличие на боковых поверхностях подкрановых металлических балок Дополнительных ребер жесткости на вставках в местах температурных, швов, а также, возможного наличия кронштейнов, привариваемых к нижней полке подкрановой балки ( для удерживания ВОДО-, газо- и трубопроводов) , делает для подъемно-транспор-. тирующего устройства предлагаемой конструкции невозможным перешагивание их только при аличии откидных кронштейнов с горизонтальными роликами.
20
Цель изобретения - повышение маневренности устройства.
Поставленная цель достигается тем, что оно снабжено дополнительным роликом j расположенным в плоскости, .
25 перпендикулярной п .лоскости расположения горизонтального ролика, и рычагом, который установлен на откидывающейся части кронштейна и на котором смонтирован дополни.тельный ролик, на шарнире крепление
упомянутого рычага - горизонтальный ролик, а также механизмом для фиксации упомянутых роликов для поочередной их работы.
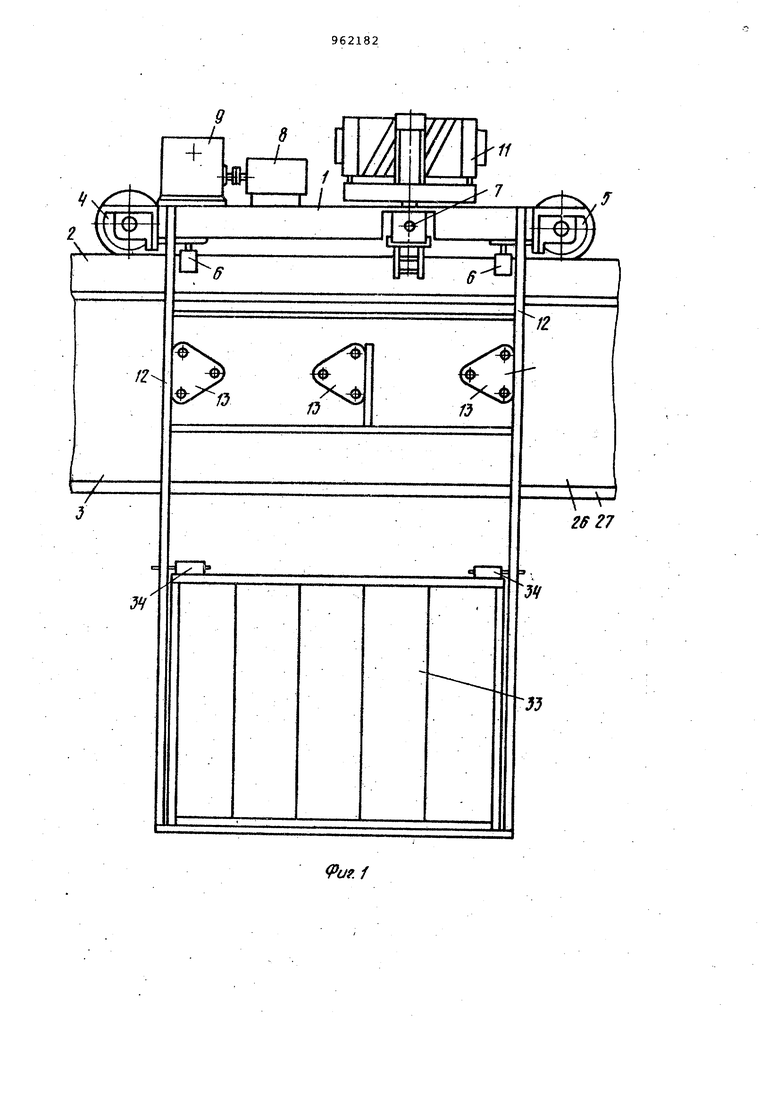
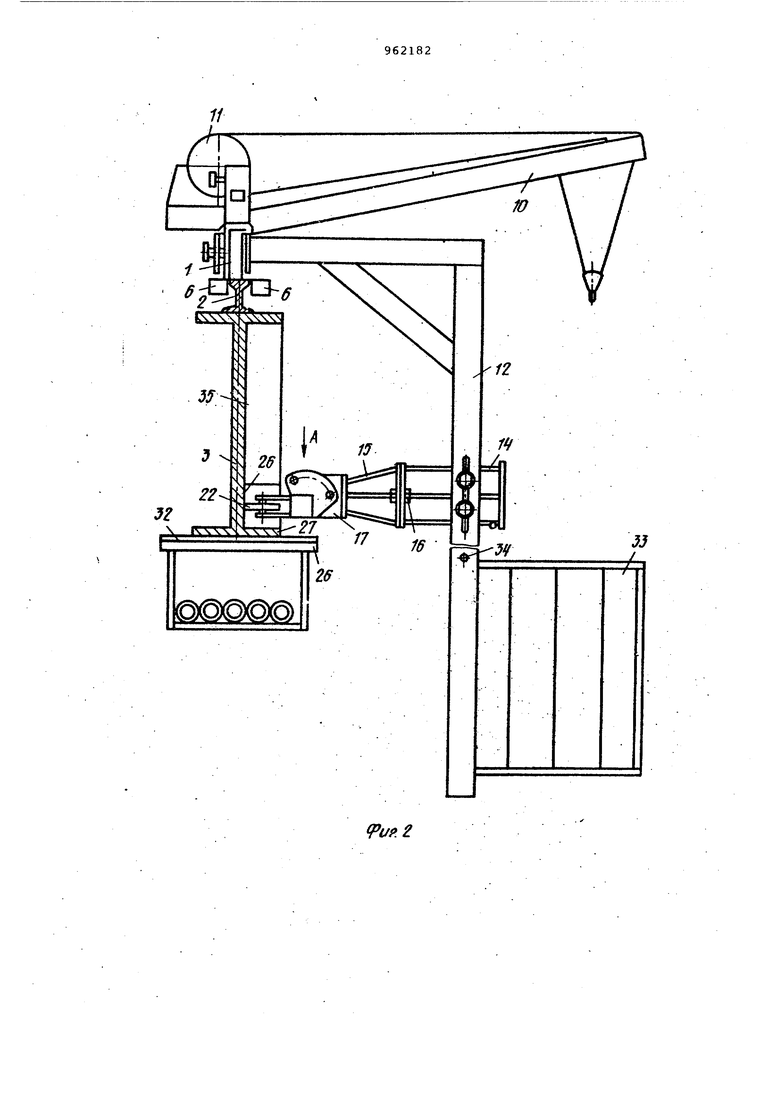
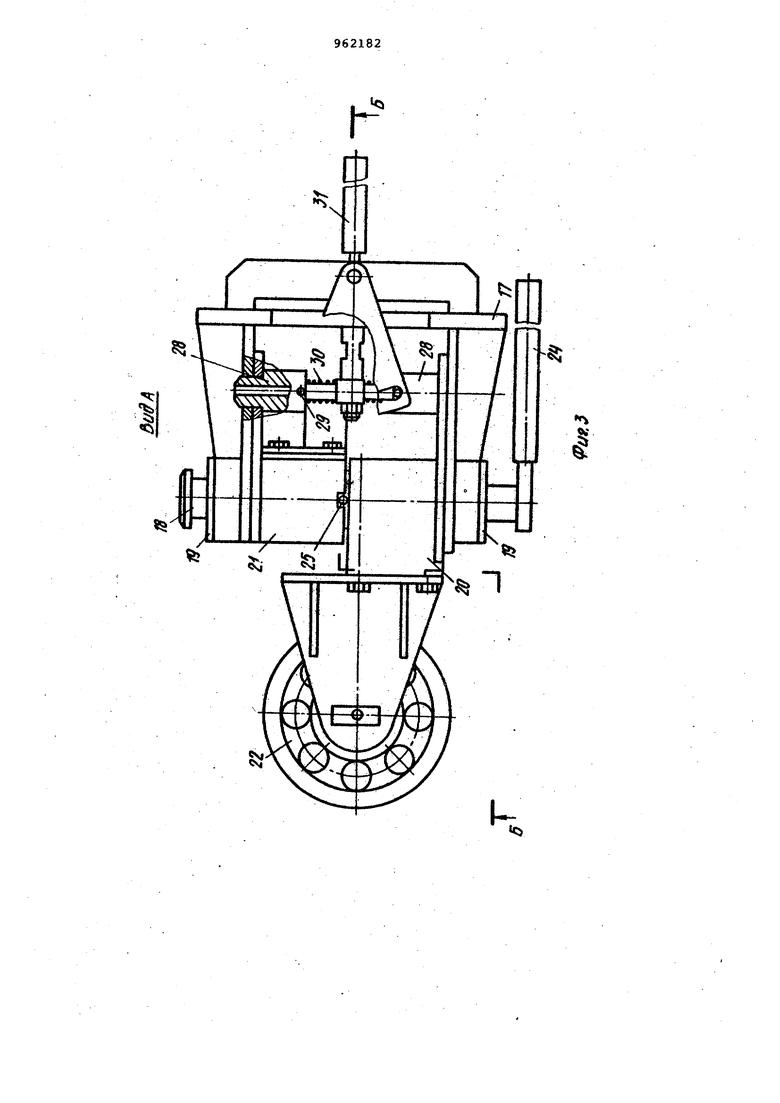
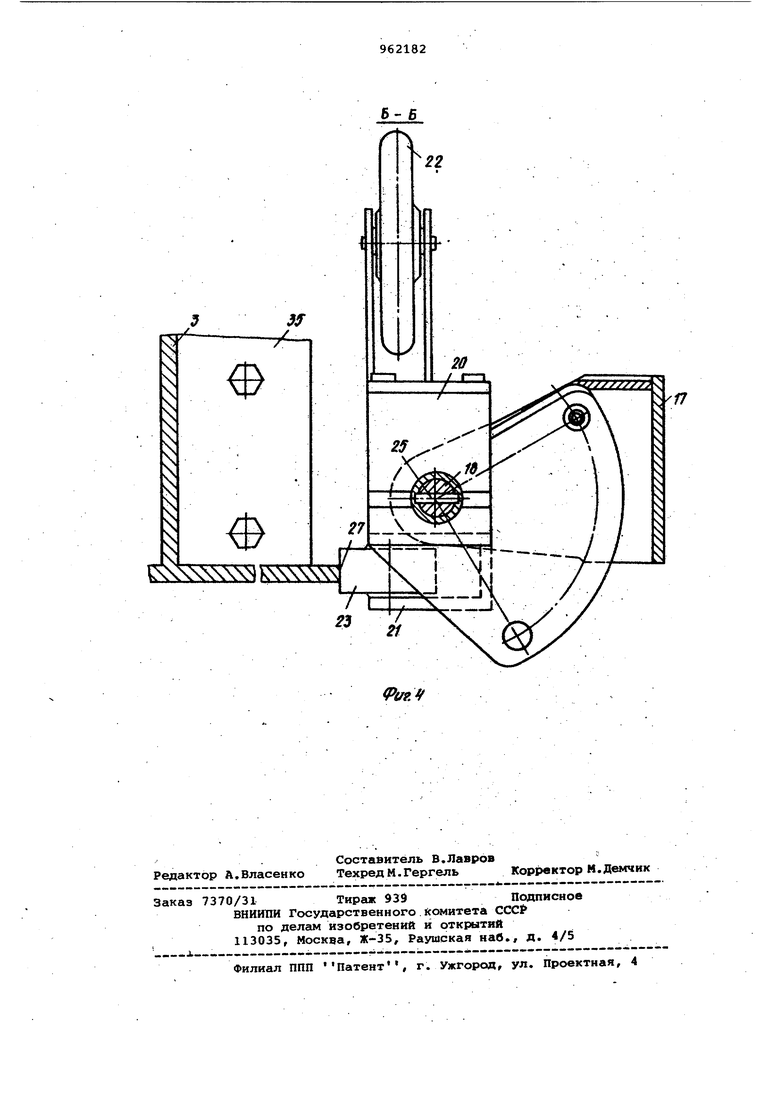
На фиг.1 изображено предлагаемое устройство, общий вид на фиг,2 то же,вид сбоку; на фиг.З - вид А горизонтального ролика с дополнительным роликом, рукояткой переключения и механизмом фиксации; на фиг.4 - разрез Б-В на фиг.З.
Подъемно-транспортирующее устройство включает подвижную от привода раму 1, установленную на рельс 2 подкранс)вой балки 3, с помощью горизонтальных ходовых роликов 4 и 5 и вертикальных ходовых роликов б, фиксирует ходовую раму в определенном месте и придает ей дополнительную устойчивость относительно рельса, механизм 7 зажима г например, состоящий из винта с правойИ левой резьбой с навинчивающимися щеками, охватывающими головку рельса при зажиме. На раме 1 установлен механизм ее перемещения, состоящий из электродвигателя 8, редуктора 9 и горизонтальных ведущего 4 и ведомого 5 роликов , а также механизм подъема груза, состоящий из стрелы 10, поворачивающейся на 120, и электротельфера 11.
На подвижной от привода раме 1 смонтирована подвесная рама Г-образной формы 12 с установленными на ней регулируемыми на высоте и длине опорными кронштейнами 13, каждый из которых состоит из 2-х частей: основной 14 и откидашающейся 15. Они снабжены механизмом откидывания в горизонтальной плоскости по плос- . костям и Д, возврата в исходное положение и замком 16.
На откидывающей части 15 каждого опорного кронштейна 13 установлено основание 17, на котором с помощью ; шарнира крепления рычага, состоящего из оси 18 и втулок 19, крепятся рычаги 20 и 21 для управления горизонтальным роликом 22 и дополнительньв 1 роликом 23 соответственно. На оси 18 установлена рукоятка 24 и палец 2 5, служащие для поочередного подвода основного 22 и дополнительного 23 ролигсов в контакт с боковой поверхностью 26 или нижйей полкой 27 подкрановой балки 3 соответственно. На основании 17 установлен механизм фиксации, состоящий из фиксатора 28 со штифтами 29, служаидих для фиксации рычагов 20 и 21 и соответственно роликов в рабочем и откинутом положениях с помощью пружин 30 и сектора 31 с рукояткой. Уголок 32 приварен к нижней поверхности подкрановой балки 3.
На подвесной раме Г-образной формы 12 установлена подвижная рабочая площадка (кабина) 33 с пультом управления (не показан).
Подвесная рама Г-образной формы выполнена с направляющими, предназначенными для передвижения подвижной рабочей площадки 33 в вертикальной плоскости с фиксацией ее по высоте с помощью шпингалетов 34. Устройство содержит ребро жесткости, уклон или выступ 35, которое должно перешагнуть устройство.
Предлагаемое устройство используется следующим образом.
С помощью автокрана устройство устанавливается на рельс 2 подкрановой балки 3, причем на земле предварительно регулируется уровень установки подвижной рабочей площадки 33 и длина опорных кронштейнов 13 в зависимости от типа подкрановой балки 3. Монтажник переходит в подвижную рабочую площадку 33.
Автокран высвобождается.
К пульту управления подключается электроэнергия с помощью кабеля. Все УСТРОЙСТВОпередвигаетсяК месту выполнения работ и жестко фиксируется механизмом зажима за головку рельса 2 для придания ему дополнительной устойчивости. Причем с помощью механизма подъема груза, а именно стрелы 10 и электротельфера 11 на высоту доставляется длинномерный груз (троллей, швеллеры, трубы и т.п.), а небольшой груз (кронштейн, уголки и т.д.) и инструмент располагается в подвижной рабочей площадке 33. После подъема груза начинается выполнений электромонтажных работ, например, монтаж троллеев. Периодическое перемещение устройства вдоль подкрановой балки 3 и доставка груза в процессе выполнения монтажных работ осуществляется монтажником с пульта управления подвижной рабочей площадки 33.
При передвижении устройства, для того,чтобы опорные кронштейны 13 могли перешагнуть отдельное ребро жесткости, выступ или уклон 35 на, боковой поверхности подкрановой балки 3, часть каждого кронштейна 15, контактирующая с поверхностью балки 3, откидывается монтажником с рабочей площадки 33 в горизонтальной плоскости по плоскостям Т и Д в зависимости от направления движения, возвращается тем же способом в исходное (рабочее) положение и фиксируется замком 16. : При перемещении подъемно-транспортирующего устройства в местах вставок (температурных швов), когда невозможно перешагнуть несколько ребер жесткости откидыванием опорных кронштейнов 15, можно пройти эту зону с помощью дополнительных горизонтальных роликов 23 по нижней кром ке 27 подкрановой балки 3 следующим образом. Электромонтажник с рабочей площадки 33 рукояткой сектора 31 ос вобождает фиксатор 28, расфиксируя ем самым рычаг 21 дополнительного горизонтального ролика 23. С помощью рукоятки 24,соединённой с осью 18 и имеющей палец 25, находящийся в пазу рычага 21, разворачивают его до соприкосновения дополнительного ролика 23 с поверхностьюнижней кромки 27 подкрановой балки 3. Затем рукояткой сектора 31 и пружиной 30 фиксируют рычаг 21, а вместе с ним и дополнительный ролик 23. Затем рукояткой 24 перемещают ось 18 вдоль ее собственной оси, выводят палец 25 из паза рычага 21 и вводят в паз рычага 20. Рукояткой ceKTOpia 31 освобождают фиксатор 28, расфиксируя тем самым. рычаг 20 горизонтального ролика 22, а движением ролика 24 поворачивают, рычаг 20 горизонтального ролика 22, выводя его из контакта с Соковой псверхностью 26 подкрановой балки 3, устанавливая вертикально, фиксируют его с помощью сектора 31 и пружины 30 описанным выше способом. Переход при передвижении подъемно-транспортирукадего устройства с до полиительного ролика на горизонтальный в случае необходимости (например при прохождении устройством мест по нижней кромке подкрановой балки, тде может быть приварен уголок 32 крепления хомутика для удержания ВОДО-, газог- и трубопроводов)., осуществляется монтажником теми же опирациями только в обратном порядке. Таким образом, устройством предлагаемой конструкции для монтажника гарантируется невозможность выведения обоих роликов из контакта с боковой поверхностью или с нижней кромкой подкрановой балки одновременно. В-случае недосмотра монтажником для предотвращения столкновения опорного кронштейна с ребром жесткЬсти или технологическим уголком, срабатывает блокировка, выполненная в виде трехплечевого рычага, связанного с микровыключателем, отключающим механизм перемещения всего устройст,ва; Блокирующее устройство установлено .на откидывающейся части 15 кронштейна. При полном окончании монтажных работ устройство снимается с рельса и складывается в транспортное положение. Использование изобретения позволит обеспечить повышение маневренности устройства, расширение его области применения и сокращение трудозатрат при производстве злектромантажных работ. Формула изобретения Подъемно-транспортирующее устройство для монтажных работ по авт. icB. 86350.6, о тличающеес я тем, что, с целью повышения маневренности устройства, оно снабжено дополнительным роликом, расположенным в плоскости, перпендикулярной плоскости расположения горизонтального ролика, и рычагом, который установлен на откидывающейся части кронштейна и на котором, смонтирован дополнительный ролик, на шарнире крепления упомянутого рычага - горизонтальный ролик, а также механизмом для фиксации упомянутых роликов для поочередной их работы.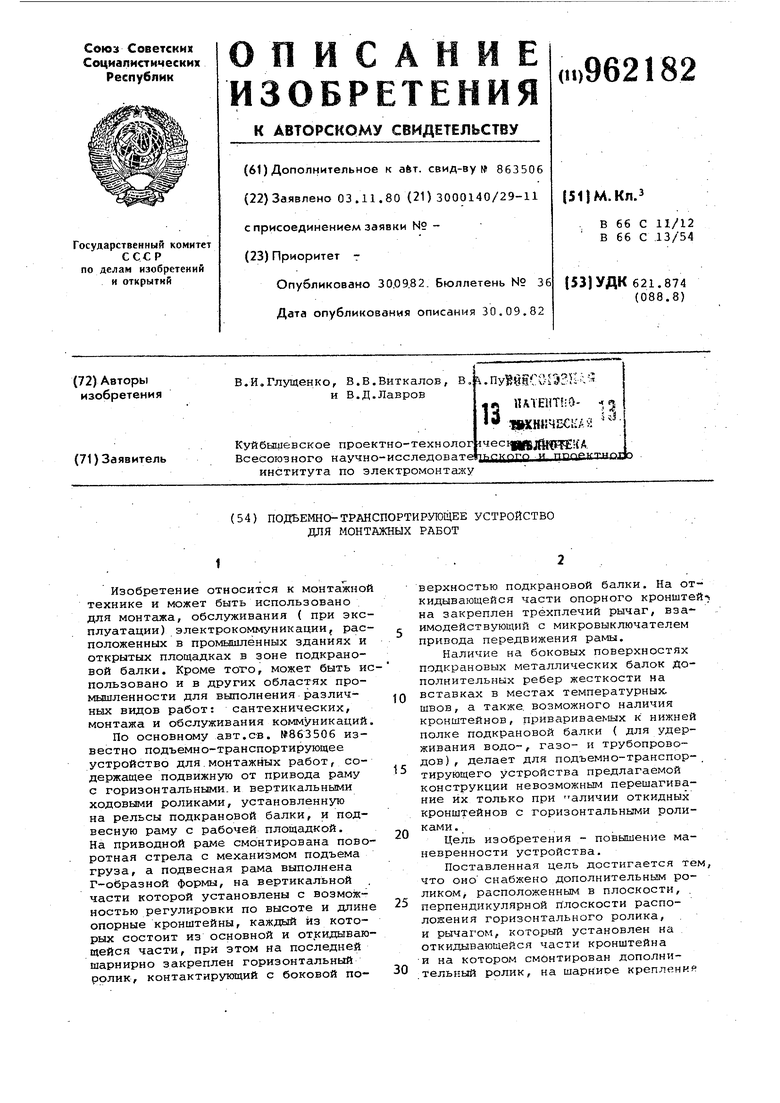
| название | год | авторы | номер документа |
|---|---|---|---|
| Подъемно-транспортирующее устройство для монтажных работ | 1977 |
|
SU863506A1 |
| Подъемно-транспортирующее устройство для монтажных работ | 1984 |
|
SU1203007A2 |
| Подъемно-транспортирующее устройство для монтажных работ | 1981 |
|
SU1006361A1 |
| ПОДВЕСНОЙ КОНСОЛЬНО-КОЗЛОВОЙ КРАН | 1966 |
|
SU181794A1 |
| Канатная дорога | 1991 |
|
SU1796512A1 |
| КРАН ДЛЯ ОБРАЩЕНИЯ С ОТРАБОТАВШИМ ЯДЕРНЫМ ТОПЛИВОМ В ЗАЩИТНОЙ КАМЕРЕ | 2007 |
|
RU2352516C1 |
| САМОМОНТИРУЮЩИЙСЯ КОЗЛОВОЙ КРАН | 2019 |
|
RU2765774C2 |
| БУРОВАЯ УСТАНОВКА С ГИДРАВЛИЧЕСКИМ МЕХАНИЗМОМ ВЫРАВНИВАНИЯ | 2015 |
|
RU2577349C1 |
| Грузозахватное устройство | 1990 |
|
SU1787924A1 |
| Мостовой кран | 2023 |
|
RU2820482C1 |
п
jy
fpuf.2
I
Ǥ
l SxVvV
t/SiV vXN
