исполнительного механизма соединен с входом первого порогового элемена, выход обратного клапана соединен с входом второго исполнительного элемента, выход усилителя соединен с входом детектора. В данной следяей системе задатчйк (задающее устройство) управляет двумя посл овательно срабатывающими объектами, имеющими характеристику с односторонним ограничением, бортовым фрикционом и тормозом при помощи исполнительных механизмов (поршней бортового фрикциона и тормоза). Следящее действие осуществляется за счет элемента сравнения и устройств обратной связи. На участке управления бортовым фрикционом задающее устройство и устройства обратной связи имеют линейную характеристику. Диски бортового фрикциона пол- , костью размыкаются и при переходе на управление тормозом остаются в разомкнутом состоянии 2.
Таким образом, часть перемещения задатчика не- влияет на соверше-, ние поворота трактором и практически оказывается нерабочей, что является недостатком системы управления, к иедостаткам системы следует отнести и то, -что управление тормозом осуществляется, практически начиная с фиксированного усилия, определяемого конечньм усилием для выключения фрикциона.
Цель изобретения - повышение точности управления.
Указанная цель достигается тем, что система содержит последовательно соединенные второй пороговый элемент и релейный элемент, вход второго порогового элемента соеди- . иен,с выходом задатчика, а выходы первого и второго датчиков обратной связи соединены с вторым входом сравнивающего устройства через релейный элемент.
Причем задатчйк содержит два резистора и потенциометр, подвижный контакт которого соединен непосредственно с выходом задатчика, через последовательно включенные второй замыкающий контакт релейного элемента ипервый резистор и через последовательно соединенные второй размык щий контакт релейного элемента и второй резистор соответственно с первым и вторьм выводами потенциометра.
При этом задатчйк выполнен с нелинейной характеристикой, симметричной характеристике последовательно срабатывающих объектов относительно входной величины объектов .
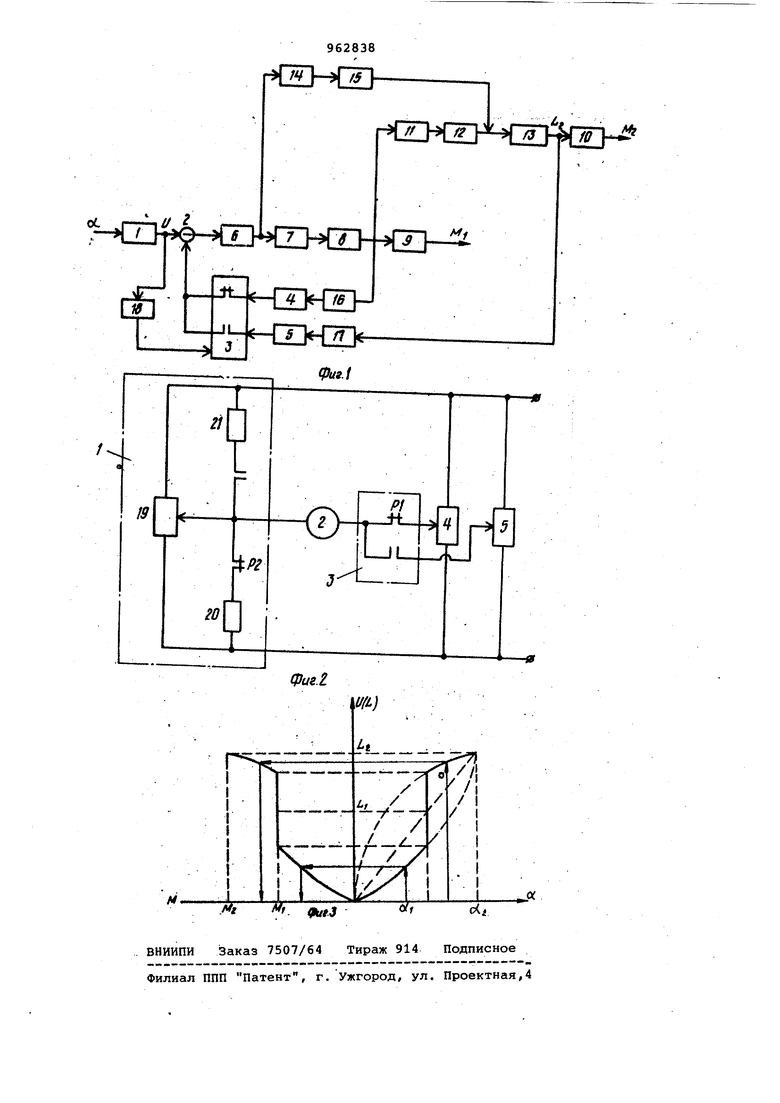
На фиг.1 изображена функциональная схема следящей системы на
фиг.2 - функциональная схема задатчика системы; на фиг.З - график характеристики задатчика в координатах cLV, где d- - сигнал на входе задатчика; и - сигнал на выходе задатчика, и график характеристики последовательно включаемых объектов регулирования в координатах LM, где L - сигнал на входе объектов; М сигнал на выходе объектов.
; Следящая система содержит задатчйк 1, сравнивающее устройство 2, .релейный элемент 3, устройства 4 и 5 обратной связи, усилитель 6, первый, преобразователь 7 сигналов, первый i
5 исполнительный механизм 8, первый ;f объект 9, второй объект 10, первое пороговое устройство 11, обратный клапан 12, второй исполнительный механизм 13,. детектор 14, второй
Q преобразователь 15 сигналов, третий преобразователь 16 сигналов, четвертый преобразователь 17 сигналов, второе пороговое устройство 18.
.Задатчйк 1 (фиг.2) выполнен в вис Де задающего потенциометра 19 и резисторов 20 и 21. Потенциометр 19, резисторы 20 и 21 выбираются из учета характеристик объектов регулирования.
Электрогидравлическая следящая система управления поворотом трактора (бортовым фрикционом и тормозом) работает следующим образом.
Оператор, перемещая рукоятку управления, изменяет сигнал cL на выходе задатчика 1 от нуля до cL .(фиг.З), В этом случае происходит управление объектом 9. При этом сигнал с выхода потенциометра 19 и резистора 20 поступает на сравнивающее устройство 2. Разность между выходным сигналом задатчика 1 и сигналом устройства 4 обратной связи поступает в усилитель 6, затем в преобразователь 7 сигнала и на исполнительный механизм 8, который приводит в движение объект 9.
Сигнал на перемещение L исполнительного механизма 8 через преобразователь 16 сигнала поступает на устройство 4 обратной связи. При этом вследствие того, что характеристика задатчика 1 симметрична характеристике объекта 9 относительно входной величины объекта, в работе системы наблюдается пропорциональное изменение выходной величины объекта 9 М относительно величины входного воздействия систе.мы ,
0 при установке рукоятки управления в положение, соответствующее началу ограничения в характеристиках объектов 9 и 10 (выходная величина ,объекта 9 достигла значения М-,),
5 срабатывает пороговое устройство 18,
подавая сигнал на переключение релейного элемента 3, который одновременно отключает устройство 4 обратной связи и дополнительный резистор 2.0, подключая к сравнивающем устройству 2 устройство 5 обратной связи, а к задающему потенциометру 19 - дополнительный резистор 21.
При этом сигнал с выхода потенциометра 20, измененный резистором 22, поступает на сравнивающее устройство 2. Разность между выходным сигналом задатчика 1 и сигналом устройства 5 обратной связи поступает в усилитель б, преобразователь 7 сигнала, исполнительный механизм 8, В конце движения исполнительного механизма 8 (выходная величина механизма достигла значения L), соответствующего полному перемещению объекта 9, пороговое устройство 11, и сигнал с
выхода исполнительного механизма 8 через обратный клапан 12 поступает на исполнительный механизм 13, приводящий в движение объект 10, который как и объект 9 проходит зону ограничения.
Таким образом, при управлении бортовым фрикционом 9 диски фрикциона перемещаются на весь ход. Одновременно лента тормоза осуществляет свободный ход и начинает касаться тормозного барабана. Сигнал на перемещение исполнительного механизма 13 через преобразователь 17 сигнала поступает на устройство 5 обратной связи. При дальнейшем перемещении рукоятки до величины cL происходит управление объектом 10. При этом вследствие того, что характеристика задающего устройства 1 (фиг.З) симметрична характеристике объекта 10 относительно его входной величины, в работе системы наблюдается пропорциональное изменение выходной величины М объекта 10 относительно входного воздействия системы d .
При возвращении рукоятки в исходное положение сигнал от усилителя 6 одновременно поступает через преобразоваггель 7 сигнала, исполнительный механизм 8 на объект 9, а через устройстве 14, преобразователь 15 сигнала, исполнительный механизм 15 - на объект 10. Вследствие этого объекты 9 и 1.0 одновременно возвращаются в исходное положение.
. Следящая система может быть также использована и для управления одним объектом с нелинейной характеристикой. В этом случае вся схема
сокращается, а згщгиощее устройство выполняется симметричным характеристике, например, муфты сцепления.
Фсрмула изобретения
1. Следящая система, содержащая последовательно соединенные задатчик, сравнивающее устройство, уси10литель, первый преобразователь сигналов, первый исполнительный механизм и первый объект управления, последовательно соединенные детектор, второй преобразователь сигналов, второй исполнительный механизм и
15 второй объект управления, последовательно соединенные первый пороговый элемент и обратный клапан, а .также третий и четвертый преобразователи сигналов, выходы которых соеди20нены соответственно с первым и вторым датчиками обратной связи, а входы - соответственно с выходами первого и второго исполнительных механизмов, выход первого исполни25тельного механизма соединен q входом первого порогового элемента, вы- ход обратного клапана соединен с j входом второго исполнительного ме- ; ханизма, выход усилителя соединен с
30 входом детектора, о т л и ч а ющ а я с я тем, что, с целью повышения точности системы, она содержит последовательно соединенные второй пороговый элемент и релейный элемент,
5 вход второго порогового элемента соединен с выходом эадатчика, а выходы первого и второго датчиков обратной связи соединены с вторым входом сравнивающего устройства рез релейный элемент.
2. Следящая система по п. 1, отличающаяся тем, что задатчик содержит два резистора и потенциометр, подвижный контакт ко5торого соединен с выходом задатчика непосредственно и через последовательно включенные второй замыкающий контакт релейного элемента и первый резистор и через последовательно соединенные размыкающий кон0такт релейного элемента и второй резистор соответственно с первым и вторым выводс1ми потенциометра.
Источники информации, принятые во внимание при экспертизе
5
1.Авторское свидетельство СССР 178965 кл. G 05 В 11/01, 1968.
2.Передача мощности на тракторе Д9. Проспектфирмы США Катерпиллар, HP Р70467-75 , 1975, с.29032 (прототип). 
| название | год | авторы | номер документа |
|---|---|---|---|
| Узел слежения и ограничения пути механизма в автоматической системе управления линейками манипуляторов блюминга | 1981 |
|
SU977079A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1971 |
|
SU311248A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1999 |
|
RU2161579C1 |
| Многоканальный регулятор | 1982 |
|
SU1100606A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ФРИКЦИОННЫМ ЭЛЕКТРОПРИВОДОМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2004 |
|
RU2263338C1 |
| Следящий привод | 1985 |
|
SU1270745A1 |
| СПОСОБ УПРАВЛЕНИЯ ЩИТОМ ТОННЕЛЕПРОХОДЧЕСКОГО КОМПЛЕКСА И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2509892C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| РЕГУЛЯТОР СКОРОСТИ КОЛЕСА ТРАНСПОРТНОЙ МАШИНЫ | 1992 |
|
RU2065367C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1990 |
|
RU2015521C1 |
ОС .г-гЦ L
1
фиг.1
