(54) УЗЕЛ СЛЕЖЕНИЯ И ОГРАНИЧЕНИЯ ПУТИ МЕХАНИЗМА В АВТОМАТИЧЕСКОЙ СИСТЕМЕ УПРАВЛЕНИЯ ЛИНЕЙКАМИ МАНИПУЛЯТОРОВ БЛЮМИНГА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для обучения и контроля совместной работы операторов | 1985 |
|
SU1345235A1 |
| Способ лыжеобразования слитка на реверсивном стане горячей прокатки с индивидуальным приводом валков | 1978 |
|
SU766688A2 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО ЗАМЕДЛЕНИЯ ЛИНЕЕК МАНИПУЛЯТОРА РЕВЕРСИВНОГО ОБЖИМНОГО ПРОКАТНОГОСТАНА | 1970 |
|
SU282261A1 |
| Устройство автоматического управления режимом улавливания раската линейками манипулятора обжимного реверсивного прокатного стана | 1975 |
|
SU546401A1 |
| Устройство для формирования сектора запрета | 1981 |
|
SU964577A1 |
| Тиристорный электропривод постоянного тока | 1978 |
|
SU771836A1 |
| ВСЕСОЮЗН.А^Я | 1973 |
|
SU369953A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1758823A1 |
| Ограничитель скорости подъемника | 1978 |
|
SU740675A1 |
| Следящий фотоэлектрический датчик | 1960 |
|
SU150809A1 |
1,
Изобретение относится к автоматическому управлению и может быть использовано В схемах регулирования по положению.
Известна система автоматического, управления линейками манипулятора и кантователя блюминга 1300 Западно-Сибирского метзавода, выполненная на магнитных логических элементах серии ЛТ (1).
Недостатком системы является невозможность ее применения в быстродействующем тиристорном электроприводе.
Наиболее близким к предлагаемому по. технической сущности является узел слежения и ограничения пути механизма в автоматической системе регулирования линеек манипуляторов блюминга, содержащий следящие сельсины на валу механизма обеих линеек, фазочувствительные выпрямители, операционные усилители,, функциональные, преобразователи, функциональные преобразователи, регулируемые ограничители, задатчики интенсивности и контактные реле 2.
Недостатками данного технического решения ЯВЛЯЮТСЯ использование электромагнитных реле для переключения направления перемещения, недостаточная надежность.
Цель изобретения - повышение надежности работы узла слежения и ограничения
пути механизма.
Поставленная цель достигается тем, что В узле слежения и ограничения пути механизма В автоматическрй системе регулирования линеек манипуляторов блюминга, содержащем .В каждом канале системы управления, левой и правой линейками интегро-задающее устройство, два регулируемых усилителя с однополярной релейной характеристикой, следящий сельсин-датчик на валу механизма и фазо-выпрямительное уст ройство, ВЫХОДЫ сельсинов-датчиков соединены через фазо-выпрямиельные устройства с входами первых усилителей обоих кана:лов Вторые ВХОДЫ этих усилителей соединены с выходами фазо-выпрямительных .уст20 ройств противоположных каналов, входы вторых усилителей соединены с первыми входами первых усилителей, второй выход второго усилителя каждого канала соединен с - ВХОДОМ интегро-задающего устройства, выход которого соединен с вторым выходом первого усилителя, в цепь обратной связи интегро-задаюшего устройства встречнопараллельно введены последовательно соединенные диоды и резисторы, причем к точкам соединения диодов и резисторов подсоединены первые выходы усили елей.
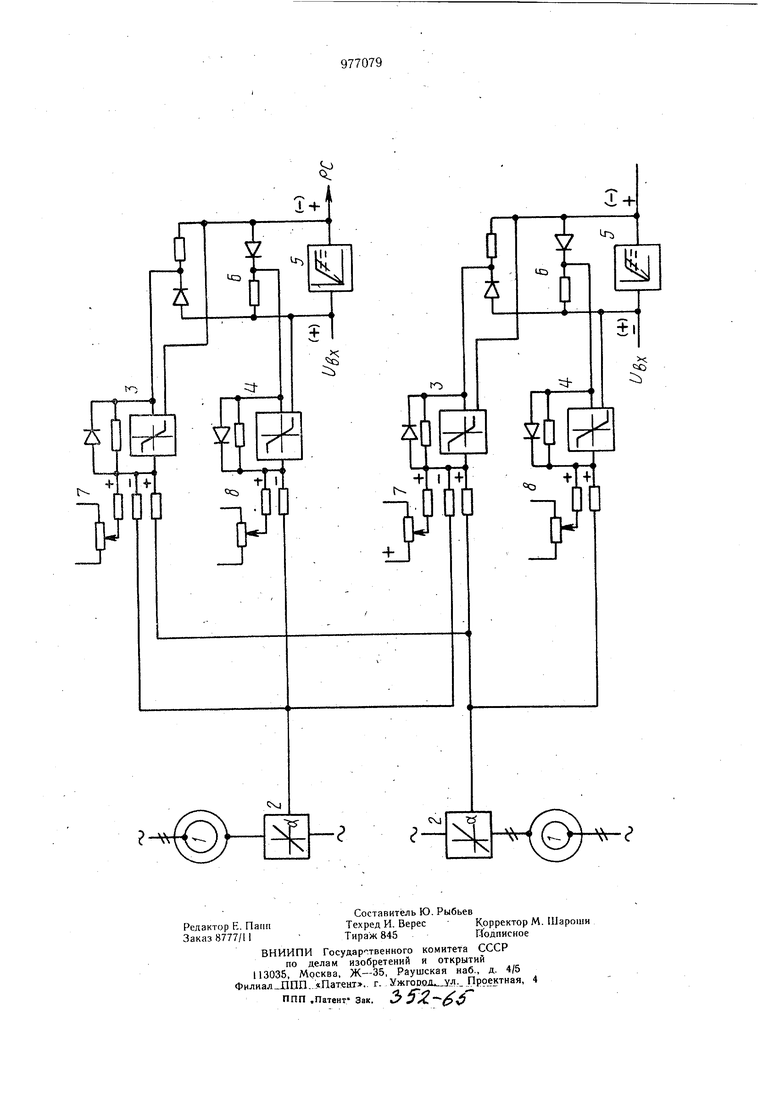
На .чертеже представлена функциональная схема узла слеж-ения.
Узел слежения включает сельсины-датчики 1 систем автоматического регулирования левой и правой линеек (тир БД 501 А) фазовыпрямиельные устройства 2, регулирующие усили|еля 3 и 4, интегро-задающйе устройства 5,диодно-резисторный контур б, потенциометры 7 и 8. .
Сельсины-датчики 1 левой, иправой ли неек манипулятора блюминга фазовыпрямительные устройства 2 подключены к входам регулируемых усилителей 3 и-4 с однополярной релейной характеристикой своей и противоположной линейки, выходы которых включены в цепь обратной связи интегро-задающих устройств 5 через диодно-резисторные контуры 6. Через потенциометры 7 и 8 усилители 3 и 4 подсоединены к устройствам 2. . ,
Устройство работает ( следующим обраЗ.ОМ., .
, При встречном движении линеек выходные сигналы от сельсинов-датчиков 1 поступают в систему регулирования через фазовыпрямительные устррйства сравниваются на входеусилителей 3, В гходноб напряжение усилителей 3 служит .Ьпррньш напряжением положительной полярнрЬти в цепи обратной связиинтегро-задаюц1их уст ройств (ИЗУ) 5. Пока это напряжение сушествует, ИЗУ действует как Задатчйк-ин-, тенсивности, формируя сигнал задания в системе регулирования, при отсутствии выходного сигнала усилителей3 опорное напряжение в обратной связи ИЗУ исчезает, ИЗУ 5 закорачиваются и з адание в канале регулирования снимается. В реальной схеме, на входе усилителей 3 предусмотрен еще один дд/юлниТельный сигнал смещеНИН - oY потенцирметров. Этот сигнал пропорционален минимально допустимому расстоянию между, линейками н принимаётся равным Дили несколько меньшим)- мини-мальной ширине прокатываемых на стане заготовокГ:;.,
Ограничение хода лииее в
рабочих положениях осуществляется с помощью других усилителей 4, вЬфабатывающих опорное, напряжение, отрицательной полярности в цепи обратной связи ИЗУ. На входе этих усилителей 4 сравниваются следующие два сигнала: переменное напряжение отрицательной полярности от сельсинадатчика на валу собственных линеек и напряжение смещения положительной полярности от источника питания через потенциометр 8. Величина этого сигнала равна максимальному напряжению сельсина-датчика, т. е, тому напряжению, которое вырабатывается сельсйно-датчиком при перемещении линеек в крайнее рабочее положение.
Результирующий сигнал на входе усилителей 4 может быть либо грложительным, либо р,авным нулю, в первом случае выходной сигнал усилителей 4 образует опорное напряжение отрицательной полярности в цепи обратной связи ИЗУ, во втором слу.чае, т. е. при равенстве сигналов на входе усилителей 4, которое наступает когда ли,нейки достигли крайнего рабочегр положения, ИЗУ закорачивается, задание на выходе ИЗУ снимается и привод останавливается. -
Рассмотрим работу схемы в реальных рабочих условиях.
Допустим, что на вход обеих систем управления подан сигнал положительной полярности, определяющий команду на встречное перемещение правых и левых линеек. На входе усилителей 3 обеих систем сравнивают .ся следующие сигналы: отрицательный от сельсина-Датчика линеек, находящийся на своей ,стороне (например, левых линеек, если сближение происходит на левой от оси .прокатки стороне); положительньж от сельсина-датчика линеек, находящийся на чужой стороне, (например,,правых линеек, ее-, ли сближение происходит на левой стороне); положительный ригнал смещения через по/тенциол етры 7 от постоянного источника питания. .
Независимо от того, fia какой стороне происходит перемещение результирующий сигнал на входе усилителей 3 обеих систем .имебт либо отрицательное- значение, либо равен нулю, последнее имеет место тогда, когда отрицательный сигнал от однргр сельсина-датчика равен сумме сигналов смещения и положительного сигнала от другого сельсина-датчика, т-, е. когда расстояние между линейками достигло минимального заданного значения. Пока на входе усилителей 3 имеется результирующее отрицательное напряжение, усилители бткрыты и инвертируемый на их выходе положительный сигнал служит опорным напряжением в обратной связи ИЗУ. Поданная на вход интегро-задающегр устройства 5 команда на сближение (сигнал « + полярности заперта в обратной связи ИЗУ 5 положительным опорным .напряжением и ИЗУ. функционируют, в обычном режиме задатчиКа интен; СИВНОСТИ. ,
Когда Напряжения на входе усилителей 3 становятся равными нулю,усилители запи- .
раются и опорное напряжение в цепи обрат5 ной связи ИЗУ снимаются., ИЗУ закорачиваются .через внутреннее сопротивление уси,: лителей 3, и напряжение в-канале регулирования снимается, привод тормозится с
максимальным динамическим током. Таким образом, достигнув ограничения по минимал} ному задранному расстоянию между линейками, система на команду сближения («+ ,на входе ИЗУ) бблее не реагирует.
Снятие ограничения достигается без дополнительных устройств, простой сменой полярности управляющей комай5,ы, т. .заменой команды.на сближение командой на расхождение. Команда на расхождение линеек определяется подачей на вход ИЗУ отрицательного сигнала, который однако.через обратную связь ИЗУ не может .пройти из-за наличия диодов в KOfjuype 6. .ИЗУ начинает действовать в своей основной функции, вырабатывая сигнал заданий. Таким образом, в то время, каксигнал положительной полярности (на сближение линеек) проходит по каналу регулирования, обеспечиваетсй работа по перемещению- механизма.
Легко проследить, что приводы обеих пар линеек будут сняты:с ограничения при смене командь в одной, из систем управления, обеспечив при этом возможность любых режимов раздельного и согласованного перемещения. .
Схема продолжает функционировать в полном соответствии е приведенным описанием и в частных случаях,- когда линейки расположены симметрично относительно оси прокатки, или когда, одна .пара лннеек находится по осевой линии прокатки. До тех пор, пока расстояние между линейками пре. вышает минимальное заданное значение, в выходной цепи усилителей 3 и обратной связи ИЗУ действует положительное опорное напряжение,; как только расстояние достигает минимума, опорное .напряжение снимается, приводы обеих линеек тормозятся.
При подаче на вход системы команды на расхбждение линеек, выражаемой сигналом отрицательной полярности., комплекс сигналов, действующих на входе усилителей
3и 4 тот же, что и при команде на сближение;
Результирующий сигнал на входе усилителей 3 имеет отрицательное значение и создает.в обратной связи ИЗУ опорное напряжение положительной полярности. Результирующий сигнал на входе усилителей
4имеет положительное значение и coздaet в обратной связи опорное напряжение отрицательной полярности, действующее на всем пути перёмещения линеек до крайнего рабо чего положения. - FTpVi достижении линeйkaми крайнего рабочего положения, результи-. рующий сигнал на выходе усилителей 4 становится равным нулю, опорное напряжение в его цепи снимается, ИЗУ закорачивается и привод останавливается. Снятие- ИЗУ с ограничения обеспечивается без дополнительных си;-налов путем подачи команды на обратное, в данном случае, уже встречное движение, поданный при этом на вход .ИЗУ положительный сигнал через обратную
связь ИЗУ не проходит из-за диода в выходной цепи усилителей 4, ИЗУ действует в своей основной функции, вырабатывая сигнал задания. Таким образом, в то время,
,,как сигнал отрицательной полярности (на расхождение линеек) был. заперт, сигнал положительной полярности (на сближение линеек) проходит, обеспечивая движение механизма.. . Схема может использоваться и в систе, мах,управления других механизмов, имеющих .юремещение в двух противоположных, направлениях этих перемещений.
.Предлагаемое устройство позволяет повысить надежность работы благодаря тому, что обеспечивает выработку .команд на ускорение и торможение привода автоматически В; зависимости лищь от фактического пространственного положения механизмов. независимо отвозможнЫХ ошибочных команд, а также, благодар.я тому, что переключения направлений перемещения механизмов выполняются бесконтактно.
. Формула изобретения
.
Узел слежения и ограничения пути механизма в автоматической системе управления линейками манипуляторов блюминга, содержащий в Хаждом канале системы
.управления левой и правой линейками йнТегро-задаюш ее устройство, два регулируемых усилителя с однополярной релейной характе|)истикой, следящий сельсин-датчик на валу ме)анизма и фазо-выпрямительное. устройство, отличающийся тем, что, с целью повышения надежности, выходы сельсиновдатчиков соединены - через фазо-выпрямительные устройства с входами первых усилителей обоих кана;)10в, вторые входы этих усилител ей соединены с, выходами фа-i
.зо-выпрямительных устройств противоположных каналов, вход .вторых усилителей соединены с первыми входами первых усилителей, втЪрой выход второго усилителя каждого канала соединён с входом интегрозадающего устройства, вь1ход которого соединен с вторым выходом первого усилителя, в цепь обратной интегро-задающего устройства встречно-параллельно введены последовательно соединенные диоды и резисторы, г|ричем к точкам соединения дио.дов и резисторов подсоединены .первые выходы.; усилителей.
Источники информации, принятые во внимание при экспертизе 1.-Электропривод и автоматизация блюминга 1300 Западно-Сибирского метзавода. ВНИИэлектропривод, Технический проект ОЛА.082707,1967.
-2. Электропривод регулируемых механизмов блюминга 1500 Нижнё-Тагильского меткомбината СО ГПИ ТПЭП, т. 3-1, ц. 1; 1973..
