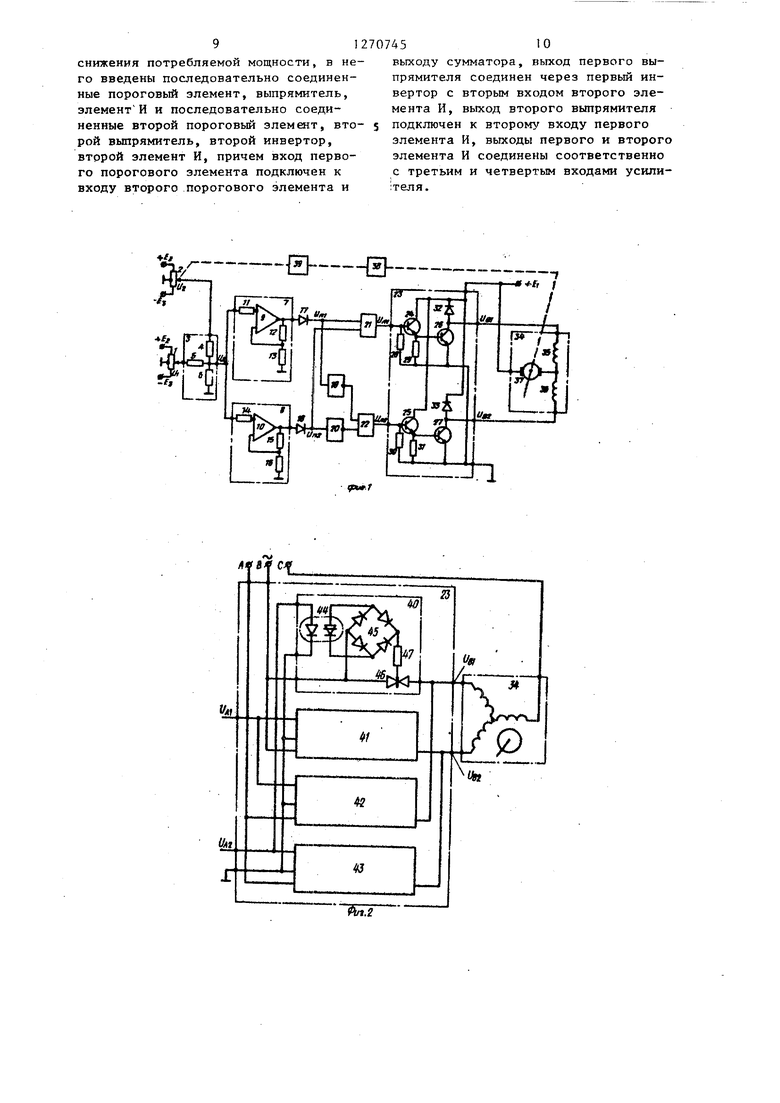
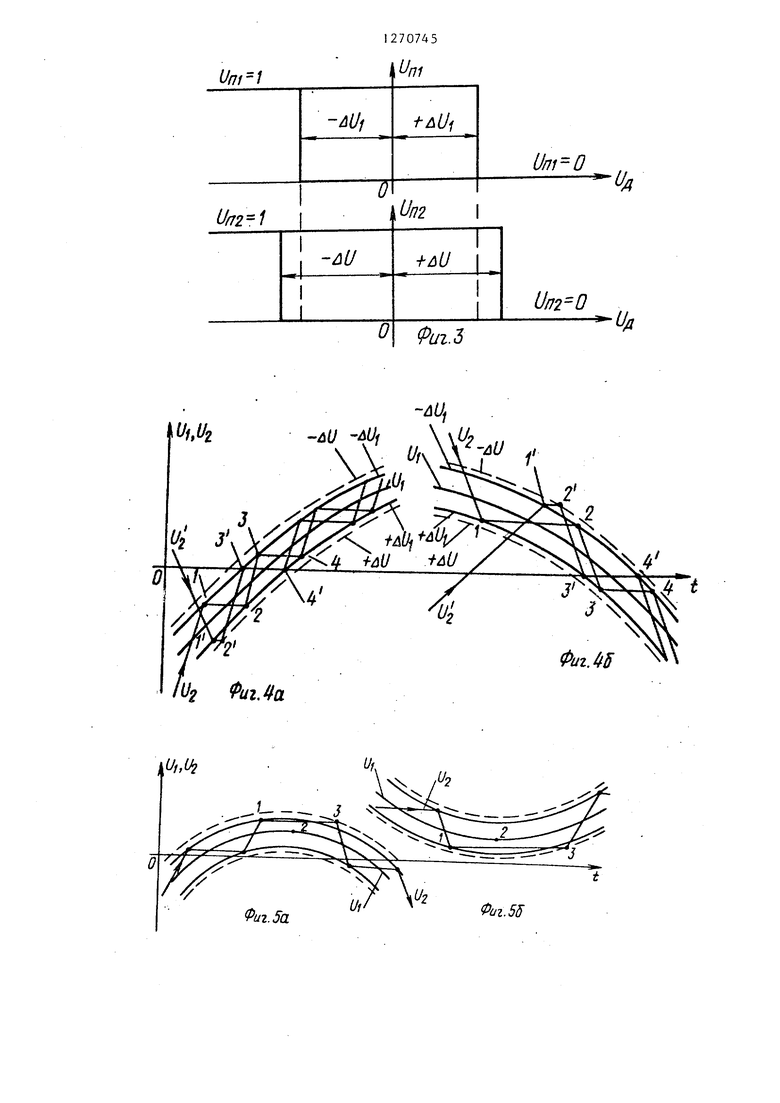
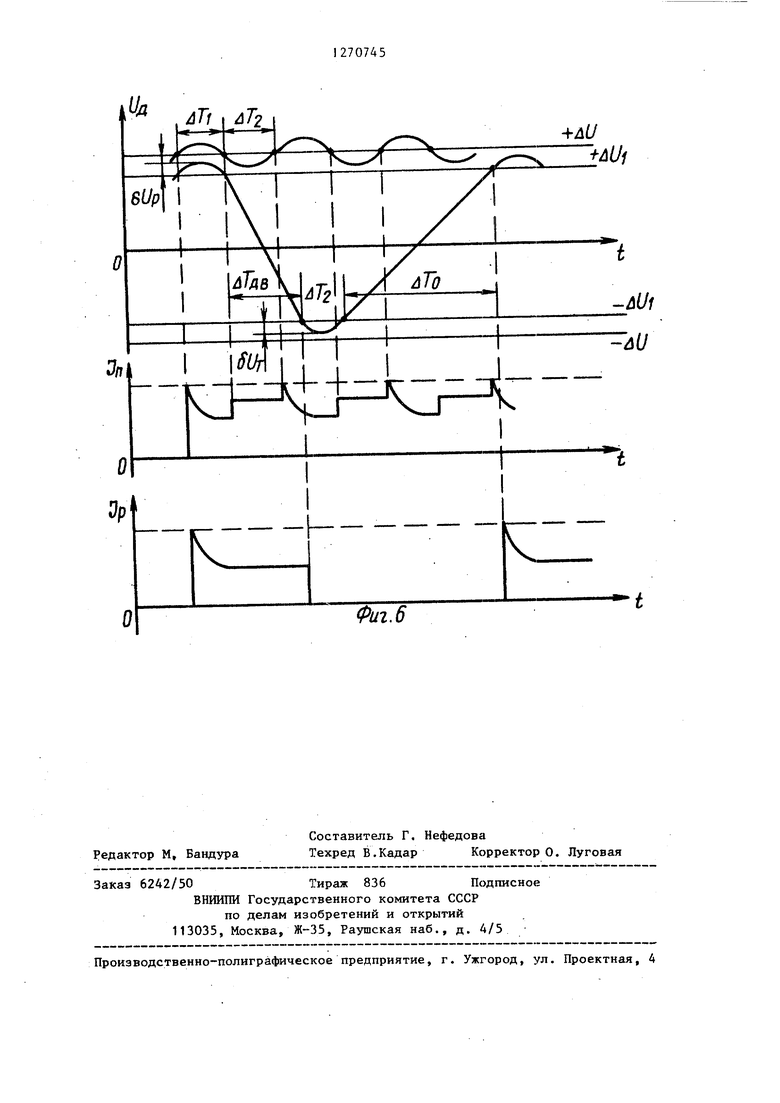
t Изобретение относится к автомати ке и может быть использовано в следящих системах, где в качестве исполнительного элемента используется двигатель постоянного тока либо трехфазный асинхронный двигатель. , Целью изобретения является увеличение ресурса работы привода и сниж ние потребляемой мощности. На фиг. 1 показана блок-схема ел дящего привода с исполнительным двигателем постоянного тока последо вательного возбуждения; на фиг. 2 схема усилителя для трехфазного аси хронного двигателя; на фиг. 3 -- ста тические характеристики пороговых элементов с петлей гистерезиса (с последовательно включенными диодами); на i фиг.Аа i и 46 - временные диаграммы отработки следящей системой соответственно монотонно возрас тающего и монотонно убывающего воздействия (с учетом отработки началь ного рассогласования); на фиг,, 5а и -56 - временные диаграммы отработки следящей системой управляюв аго воздействия при переходе его от воз растания к убыванию и наоборот; на фиг. 6 - временные диаграммы, иллюстрирующие число включений электродвигателя и потребляемый ток в предлагаемом следящем приводе по сравнению с прототипом. Следящий привод (фиг.1) содержит задатчик 1 и датчик 2 обратной связи, которые могут быть выполнены в виде потенциометров, сумматор 3, выполненный на резисторах 4, 5 и б первый 7 и второй 8 пороговые элементы, выполненные на операционных усилителя 9 и 10 и резисторах li te, первый 17 и второй 18, выпрямители, первый 19 и второй 20 инверто ры, первый 21 и второй 22 элементы И, усилитель 23, выполненный на тра зисторах 24-27, резисторах 28-31 и диодах 32 и 33, двигатель 34 постоянного тока с обмотками возбуждения 452 35, 36 и якорем 37, редуктор 38 и объект управления 39. На фиг. 2 приведена схема усилителя 23, предназначенного для использо вания с трехфазным асинхронньм двигателем 34, содержащего 4 одинаковых ключевых элемента 40-43, каждый из которых, например, может быть выполнен на оптроне 44, диодном вьтря мительном мосте 45, семисторе 46 и резисторе 47. Потенциометр 1 служит для введе ния задающего воздействия (требуемо го углового перемещения). Потенциометр 2, жестко связанный с объектом управления 39, является преобразователем угла поворота в напряжение постоянного тока. Напряжение с потенциометров 1 и 2 поступает на входы сумматора 3,, выполненного на резисторах 4, 5 и 6, на выходе которого вырабатывается разность Uj , которая пропорциональна угловому рассогласованию задающей и исполнительной осями. Напряжение U поступает на входы пороговых устройств 7 и 8 с петлей гистерезиса, которые вьшолнены на операционных усилителях 9 и 10. Пороги срабатывания определяются для них соотнощением сопротивлений резисторов 12и 13, 15 и 16. Для подачи на входы логических элементов только поло5вительных уровней напряжения служат вьшрямительные элементы 17 и 18. Статические характеристики пороговых элементов 7 и В (вместе с вьтрямительными элементами 17 и 18) приведены на фиг.З. Входные напряжения U и U логических элементов (инверторы 19 и 20 и элементы типа И 21 и 22), соединенных по схеме фиг. 1, и выходные напряжения Ы и Ид могут принимать значения логического нуля и логической единицы, взаимное соответствие которых приведено в таблице (зместе с указанием требуемого .направления вращения ротора двигателя).
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий привод | 1986 |
|
SU1339489A1 |
| Электрогидравлический следящий привод | 1984 |
|
SU1245768A1 |
| Следящая система | 1977 |
|
SU696407A1 |
| Трехканальная следящая система | 1989 |
|
SU1716479A1 |
| Двухканальная система управления телескопом | 1983 |
|
SU1171752A1 |
| Следящая система | 1982 |
|
SU1081622A1 |
| Следящий электропривод | 1991 |
|
SU1833828A1 |
| Следящий привод для компенсации ки-НЕМАТичЕСКиХ пОгРЕшНОСТЕй МЕХАНизМОВ | 1979 |
|
SU817959A1 |
| Следящая система | 1982 |
|
SU1179264A1 |
| Следящая система | 1978 |
|
SU771616A1 |
Изобретение относится к автоматике и может быть использовано в следящих системах, где в качестве исполнительного элемента используется двигатель .постоянного тока либо трехфазный асинхронный двигатель. Цель изобретения - увеличение ресурса работы привода и снижение потребляемой мощности. Поставленная цель достигается тем, что в устройство введена цепь коррекции, учитывающая инерционность нарастания скорости исполнительного механизма, что позволяет уменьшить частоту включения двиi гателя и снизить ;потребление энергии , 6 ил. (Л с
гателя
стрелке .стрелки . 3 Сигналы Ид н ( с выходов первого и второго элементов И 21 и 22 посту пают на входы усилителя 23, в котором в качестве первого каскада использованы эмиттерные повторители, выполненные на транзисторах 24, 25 и резисторах 28-31. Силовой каскад усилителя выполнен на транзисторах 26, 27 и диодах 32, 33, шунтирующих обмотки двигателя 34, вал которого через редуктор 38 соединен с объектом управления 39 и движком- датчика 2 обратной связи. Диоды 32 и 33 защ щают транзисторы 26 и 27 от перенапряжений, возникающих при их закрывании из-за наличия индуктивности о моток двигателя. При поступлении .сигнала Uy( 1 от крываются транзисторы 24 и 26 и по обмотке возбуждения 35 и якорю 37 двигателя 34 протекает ток, приводящий его во вращение по часовой стрелке. При появлении сигнала открываются транзисторы 25 и 27 и п обмотке возбуждения 36 и якорю 37 двигателя протекает ток,приводящий его во вращение против часовой стре ки. .В следящем приводе может быть применен другой тип двигателя - тре фазный асинхронный, при этом все элементы схемы фиг. 1 остаются без изменения, кроме усилителя 23. Усилитель для этого типа двигателя может быть реализован по схеме, приве денной на фиг. 2. Он содержит 4 оди наковых ключевых элемента 40-43. Как известно, для изменения направления вращения трехфазного асинхрон ного двигателя достаточно поменять местами две фазы сети, подходящие к любым двум выводам трехфазной обмотки двигателя. В данной схеме при открывании ключевых элементов 41 н 42 вращение ротора двигателя происходит по часовой стрелке, при открывании ключевых элементов 40 и 43 против часовой стрелки. Ключевой элемент работает следую щим образом. При протекании тока по входной цепи оптрона 44 сопротивление динистора, находящегося в его выходной цепи и шунтирукядего диагональ диодного выпрямительного моста 45, становится минимальным, и выпрямленное напряжение фазы через ограничительный резистор 47 поступает 454 на управляющий электрод симистора 46. Открывание симистора 46 будет происходить в начале каждого пблупериода напряжения фазы. При прекращении тока через входную цепь оптрона 44 динистор оптрона и симистор 46 остаются открытыми до момента, пока очередная полуволна переменного напряжения не уменьшится до нуля, после чего происходит закрывание симистора. Следящий привод работает следующим образом. Процесс слежения начинается с отработки начального рассогласования , которое может находиться во всей области допустимых значений Ид . Условно эту область можно разбить на три участка: 1, 2. iU i + iU 3. . В первом случае (см.фиг.3 и п.З таблицы)ротор двигателя, вращаясь по часовой стрелке,будет перемещать исполнительную ось,-пока U не достигнет величины +йи, J где произойдет отключение двигателя (п.2 таблицы) . Во втором случае (фиг.З и п.2 таблицы) двигатель неподвижен. В третьем случае (фиг.З и п.4 таблицы) ротор двигателя, вращаясь против часовой стрелки, перемещает исполнительную ось, пока Ьд не достигнет величины -ai/, где происходит отключение двигателя (см.фиг.З и п.1. таблицы). Таким образом, вне зависимости от величины и знака начального рассогласования система отработает его до величины ±лУ,. Дальнейший процесс слежения происходит -следующим образом. Рассмотрим случай, когда управляющее воздействие U монотонно возрастающее. Как быпо показано, после отработки некоторого начального рассогласования, в зависимости от его знака, выключение двигателя произойдет при достижении Кд величины , (точка 1 фиг. 4а) либо величины дЫ;, (точка 1 фиг. 4а). Ротор двигателя и исполнительная ось будут неподвижны до тех пор, пока ь(д не достигнет величины +ди, (точка 2 фиг. 4а) либо iU (точка 2 фиг. 4а). Здесь прои-г зойдет включение двигателя (см.фиг.З и п.4 таблигсы) и ротор двигателя вращаясь против часовой стрелкиj перемещает исполнительную ось, пока д не достигнет величины - jU, (точки 3 и 3 фиг. 4а), где двигатель отключается (см.фиг.3 и П.1 таблицы) и исполнительная ось остается неподвижной, пока Рд снова не достигнет величины /iU (точки 4 и 4 фиг. 4а) . Далее процесс будет аналогичным: включение двигателя будет осуществляться при , а отключение при + AU Исключение составляет точка 2 фиг.4л1 где Уд достигает значения iU , что приводит к изменению направления вра щения ротора (после отработки начальнего рассогласования) при его последующих включениях. Рассмотрим случай, когда управляю щее воздействие монотонно убывающее. В зависимости от знака начального ра согласования после его отработки выключение двигателя произойдет при достижении Уд величины -лИ (точка 1 фиг.4|) либо величины - ли (точка 1 фиг. 4). Ротор двигателя будет неподвижен, пока не достигнет в«шичи ны - 1( (точка 2 фиг.45) либо-ли(точка 2 фиг.4(5). Здесь произойдет включение двигателя (см.фиг.3 и п.З таблицы) и poTopj вращаясь по часовой стрелке, перемещает исполнительную ось, пока Уд не достигнет величины А Ч (точки 3 и Зфиг.4§), где двигатель отключается (см.фиг.3 и п„1 габ лицы) и исполнительная ось остается неподвижной, пока U не достигает сн ва величины-AU(точки 4 и 4фиг,.4(5) . Далее процесс будет аналогичен;: вклю чение двигателя происходит при , , а отключение при U . Исключение составляет точка 2 где Ид достигает величины -aU , что приводит к изменению направления вра щения ротора (после отработки началь ного рассогласования) при его послед ющих включениях. При переходе управляющего воздействия от участка монотонного возрастания к монотонному убыванию (фиг.Зй) 50 чины
работа следящего привода происходит следующим образом. Пусть точка 1 на фиг. 5и последняя на участке 1чонотонного возрастания U , где произошло отключение двигателя (см.фиг.3 и П.1 таблицы). Управляющее воздействие, достигнув своего максимального значения в точке 2 (фиг, 5а ), начи1
га. Очевидно, что в течение времени Д Т вследствие инерционности системы нарастание скорости исполнительной оси до некоторого номинального значения будет происходить с запаздыванием. Поэтому в течение времени А т величина U д будет превьшать значение порога, где произошло вклю456нает монотонно убывать. Исполните.тгьная ось будет неподвижной, пока Ui не достигнет величины ALI (точка 3 фиг. 5а ), где произойдет включение двигателя и вращение ротора будет происходить по часовой стрелке (см. фиг. 3 и п.З таблицы). В дальнейшем отработка будет происходит аналогично отработке на участке монотонного убывания. При переходе управляющего воздействия от участка монотонного убывания к монотонному возрастанию (фиг.55) отработка его происходит следующим образом. Пусть точка 1 на фиг. 5$ последняя на участке монотонного убывания, где произойдет отключение двигателя (см.фиг.3 и п.2 таблицы). Управляющее воздействие достигает своего минимума в точке 2 (фиг. 5S) и затем начинает монотонно возрастать. Исполнительная ось будет неподвижной, пока U,), не достигнет величины + i U , где произойдет включение двиТа еля с вращением роторэ против часовой стрелки (см.фиг.3 и п.4 таблицы) . В дальнейшем отработка управляющего воздействия будет происходить аналогично отработке на участке монотонного возрастания. Таким образом, рассматриваемый следящий привод при соответствующих энергетических возможностях способен отработать любой тип изменяющегося управляющего воздействия с максимальной ошибкой i ли. Кроме одинаковости точностных характеристик предлагаемого следящего привода и прототипа предложенная схема и алгоритм ее работы обеспечивают при прочих равных условиях минимум потребления тока, а также минимальное число включений двигателя в единицу времени, что повышает ресурс работы двигателя и всего привода в целом по сравнению с прототипом. Так, при изменяющемся управляющем воздействии U, двигатель включается в момент превышения велирассогласования заданного поро7чение двигателя, на величину (fUp (фиг. 6). Аналогично при выключении двигателя вследствие инерционно ти изменение скорости исполнительной оси до нуля будет происходить с запаздьгеанием. Поэтому в течение не которого времени лТд величина рассог ласования будет меньше величины пор га, при котором произошло отключение двигателя, на величину fUy (фиг,6). Очевидно, что значения Up и для прототипа и рассматриваемого привода при прочих равных усло виях будут одинаковы. Отличие состо tiT в том, что включение двигателя в схеме прототипа происходит при превьшении величины рассогласования порога iU, а в предлагаемой схеме порога AU, а отключение двигателя в схеме прототипа происходит при до стижении величины рассогласования того же порога А U ,. а в предлагаемой схеме величины - lU (фиг.6). Та ким образом, частота включения двиг теля в схеме прототипа составляет f V. а в предлагаемой схеме 1 г лТ,т,,.АТ,.АТ/ где лТ - время, в течение которо го величина рассогласования изменяется до - л u ; Т, - время, в течение которо го исполнительная ось неподвижна, а величина рассогласования изменяется от 4Ц до 4 дЫ вследствие изменения управляющего воздействия В предлагаемой схеме величина lU определяется из условия ,, где (Уи - наибольшая из величин tfU или . Как правило, в реальных системах «fU значительно меньше величины дЦ , следовательно, л V дТ « и поз тому f У in . На фиг. 6 приведены временные диаграммы потребления тока двигателя в схеме прототипа „ и в рассматриваемой схеме Зр , соответствующие отработке системами управляю458щего воздействия. Из них видно, что в течение времени Tj, когда якорь двигателя в схеме прототипа неподвижен, через двигатель все же протекает ток, так как силовые тиристоры попеременно открываются и закрьгааются. Среднее значение тока на этом участке диаграммы определяется периодом импульсов, поступающих.с генератора, а также соотношением активных и индуктивных сопротивлений обмоток двигателя. Таким образом, потребление тока происходит в течение всего времени работы системы. Из диаграммы для тока р в предлагаемой схеме (фиг. 6) видно, что в течение времени , когда исполнительная ось неподвижна, двигатель не потребляет тока. Следовательно, при f средний ток, потребляемый двигателем от одного включения до другого, будет меньше, чем средний ток, потребляемый за тот же период в схеме прототипа. Проведенные испытания. макетных образцов показали, что в зависимости от скорости изменения управлягадего воздействия и величины устанавливаемого порога срабатывания fдц среднее значение потребляемого тока уменьшается на 25-50%, а частота включения исполнительного двигателя уменьшается в 2-3 раза по сравнению с прототипом. Формула изобретения Следящий привод, содержащий электродвигатель, сумматор, редуктор, усилитель, инвертор, задатчик и датчик обратной связи, подключенные соответственно -к первому и второму входам сумматора, первый и второй выходы усилителя соединены соответственно с первым и вторым выводами обмотки возбуяодения электродвигателя, якорь которого подключен к положительному выводу источника питания и первому входу усилителя, соединенного вторым входом с отрицательным выводом источника питания, вал электродвигателя кинематически соединен через редукор с движком датчика обратной свяи и объектом управления, отлиающийся тем, что, с целью величения ресурса работы привода и 9 снижения потребляемой мощности, в не го введены последовательно соединенные пороговый элемент, выпрямитель, элемент И и последовательно соединенные второй пороговый элемент, вто рой выпрямитель, второй инвертор, второй элемент И, причем вход первого порогового элемента подключен к входу второго порогового элемента и
/ 4510 выходу сумматора, выход первого выпрямителя соединен через первый инвертор с вторым входом второго элемента И, выход второго выпрямителя подключен к второму входу первого элемента И, выходы первого и второго элемента И соединены соответственно с третьим и четвертым входами усили;теля.
-AUj
2
Uni
AUi
Un
,Un2 , Г/ j72 - Фиг.6 М
| Следящая система | 1980 |
|
SU1007082A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 0 |
|
SU311248A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
