(54) МАНИПУЛЯТОР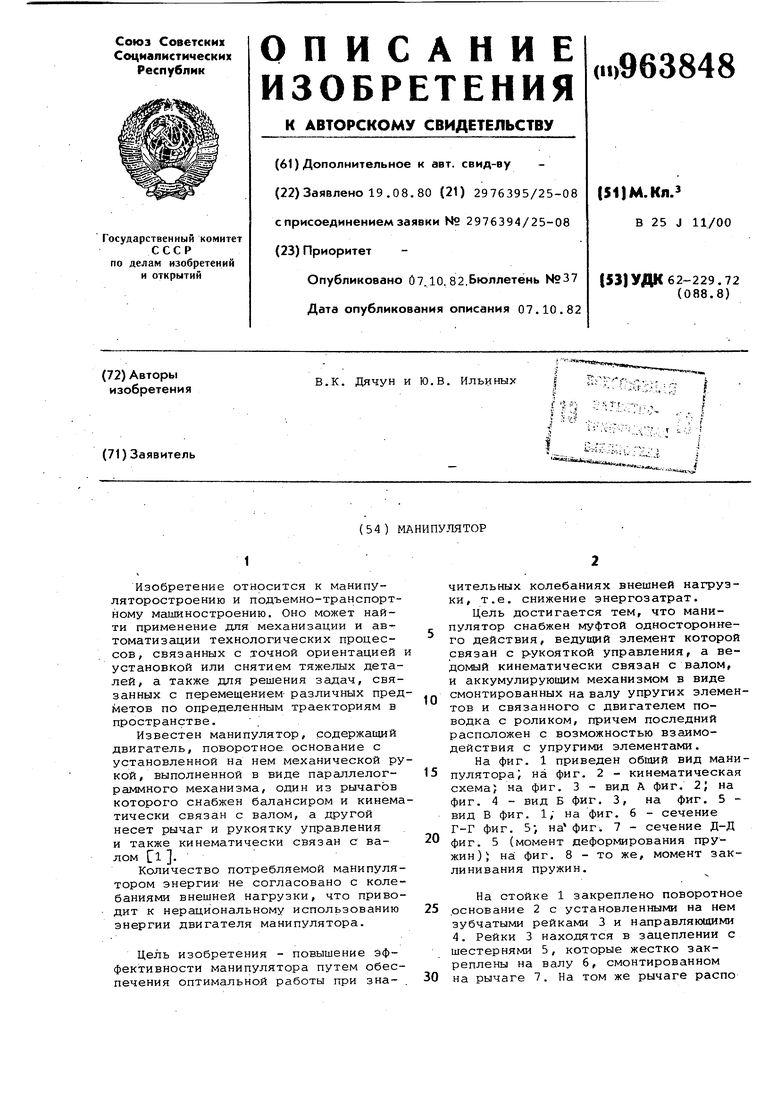
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1981 |
|
SU1002146A2 |
| Манипулятор | 1980 |
|
SU908589A1 |
| Манипулятор | 1979 |
|
SU814722A2 |
| Манипулятор | 1978 |
|
SU779065A1 |
| КОРОБКА ПЕРЕДАЧ ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2008230C1 |
| Устройство для затяжки и открытия контактных зажимов алюминиевых электролизеров | 1978 |
|
SU751841A1 |
| Двухместное захватное устройство | 1986 |
|
SU1316815A1 |
| ТРОЛЛЕЙБУС С ЧАСТИЧНОЙ НЕЗАВИСИМОСТЬЮ ОТ КОНТАКТНОЙ СЕТИ | 2012 |
|
RU2493027C1 |
| Манипулятор | 1978 |
|
SU679385A1 |
| Силовая установка транспортного средства | 1989 |
|
SU1760989A3 |
Изобретение относится к манипуляторостроению и подъемно-транспортному машиностроению. Оно может найти применение для механизации и автоматизации технологических процессов, связанных с точной ориентацией и установкой или снятием тяжелых деталей, а также для решения задач, связанных с перемещением- различных предметов по определенным траекториям в пространстве.
Известен манипулятор, содержащий двигатель, поворотное основание с установленной на нем механической рукой, выполненной в виде параллелограммного механизма, один из рычагов которого снабжен балансиром и кинематически связан с валом, а другой несет рычаг и рукоятку управления и также кинематически связан с валом 1 .
Количество потребляемой манипулятором энергии- не согласовано с колебаниями внешней нагрузки, что приводит к нерациональному использованию энергии двигателя манипулятора.
Цель изобретения - повышение эффективности манипулятора путем обеспечения оптимальной работы при зна- .
чительных колебаниях внешней нагрузки, т.е. снижение энергозатрат.
Цель достигается тем, что манипулятор снабжен муфтой одностороннего действия, ведущий элемент которой связан с р-укояткой управления, а ведомый кинематически связан с валом, и аккумулирующим механизмом в виде смонтированных на валу упругих элемен10тов и связанного с двигателем поводка с роликом, причем последний расположен с возможностью взаимодействия с упругими элементами.
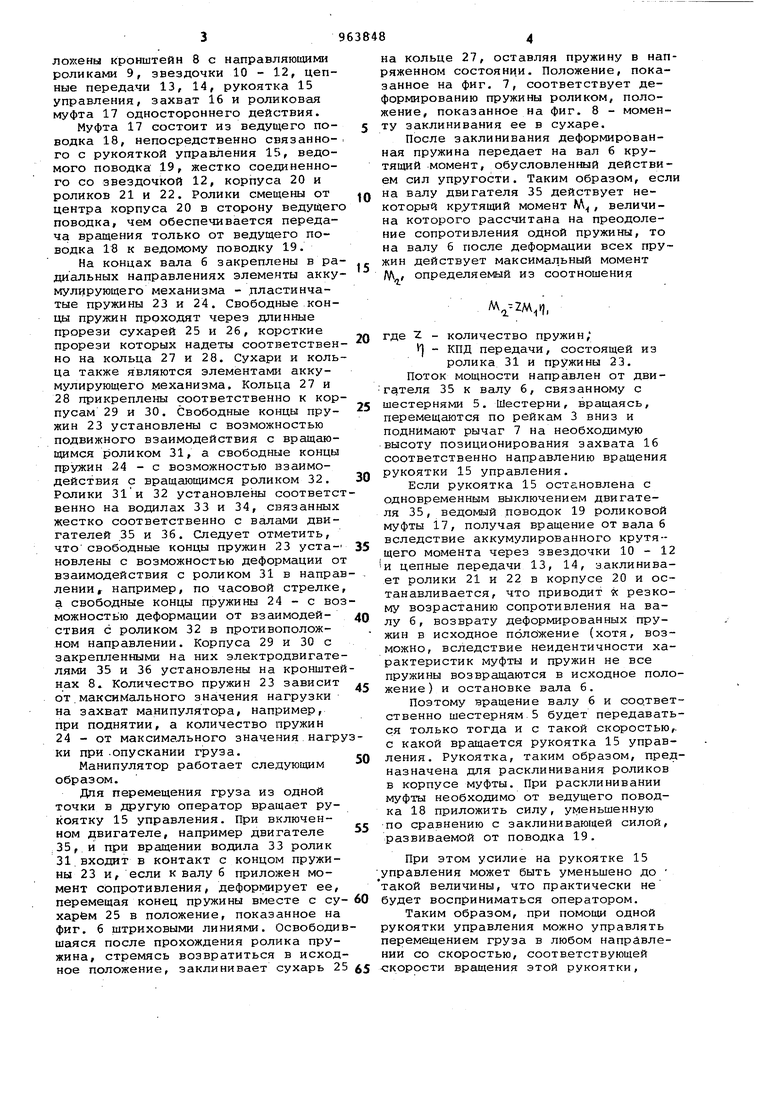
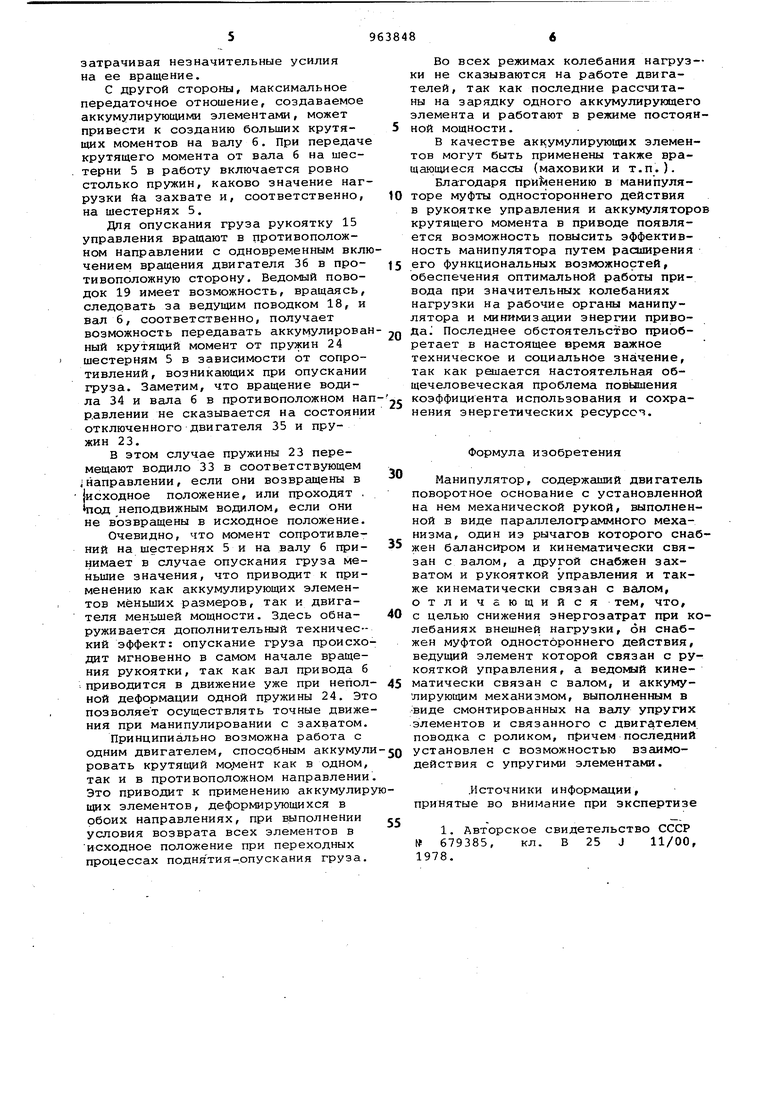
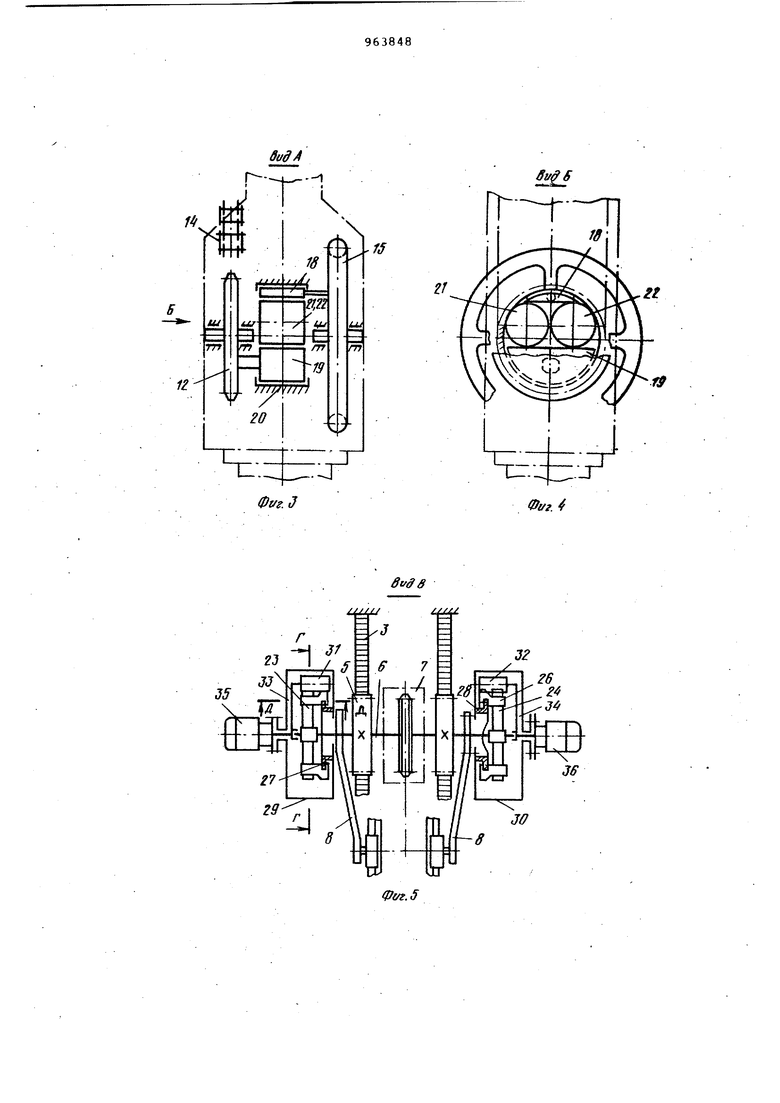
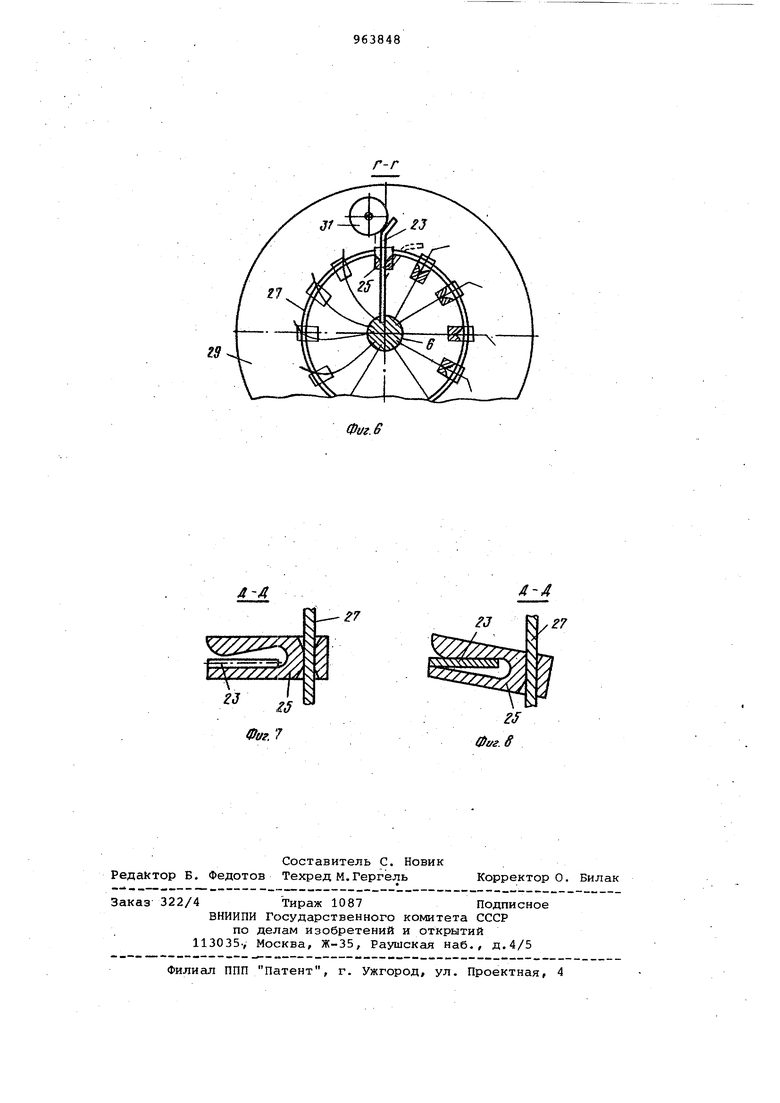
На фиг. 1 приведен общий вид мани15пулятора на фиг. 2 - кинематическая схема; на фиг. 3 - вид А фиг. 2; на фиг. 4 - вид Б фиг. 3, на фиг. 5 вид В фиг. 1; на фиг. 6 - сечение Г-Г фиг. 5, на фиг 7 - сечение Д-Д фиг. 5 (момент деформирования пружин); на фиг. 8 - то же, момент заклинивания пружин.
На стойке 1 закреплено поворотное 25 основание 2 с установленными на нем зубчатыми рейками 3 и направляющими 4. Рейки 3 находятся в зацеплении с шестернями 5, которые жестко закреплены на валу 6, смонтированном 30 на рычаге 7. На том же рычаге распо ложены кронштейн 8 с направляющими роликами 9, звездочки 10 - 12, цепные передачи 13, 14, рукоятка 15 управления, захват 16 и роликовая муфта 17 одностороннего действия. Муфта 17 состоит из ведуп;его поводка 18, непосредственно связанного с рукояткой управления 15, ведомого поводка 19, жестко соединенного со звездочкой 12, корпуса 20 и роликов 21 и 22. Ролики смещены от центра корпуса 20 в сторону ведущег поводка, чем обеспечивается передача вращения только от ведущего поводка 18 к ведомому поводку 19. На концах вала 6 закреплены в ра диальных направлениях элементы акку мулирующего механизма - пластинчатые пружины 23 и 24. Свободные концы пружин проходят через длинные прорези сухарей 25 и 26, короткие прорези которых надеты соответствен но на кольца 27 и 28. Сухари и коль ца также являются элементами аккумулирующего механизма. Кольца 27 и 28 прикреплены соответственно к кор пусам 29 и 30. Свободные концы пружин 23 установлены с возможностью подвижного взаимодействия с вращающимся роликом 31, а свободные концы пружин 24 - с возможностью взаимодейстгвия с вращающимся роликом 32. Ролики 31 и 32 установлены соответс венно на водилах 33 и 34, связанных жестко соответственно с валами двигателей 35 и 36. Следует отметить, чтосвободные концы пружин 23 установлены с возможностью деформации о взаимодействия с роликом 31 в напра лении f например, по часовой стрелке а свободные концы пружины 24 - с во можностью деформации от взаимодействия с роликом 32 в противоположном направлении. Корпуса 29 и 30 с закрепленными на них электродвигате лями 35 и 36 установлены на кронште нах 8. Количество пружин 23 зависит от.максимального значения нагрузки на захват манипулятора, например, при поднятии, а количество пружин 24 - от максимального значения нагр ки при .опускании груза. Манипулятор работает следующим образом. Для перемещения груза из одной точки в другую оператор вращает рукоятку 15 управления. При включенном двигателе, например двигателе ,35, и при вращении водила 33 ролик 31.входит в контакт с концом пружины 23 и, если к валу 6 приложен момент сопротивления, деформирует ее, перемещая конец пружины вместе с су харём 25 в положение, показанное на фиг. 6 штриховыми линиями. Освободив шаяся после прохождения ролика пружина, стремясь возвратиться в исход ное положение, заклинивает сухарь 2 на кольце 27, оставляя пружину в напряженном состоянии. Положение, показанное на фиг. 7, соответствует деформированию пружины роликом, положение, показанное на фиг. 8 - моменту заклинивания ее в сухаре. После заклинивания деформированная пружина передает на вал 6 крутящий момент, обусловленный действием сил упругости. Таким образом, если на валу двигателя 35 действует некоторый крутящий момент W, величина которого рассчитана на преодоление сопротивления одной пружины, то на валу 6 после деформации всех пружин действует максимальный момент АЛ, определяемый из соотношения , где Z. - количество пружин, - КПД передачи, состоящей из ролика 31 и пружины 23. Поток мощности направлен от двигателя 35 к валу 6, связанному с шестернями 5. Шестерни, вращаясь, перемещаются по рейкам 3 вниз и поднимают рычаг 7 на необходимую высоту позиционирования захвата 16 соответственно направлению вращения рукоятки 15 управления. Если рукоятка 15 остановлена с одновременным выключением двигателя 35, ведомый поводок 19 роликовой муфты 17, получая вращение от вала 6 вследствие аккумулированного крутя-щего момента через звездочки 10 - 12 и цепные передачи 13, 14, заклинивает ролики 21 и 22 в корпусе 20 и останавливается, что приводит « резкому возрастанию сопротивления на валу 6, возврату деформированных пружин в исходное пбложение (хотя, возможно, вследствие неидентичности характеристик муфты и пружин не все пружины возвращаются в исходное положение) и остановке вала 6. Поэтому вращение валу 6 и соответственно шестерням,5 будет передаваться только тогда и с такой скоростью,, с какой вращается рукоятка 15 управления. Рукоятка, таким образом, предназначена для расклинивания роликов в корпусе муфты. При расклинивании муфты необходимо от ведущего поводка 18 приложить силу, уменьшенную по сравнению с заклинивающей силой, развиваемой от поводка 19. При этом усилие на рукоятке 15 правления может быть уменьшено до акой величины, что практически не удет восприниматься оператором. Таким образом, при помощи одной укоятки управления можно управлять еремещением груза в любом напрАвлеии со скоростью, соответствующей корости вращения этой рукоятки.
затрачивая незначительные усилия на ее вращение.
С другой стороны, максимальное передаточное отношение, создаваемое аккумулирующими элементами, может привести к созданию больших крутя- 5 щих моментов на валу б. При передаче крутящего момента от вала б на шестерни 5 в работу включается ровно столько пружин, каково значение нагрузки йа захвате и, соответственно, 10 на шестернях 5.
Для опускания груза рукоятку 15 управления вращают в противоположном направлении с одновременным включением вращения двигателя 36 в про- 5 тивоположную сторону. Ведомый поводок 19 имеет возможность, вращаясь, следовать за ведущим поводком 18, и вал б, соответственно, получает возможность передавать аккумулирован- jr. ный крутящий момент от пружин 24 шестерням 5 в зависимости от сопротивлений, возникающих при опускании груза. Заметим, что вращение водила 34 и вала 6 в противоположном нап-. р.авлении не сказывается на состоянии отключенного двигателя 35 и пружин 23.
В этом случае пружины 23 перемещают водило 33 в соответствующем направлении, если они возвращены в {исходное положение, или проходят , под неподвижным водилом, если они не возвращены в исходное положение.
Очевидно, что момент сопротивлений на шестернях 5 и на валу б при- 35 нимает в случае опускания груза меньшие значения, что приводит к применению как аккумулирующих элементов меньших размеров, так и двигателя меньшей мощности. Здесь обна- 40 руживается дополнительный технический эффект: опускание груза происходит мгновенно в самом начале вращения рукоятки, так как вал привода б приводится в движение уже при непол- 45 ной деформации одной пружины 24. Это позволяет осуществлять точные движения при манипулировании с захватом.
Принципиально возможна работа с одним двигателем, способным аккумули-5д ровать крутящий как в одном, так и в противоположном направлении. Это приводит к применению аккумулирующих элементов, деформирующихся в обоих направлениях, при выполнении ее условия возврата всех элементов в исходное положение при переходных процессах поднятия-.опускания груза.
Во всех режимах колебания нагруз- ки не сказываются на работе двигателей, так как последние рассчитаны на зарядку одного аккумулирующего элемента и работают в реясиме постоянной мощности.
В качестве аккумулирующих элементов могут быть применены также вращающиеся массы (маховики и т.п.).
Благодаря применению в манипуляторе муфты одностороннего действия в рукоятке управления и аккумуляторо крутящего момента в приводе появляется возможность повысить эффективность манипулятора путем расширения его функциональных вoз южнocтeй, обеспечения оптимальной работы привода при значительных колебаниях нагрузки На рабочие органы манипулятора и минимизации энергии привода Последнее обстоятельство приобретает в настоящее время важное техническое и социальное значение, так как рацается настоятельная общечеловеческая проблема повышения коэффициента использования и сохранения энергетических ресурсст.
Формула изобретения
Манипулятор, содержащий двигатель поворотное основание с установленной на нем механической рукой, выполненной в виде параллелограммного механизма, один из рычагов которого снабжен балансиром и кинематически связан с валом, а другой снабжен захватом и рукояткой управления и также кинематически связан с валом, отличающийся тем, что, с целью снижения энергозатрат при колебаниях внешней нагрузки, он снабжен муфтой одностороннего действия, ведущий элемент которой связан с рукояткой управления, а ведомый кинематически связан с валом, и аккумулирующим механизмом, выполненным в виде смонтированных на валу упругих элементов и связанного с двигателем поводка с роликом, причем последний установлен с возможностью взаимодействия с упругими элементами.
.Источники информации, принятые во внимание при экспертизе
гш
1-
2В
29
I V / Р 25
/ -нh-f- р7
7 /
JJ/ .-.
Фиг. г
Г
36
13
Фог. 7
/J
