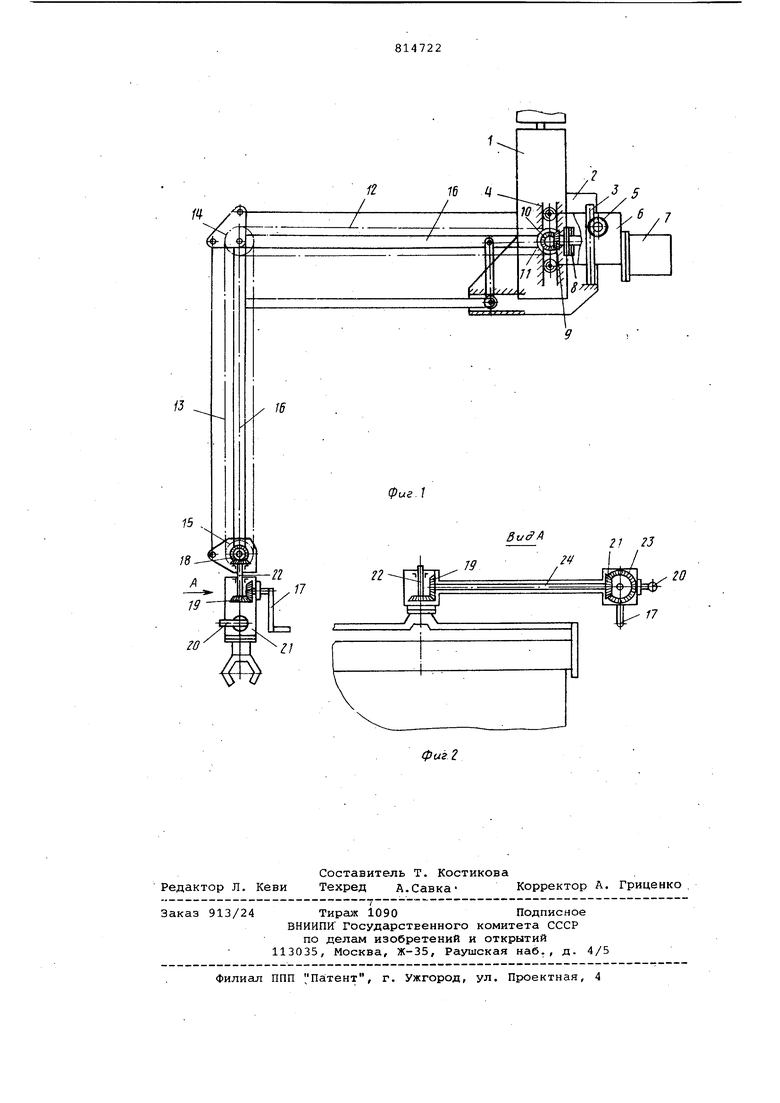
Изобретение относится к манипуляторостроению и подъемно-транспортному машиностроению и может найти применение для механизации и автоматизации технологических процессов, связанных с точной установкой и снятием тяжелых деталей. По основному авт. св. № 679385 известен манипулятор, содержащий по воротное основание с установленным на нем приводом, например двигателем с червячным самотормозящимся редуктором, рычаг, связанный с балансиром, захват и рукоятку управления. На осно вании манипу.1ятора установлены рейки редуктор смонтирован на рычаге, бысТ роходный вал редуктора кинематически связан с рукояткой управления посредством ценных передач и муфты, а тихоходный вал кинематически связан с рейками 1. Однако размещение приводной рукоят ки возле захвата и жесткое закрепление ее относительно звездочки цепной передачи сужает функциональные возможности манипулятора и снижает удобство управления при манипулировании с грузами, особенно крупногабаритными. Цель изобретения - расширение функциональных возможностей манипулятора и повышение удобства управления. Поставленная цель достигается тем, что манипулятор снабжен валом с установленными на его концах коническими колесами, кинематически связанными с рукоятками управления и привода и с звездочкой цепной передачи. На фиг, 1 изображен манипулятор, общий вид; на фиг. 2 - вид А на фиг. 1 (повернуто). Манипулятор содержит стойку 1, на которой закреплено поворотное основание 2 с установленными на нем рейками 3 и направляющими 4. Рейки 3 находятся в зацеплении с шестернями 5, жестко закрепленными на тихоходном валу червячного самотормозящегося редуктора б, установленного в направлянвдих 4. Быстроходный вал редуктора одним концом связан с двигателем 7, а другим концом с помотдью электромагнитной муфты 8, конических колес 9 и 10, звездочки 11, цепных передач 12 и 13 и звездочки 14 с приводной звездочкой 15. Звездочки 11, 14 и 15 и цепные передачи 12 и 13 .установлены на рычаге 16, шарнирно
связанном с редуктором б. Звездочка 15 связана с приводной рукояткой
17посрюдством конических передач
18и 19. Приводная рукоятка 17 и рукоятка 20 управления установлены в корпусе коробки 21 управления, имеющем возможность поворота относительно вала 22 передачи 18 и 19. Привод-ная рукоятка 17 связана звездочкой 15 с помсчдью конических передач 19
и 23 с возможностью поворота относительно вала (фиг. 2),
Манипулятор работает следующим образом.
Для перемеввения груза из одной точки в другую оператор, одной рукой держась за рукоятку 20 управления, манипулирует захватом, а другой рукой, вращая рукоятку 17, передает крутящий момент через конические передачи
19и 18 (или 23, 19 и 18) на звездочку 15, ас нее через звездочки 14 и 11 и цепные передачи 13 и 12 - на электромагнитную муфту 8, которая передает крутящий момент на быстроходный вал червячного самотормозящегося редуктора 6, в котором в зависимости от передаточного отношения червячной пары происходит умножение крутящего момента, передаваемого оператором. Шестерни 5, вращаясь, перемещаются по рейкам 3 вверх или вниз, в зависимости от направления вращения рукоятки 17, и поднимают или опускают рычаг 16 с редуктором б на необходимую высоту позиционирования захвата. Ручной привод дает возможность точно подвести захват к грузу, а возможность поворота коробки 21 управления относительно вгшов 22 и 24 создает дополнительные удобства при подводе захвата к грузу. После захвата груза оператор поворачивает рукоятку 20 управления вверх, электромагнитная муфта В при этом отключается и включается двигатель 7, который через редуктор передает крутящий момент на шестерни 5 и перемещает груз вверх. При повороте рукоятки управления вниз двигатель реверсируется, и груз опускается вниз. Для точной установки груза оператор ставит рукоятку 20 управления в нейтральное положение и, вращая рукоятку 17, устанавливает груз в нужную точку.
Формула изобретения
Манипулятор по авт.. св. I 679385, отличающийся тем, что, с целью расширения функциональных возможностей и повышения удобства управления, он снабжен валом с установленными на его концах коническими колесами, кинематически связанными с рукоятками управления и привода и с звездочкой цепной передачи. Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 679385, кл. В 25 J 11/00, 1978.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1980 |
|
SU908589A1 |
| Манипулятор | 1978 |
|
SU779065A1 |
| Манипулятор | 1978 |
|
SU679385A1 |
| Манипулятор с ручным управлением | 1978 |
|
SU664909A1 |
| Манипулятор | 1981 |
|
SU1002146A2 |
| Манипулятор | 1980 |
|
SU963848A1 |
| Устройство для затяжки и открытия контактных зажимов алюминиевых электролизеров | 1978 |
|
SU751841A1 |
| Подвесной манипулятор | 1979 |
|
SU931679A1 |
| Лебедка | 1986 |
|
SU1370058A1 |
| Машина для чесания меховых шкур | 1975 |
|
SU558940A1 |
13
w
/
21 23
