(54) МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1979 |
|
SU814722A2 |
| Манипулятор | 1980 |
|
SU908589A1 |
| Манипулятор | 1978 |
|
SU679385A1 |
| Манипулятор с ручным управлением | 1978 |
|
SU664909A1 |
| Двухвалковая дробилка | 1989 |
|
SU1719057A1 |
| АВТОМАТИЧЕСКАЯ УСТАНОВКА ДЛЯ ПРОИЗВОДСТВА ДРЕНАЖНЫХ ТРУБ | 1970 |
|
SU271358A1 |
| Манипулятор | 1980 |
|
SU963848A1 |
| Манипулятор | 1981 |
|
SU1002146A2 |
| Устройство для нанесения покрытий на изделия | 1984 |
|
SU1219161A1 |
| Устройство для хранения и подачи буровых штанг | 1990 |
|
SU1813872A1 |
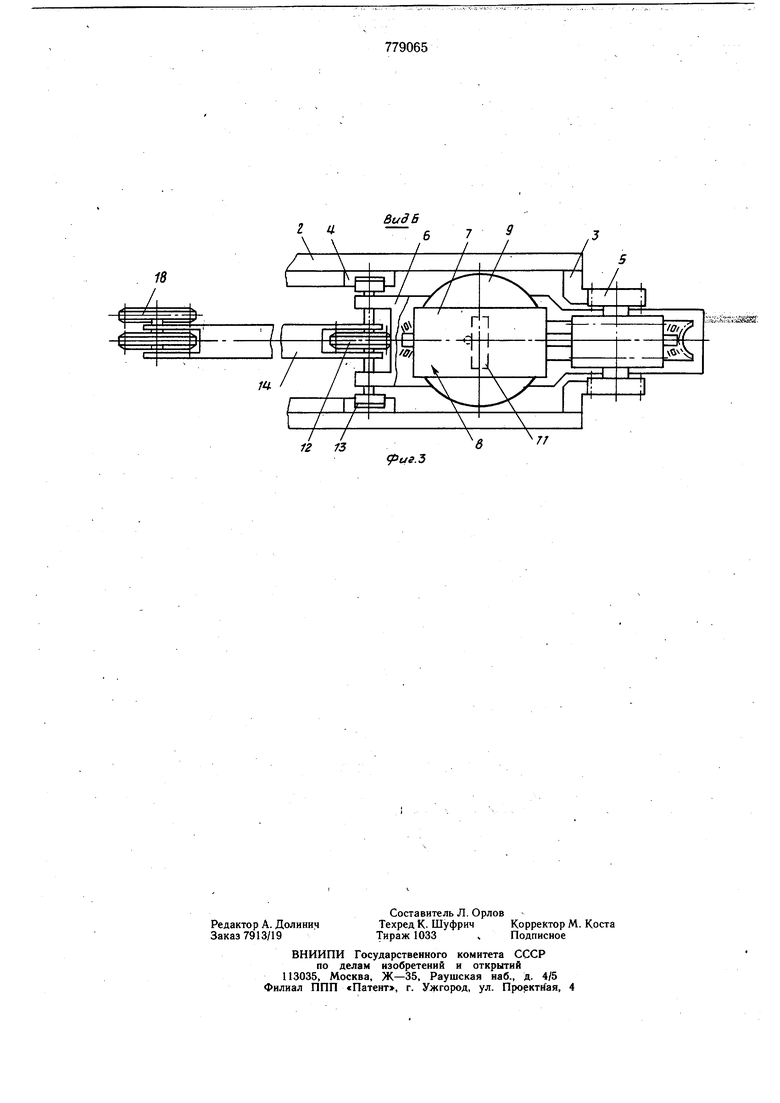
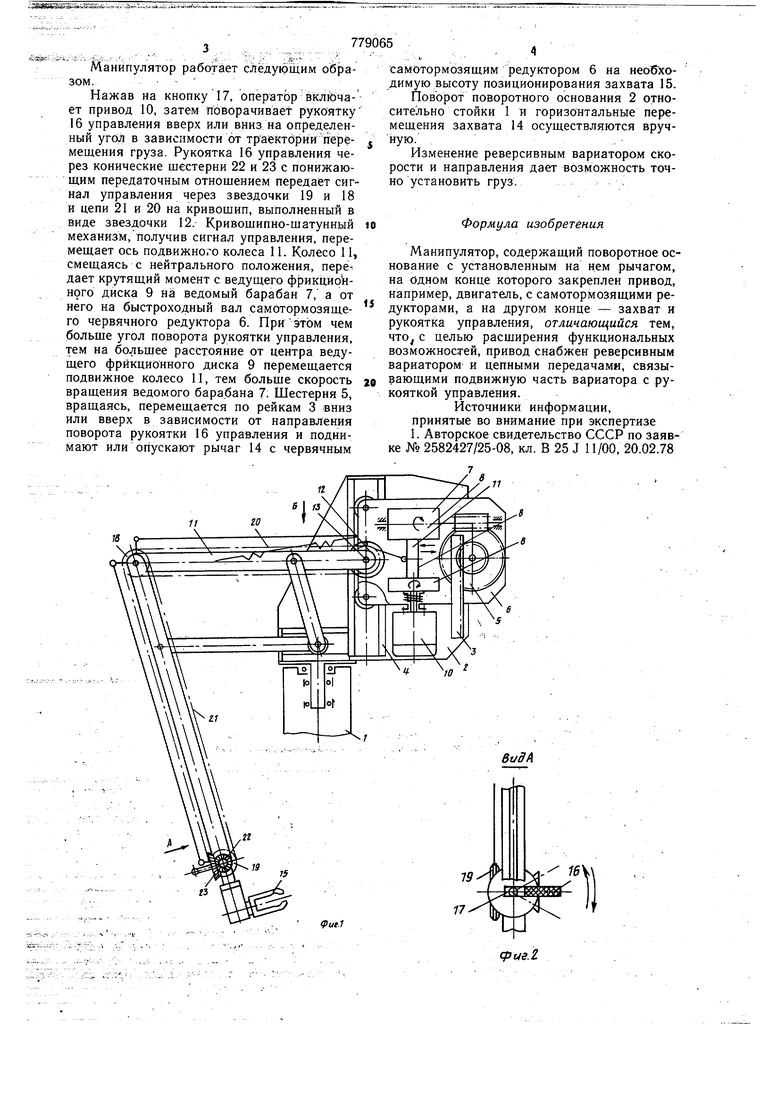
Изобретение относится к манипуляторостроению. и подъемно-транспортному машиностроению и может найти применение в механизации и автоматизация техноЛЬТИЧёс- ких процессов, связанных с точной установкой и снятием тяжелых деталей. Известен манипулятор, содержащий поворотное основание с установленным на нем рычагом, связанным с балансиром, привод, например двигатель с самотормозящим редуктором, быстроходный вал которого кинематически связан с рукояткой управления посредством цепных передач и муфты, тихоходный вал кинематически связан с рейкамиИ Наличие в известном манипуляторе ручного привода для точного позиционирования захвата сужает его функциональные возможности. Цель изобретения - устранение указанного недостатка. Указанная цель достигается тем, что привод снабжен реверсивным вариатором и цепными передачами, связывающими подвижную часть вариатора с рукояткой управления. На фиг. 1 изображен манипулятор, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - вид Б на фиг. 1. - Манипулятор содержит стойку 1, на которой закреплено поворотное основание 2 с установленными на нем рейками 3 и направляющими 4. Рейки 3 находятся в зацеплении с щестернями 5, жестко закреплёнными на тихоходном валу червячного самотормозящего редуктора 6, установленного в направляющих 4. Быстроходный вал червячного самотормозящего редуктора 6 связан с ведомым барабаном 7 реверсивного вариатора 8, а ведущнй фрикционный диск 9 связан с приводом 10. Ось подвижного колеса II, соединяющего ведомый барабан 7 с ведущим диском 9, соединена с кривощипно-щатунным механизмом, кривощип которого выполнен в виде звездочки 12, ось 13 которой закреплена на корпусе самотормозящего редуктора 6. На оси 13 также щарнирно закреплен рычаг 14, на одном конце которого установлен захват 15, рукоятка 16 управления с кнопкой 17, звездочки 18 и 19, приводные цепи 20 и 21. Звездочка 19 связана с рукояткой 16 управления через конические колеса 22 и 23. Манипулятор работает следующим об|эазом. - Нажав на кнопку17, оператЬр вклйчает привод 10, затем поворачивает рукоятку 16 у-правления вверх или вниз на определенный угбл в зависимости от тр-аект6рии rifepeмещения груза. Рукоятка 16 управления через конические шестерни 22 и 23 с понижающим передаточным отношением передает сигнал управления через звездочки 19 и 18 и цепи 21 и 20 на кривошип, выполненный в виде звездочки 12. Кривошипно-шатунный механизм, получив сигнал управления, перемещает ось подвижного колеса 11. Колесо 11, смещаясь с нейтрального положения, пере. дает крутящий момент с ведущего ф зикционного диска 9 на ведомый барабан 7, а от него на быстроходный вал самотормозящего червячного редуктора 6. Приэтом чем больше угол поворота рукоятки управления, тем на больщее расстояние от центра ведущего фрикционного диска 9 перемещается ,, , подвижное колесо 11, тем больше скорость вращения ведомого барабана 7. Шестерня 5, вращаясь, перемещается по рейкам 3 вниз ппрппТ в зависимости от направления м управления и поднимают или опускают рычаг 14 с червячным самотормозящим редуктором 6 на необхо,димую высоту позиционирования захвата 15. Поворот поворотного основания 2 относительно стойки 1 и горизонтальные перемещения захвата 14 осуществляются вручную.. Изменение реверсивным вариатором скорости и направления дает возможность точно установить груз. Формула изобретения Манипулятор, содержащий поворотное основание с установленным на нем рычагом, на Одном конце которого закреплен привод, например, двигатель, с самотормозящими редукторами, а на другом конце - захват и рукоятка управления, отличающийся тем, что, с целью расширения функциональных возможностей, привод снабжен реверсивным вариатором и цепными передачами, связыoapnaiupura и цспными передачами связьтвающими подвижную часть вариатора с рукояткой управления.« Риатора ру Источники информации принятые во внимание при экспертизе 1. Авторское свидетельство СССР по заявке № 2582427/25-08, кл. В 25 J 11/00,20.02.78 У
- ji-s-л,.
