(5) МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1980 |
|
SU963848A1 |
| Манипулятор | 1978 |
|
SU779065A1 |
| Манипулятор | 1980 |
|
SU908589A1 |
| Манипулятор | 1979 |
|
SU814722A2 |
| Двухместное захватное устройство | 1986 |
|
SU1316815A1 |
| Устройство для сборки керамических пластинчатых конденсаторов с однонаправленными выводами | 1989 |
|
SU1653015A1 |
| Двухместное захватное устройство | 1988 |
|
SU1516346A2 |
| Привод,преимущественно для устройства запрессовки штырей в плату | 1981 |
|
SU1075457A1 |
| Манипулятор | 1978 |
|
SU679385A1 |
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ ПРУЖИН | 1972 |
|
SU425709A1 |
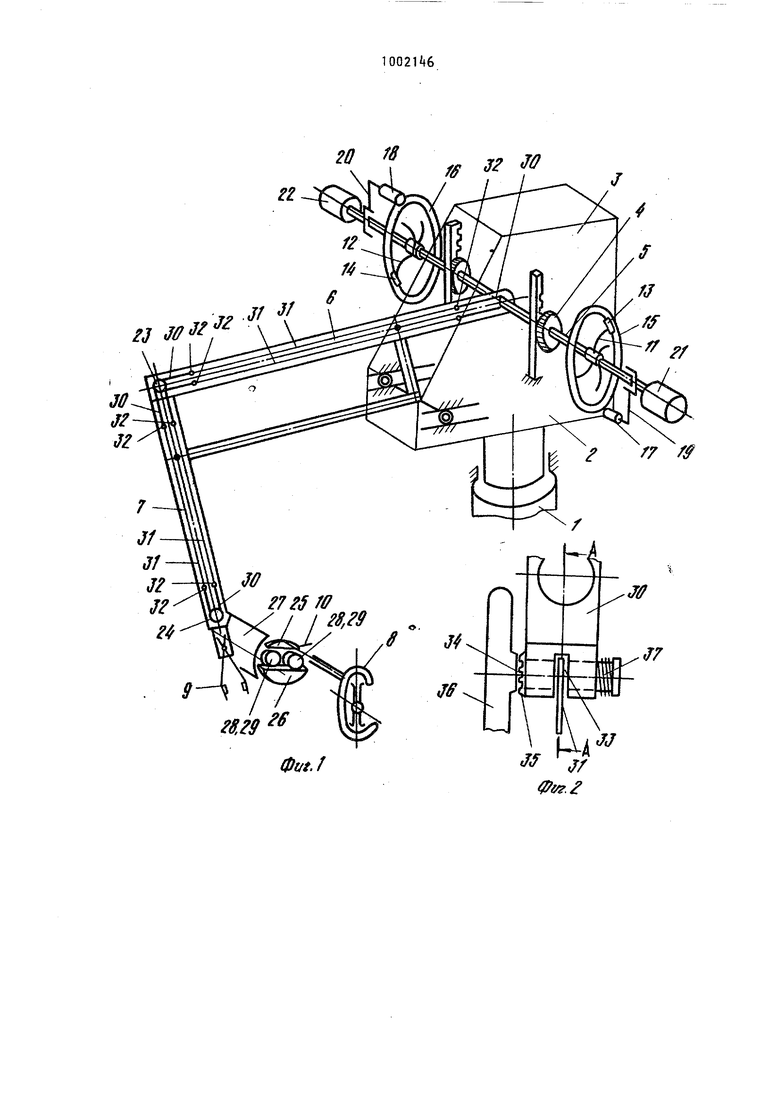
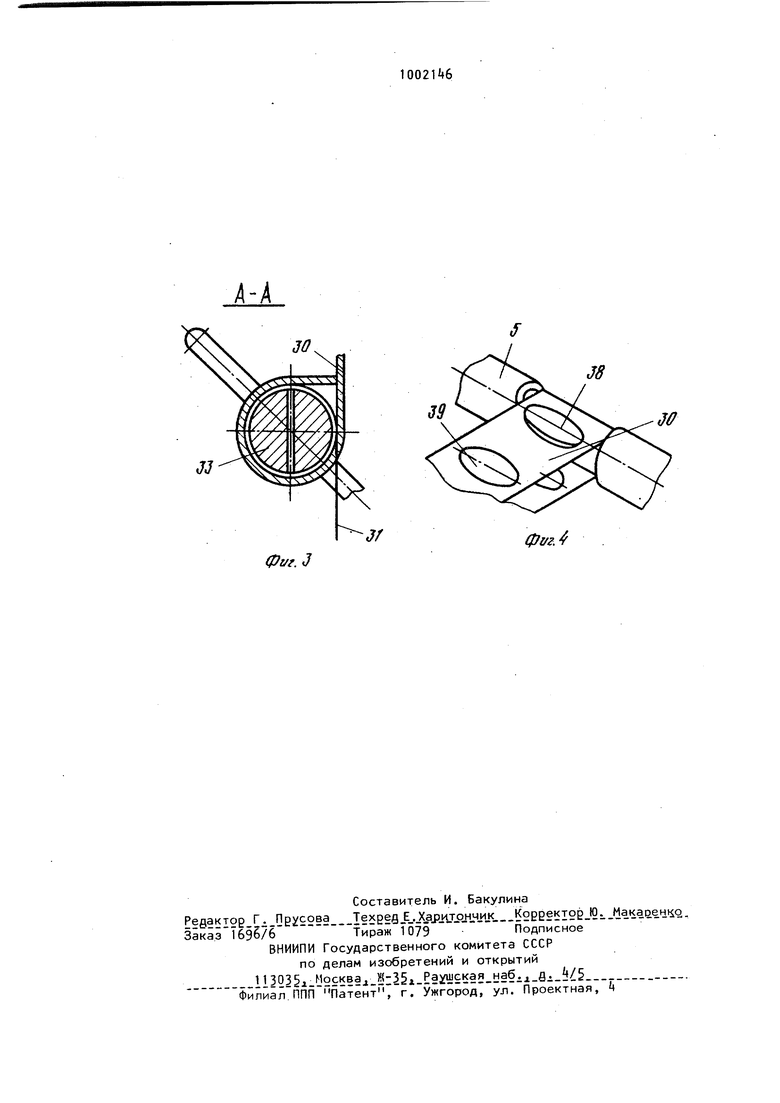
Изобретение относится к области манипуляторостроения и подъемно-тран портного машиностроения и может найт применение для механизации и автоматизации технологических процессов, связанных с точной ориентацией и уст новкой или снятием тяжелых деталей, а также для решения задач, связанных с перемещением различных предметов по определенным траекториям в пространстве. По основному авт.св.№ известен манипулятор, содержащий двигатель, поворотное основание с установленной Не нем механической рукой, выполненной в виде параллелограммного механизма, один из рычагов которого снабжен балансиром и кинематически связан с валом, а другой рычаг несет захват, муфту одно стороннего действия, связанную с рукояткой управления и также кинематически связан с валом. Цель изобретения - улучшение динамических характеристик манипулятора. Указанная цель достигается тем, что кинематическая цепь связи муфты одностороннего действия с аккумулирующим механизмом выполнена в виде последовательно соединенных отрезков стальной ленты и проволоки, связанных (Между собой дополнительно введенными натяжными самотормозящимися устройствами. На фиг. 1 изображен предлагаемый (манипулятор,общий вид, на фиг. 2 Соединение концов стальной, ленты и проволоки; на фиг. 3 - разрез А-А ма фиг. 2; на фиг. k - сопряжение стальной ленты с приводным валом. ; Манипулятор содержит стойку 1, на которой закреплено поворотное основание 2 с установленными на нем зубчатыми рейками 3. Рейки 3 находятся в зацеплении с шестернями k, которые жестко закреплены на валу 5, смонтированном на рычаге 6 параллелограммного механизма руки. На рычаге 7 РУ ки расположены рукоятка 8 управления, захват 9 и роликовая муфта 10 одностороннего действия. На концах вала 5 закреплены в радиальных направлениях элементы аккумулирующего механизма - пластинчатые пружины 11 и 12. Свободные концы пружин проходят через длинные прорези сухарей 13 и И, короткие прорези которых одеты соответственно на кольца 15 и 16, связанные, например, с по воротным основанием 2 и неподвижные относительно вала 5 I не показано). Свободные концы пружин 11 установле- . ны с возможностью подвижного взаимодействия с вращающимся роликом 17, а свободные пружины 12 - с возможностью взаимодействия с вращающимся роли ком 18. Ролики 17 и 18 установлены со ответственно на водилах 19 и 20, связанных жестко соответственно с валами двигателей 21 и 22. В шарнирных соединениях рычагов 6 и 7 установлен приводной вал 23, а на конце рычага 7 вал 24. Муфта 10 состоит из ведущего повод ка 25, непосредственно связанного с рукояткой 8 управления, ведомого поводка 26, жестко соединенного с валом 2k, корпуса 27 и роликов 28 и 29. Ролики смещены от центра -корпуса 27 в сторону ведущего поводка, чем обеспечивается передача вращения только от ведущего поводка 25 к ведомому поводку 26. Приводной вал 2 ведомого поводка 2б муфты 1 О связан с приводным валом 5 аккумулирующего механизма с пом щью отрезков стальной ленты 30 и проволоки 31. Отрезки связаны между собой с помощью натяжных устройств 32. Конструктивное оформление последних может быть любым с обеспечением самотормозящегося крепления ленты и проволоки относительно друг друга. В частности конец ленты 30 может быть :закреплен на стержне 33 снабженном, например, двумя выступами 3 с возмож ностью зацепления с впадинами 35 раз мещеными на торце ленты. В вырезе лен ты размещена проволока 31, проходящая через отверстие в стержне с образованием нескольких витков, чем обеспечивается надежное крепление конца проволоки. Впадины 35 на торце ленты выполнены с односторонним наклоном, что позволяет поворачивать стержень 33 за ручку 36 а одном направлении для осуществления натяжения системы лентапроволока-лента. Постоянное прижатие выступов З к впадинам 35 обеспечивается пружиной 37Приводной вал 5 в месте сопряжения с лентой 30 имеет выступы 38, а лента 30 содержит отверстия 39, сопрягающиеся с выступами. Место сопряжения ленты 30 с валами 23 и 2 аналогично. Манипулятор работает следующим образом. Для перемещения груза из одной точки в другую оператор вращает рукоятку 8 управления. При включенном двигателе, например двигателе 21, и при вращении водила 19 ролик 17 входит в контакт с концом пружины 11 и, если к валу 5 прилс;1ен момент сопротивления, деформирует ее; перемещая конец пружины вместе с сухарем 13 и заклинивая последний на кольце 15, оставляя пружину в напряженном состоянии. На вал 5 переда ется крутящий момент, обусловленный действием сил упругости. Очевидно, что при деформации всех пружин на валу 5 будет действовать крутящий .момент, равный величине крутящего мо мента, рассчитанного на преодоле- ние сопротивления одной пружинь,, T.e момент двигателя, умноженного мз ко личество пружин с учетом КПД передачи ролик-пружина. Поток мощности направлен от двигателя 21 к валу 5, связанному с шестернями . Шестерни , вращаясь, перемещаются по рейкам 3, например вниз, и поднимают рычаг 6 на необходимую высоту позиционирования захвата 9 соответственно направлению вращения рукоятки 8 управления. Если рукоятка 8 остановлена с одновременным выключением двигателя 21, ведомый поводок 2б муфты 10, получая вращение от вала 5 вследствие аккумулированного крутящего момента посредством гибкой передачи лента-про-волока через валы 23 и 2k, заклинит ролики 28 и 29 в корпусе 27 и остановится, что приведет к резкому возрастанию сопротивления на валу, возврату деформированных прумсин в исходное положение и остановке вала 5 Поэтому вращение валу 5 и, соответственно, шестерням k будет передаваться только тогда и с такой скоростью, с какой вращается рукоятка 8 управления. При этом усилие на рукоятке вследствие свойств необратимой роликовой муфты может быть уменьшено
51
до такой величины, что практически не будет восприниматься оператором.
Для опускания груза рукоятку 8 управления вращают в противоположном направлении с одновременным включением вращения двигателя 22 в противоположную сторону. Ведомый поводок 2б имеет возможность, вращаясь, следовать за ведущим поводком 25 и, соответственно, вал 5 получает возможность передавать аккумулированный крутящий момент от пружин 12 шестерням k в зависимости от сопротивлеНИИ, возникающих при опускании груза.
Таким образом, при помощи рукоятки 8 управления можно управлять перемещением груза в любом направлении со скоростью, соответствующей скорости вращения этой рукоятки, затх ачивая незначительные усилия на ее вращение, при этом при передаче крутящегр момента от вала 5 на шестерни i в работу будут подключаться ровно столько пружин, каково значение нагрузки на захвате и. соответственно, на шестернях . Кроме того, устранение с помощью натяжных самотормозящихся устройств 32 люфтов в
46«
сопряжении вал-лента и провисаний тягового контура между валами 5,23 и 2 приводит к одновременному и согласованному включению в работу элементов системы необратимое звено аккумулирующий механизм при переходных процессах: поднятие - опускание груза. В итоге в системе устанавливается оптимальная работа привода при значительных колебаниях нагрузки на рабочие органы манипулятора и минимизируется потребляемая энергия привода с обеспечением высоких динамических свойств манипулятора.
Формула изобретения
Манипулятор по авт.св. № , отличающийся тем, что, с целью улучшения динамических характеристик, кинематическая цепь связи муфты одностороннего действия с аккумулирующим механизмом выполнен в виде последовательно соединенных отрезков стальной ленты и проволоки, связанных между собой дополнительно введенными натяжными самбтормозящимися устройствами. 2Q S 0t/f.7 fff r
%./ f
фиг. 3 J/ фог.
