(54) РОТОРНЫЙ ЭКСКАВАТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Роторный экскаватор | 1985 |
|
SU1266929A2 |
| Роторный экскаватор-отвалообразователь | 1970 |
|
SU339202A1 |
| Роторный экскаватор | 1991 |
|
SU1795997A3 |
| Роторный экскаватор | 1990 |
|
SU1752876A1 |
| Роторный экскаватор | 1987 |
|
SU1530679A1 |
| Роторный экскаватор | 1979 |
|
SU962467A1 |
| Роторный экскаватор | 1987 |
|
SU1565969A1 |
| РОТОРНЫЙ ЭКСКАВАТОР | 1996 |
|
RU2095521C1 |
| Экскавационная машина | 1988 |
|
SU1609878A1 |
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР | 1967 |
|
SU192087A1 |
Изобретение относится н землеройным машинам, а конкретнее к роторным экскаваторам, я может быть (Применено для открытой разработки полезных ископаемых.
Известен роторный экскаватор, включающий Н1ИЖНЮЮ раму, ходовое оборудование, поворотную платформу со стрелой ротора - выдвижной либо телескопической, м еханизм подъемна, систему конвейеров 1.
Недостатком экскаватора является то, что он требует значительного усложнения конструкции и схем управления. Кроме того, требуется установка дополнительного оборудования, а именно механизма напора стрел, подвижного противовеса, механиз.ма фиксации телескоиичности стрел прИ увеличении количества конвейеров на стреле ротора, что существенно увеличивает вес экскаватора.
Известен роторный экскаватюр, включающий ходовое О|борудование, яижнюю раму, поворотную платформу с надстройкой и с з акреплеяной на ней стрелой ротора, механизм подъема стрелы, приемный и промежуточный конвейеры 2.
Так как приемный конвейер расположен соосно со стрелой ротора, точка подвески которой совладает с осью ба|ра бана ко(нвейера, а угол подъемна конвейера должен быть не более ±18°, то и стрела ротора относительно горизонтальной оси может отклоняться только на угол ±;18°Поэтому при отработке забоя на всю глубину с заданным углом откоса роторный экскаватор с постоянной длиной стрелы ротора и фиксированным крепленнём опоры на надстройке на каждом нижележащем столе должен отъезжать назад иа величину, определяемую углом откоса и
10 высотой опускания ротора на слой. Число отъездов экскав1атора будет равно количеству слоев забоя .минус единица.
Таким образом, недостатком такого экскаватора является то, что в процесс его работы имеют место непроизводительные потери времени, снижающие техническую производительность.
Цель изобретения - повышение производительности путем сокращения рабо20чего времени цикла.
Достилается это тем, что в роторном экскаваторе, включ1ающе1М ходовое оборудование, нижнюю раму, по(вО)ротную платформу с отодстройкой и с закрепленной на
25 ней стрелой ротора, механизм подъема стрелы, приземный и про1межуточ;ный конвейеры, стрела ротора закреплена под углом в вертикальной плоскости к приемному конвейеру, передний конец которого 30 шарнирно установлен на стреле, а задний
снабжен тележкой для перемещения по направляющим, которые имеет иром-ежуточный конвейер, пр1и этом 1нарравляющие промежуточного конвейбрй выполнены криволинейным1И с центрам KIPMBHSHH в месте установки стрелы роторН ва иадстройке, а угол установки между стрелой и конвейером определяется ло формуле
I
Р а + агс cos 51п(а-1-ф),
где а - предельно допустимый угол работы приемного конвейера; Ф - угол OTKJOca забоя.
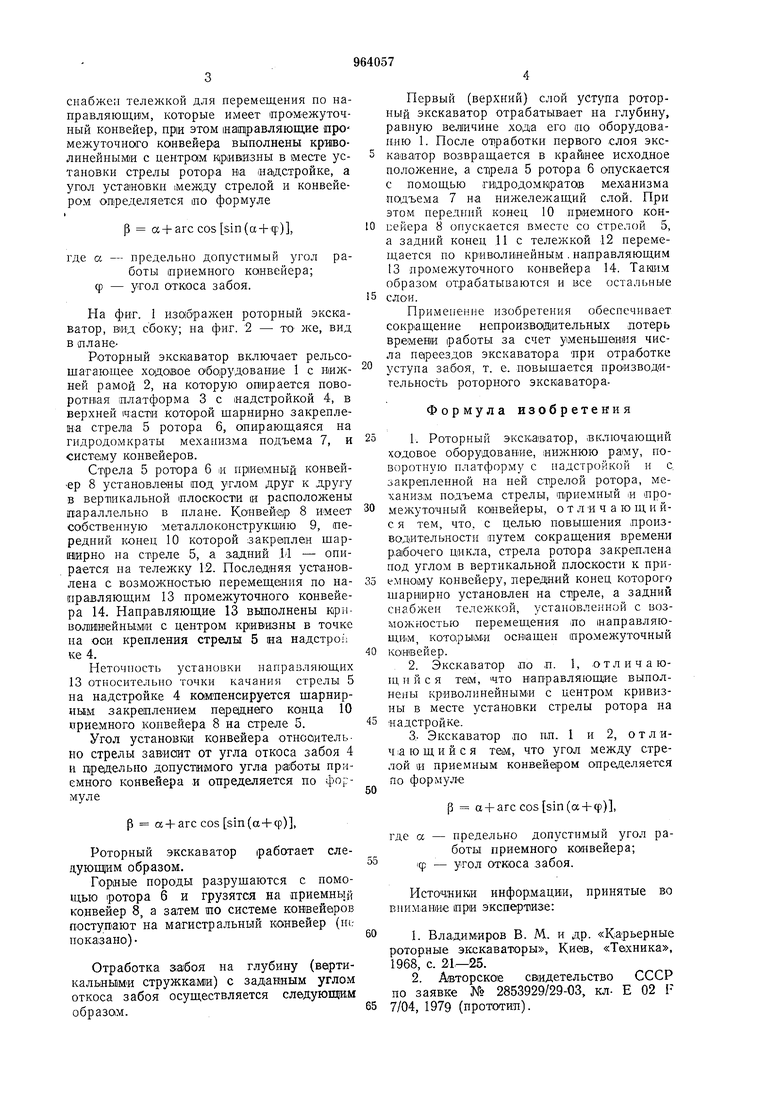
На фиг. 1 изабражен роторный экскаватор, вид сбоку; на ф-иг. 2 - тО же, вид в планеРотор;ный экск1аватор включает рельсощагающее ходовое або рудовани.е 1 с рамой 2, на которую опирается поворотная платформа 3 с надстройкой 4, в верхней пасти котррой щарнирно закреплена стрелй 5 ротора 6, опирающаяся на гидродомкраты механизма подъема 7, и систему конвейеров.
Стрела 5 ротора 6 и приемный конвейер 8 установлены под углом друг к другу в вертикальной плоскости и расположены параллельно в плане. Копвейор 8 имеет собственную металлоконструкцию 9, передний конец 10 которой закреплен шариирно на стреле 5, а задний .М - опирается на тележку 12. Последняя установлена с возможностью перемещения по направляющим 13 промежуточного конвейера 14. Напр авляющие 13 выполнены кривол1ИН1ейными с центром кривизны в точке на оси крепления стрелы 5 на надстро; ке 4.
Неточность установки направляющих 13 относительно точки качания стрелы 5 на надстройке 4 компенсируется шарнирным закреплением переднего конца 10 приемного конвейера 8 на стреле 5.
Угол установки конвейера отнооительно стрелы зависит от угла откоса забоя 4 и предельно допустимого угла работы приемного конвейера и определяется по формуле
Р а + агссо5 з1п(а + ф).
Роторный экскаватор |работает следующим образом.
Гордые породы разрушаются с помощью ipoTopa 6 и грузятся на приемньтй конвейер 8, а затем по системе конвейаров поступают на магистральный конвейер (нс показано)
Отработка за1боя на глубину (вертнкальнымИ стружками) с заданным углом откоса забоя осуществляется следующнм образам.
Нервый (верхний) слой уступа роторный экскаватор отрабатывает на глубину, равную вел1ичине хода его то оборудованию 1. После от работки первого слоя экскаваггор возвращается в крайнее исходное положение, а ст|рела 5 ротора 6 опускается с помощью гидродомк(рато(в механизма подъема 7 на нижележащий слой. При этом передний конец 10 приемного конпейера 8 опускается вместе со стрелой 5, а задний конец 11 с тележкой 12 перемещается по криволинейным . направляющим 13 промежуточного конвейера 14. Таыим образом отрабатываются и все остальные
слои.
Применение изобретения обеспечивает сокращение ненроизвощительных потерь времени работы за счет уменьшения числа пе(реездов экскаватора при отработке уступа забоя, т. е. повышается производительность роторного экскаватораФормула изобретения
комвейер.
надстройке.
3,. Экскаватор по пл. 1 и 2, отличающийся там, что угол между стрелой и приемным конвейером определяется по формуле
Р а + агс (а + ф),
где а - предельно допустимый угол работы приемного конвейера; Ф - угол откоса забоя.
Источник1И информации, принятые во внимание при экспертизе:
7/04, 1979 (прототип).
6 №
//// /J /
fpiz. /
7Г, /Z74
Фаг. 2
