1
Изобретение относится к автоматизации подъемно-транспортных машин, в частности к устройствам для управления приводом механизма поворота шагающего экскаватора-драглайна.
Известны устройства для управления шагающим экскаватором-драглайном 1.
Наиболее близким по технической сущности является устройство для управления приводом механизма поворота экскаватора, например шагающего драглайна, включающее датчик угла поворота, датчик скорости вращения поворотной платформы, датчик угла отклонения ковща и формирователь сигнала задания скорости привода механизма поБоротаС27В указанном устройстве вычисляется управление для быстрейшего перевода ковша в точку покоя, причем так, чтобы значение абсолютной ошибки и ее скорости были нулевым. Однако при этом относительная и переносная составляющие скорости оказываются не нулевыми, что устраняет возможность удержания ковща в точке покоя, кроме того, показатели точности системы существенно зависят от начальных значений углового отклонения ковща.
Цель изобретения - повышение производительности экскаватора за счет увеличения точности максимально быстрого перемешения раскачивающего ковща из произвольного положения в точку покоя и последующего удержания его в точке покоя.
Указанная цель достигается тем, что устройство снабжено блоком прогнозирования скорости и блоком прогнозирования ощибки, ко входам которого подключены датчики скорости вращения поворотной
10 платформы, угла поворота экскаватора и угла отклонения ковша и выход блока прогнозирования скорости, а выходы блока прогнозирования ошибки подключены к трем входам блока прогнозирования скорости 15 и ко входу формирователя сигнала задания скорости привода механизма поворота.
При этом блок прогнозирования скорости выполнен в виде трех интеграторов, звена памяти, релейного звена инвертора, двух компараторов, нелинейного звена и сумматора, причем выход релейного звена подключен к выходу звена памяти, вход которого соединен с выходом первого интегратора и с одним из входов первого компаратора, второй вход которого соединен с источником
напряжения, выходы первого и второго компаратора подключены ко входу сумматора, выход которого и вход первого интегратора подключены ко входу второго интегратора, подключенного к одному из входов второго компаратора и через третий интегратор ко входу инвертора, выход которого подключен ко входам второго интегратора и нелинейного звена, соединенного выходом со вторым входом второго компаратора, при этом входы начальных условий интеграторов являются входами блока прогнозирования скорости. При этом блок прогнозирования ошибки выполнен в виде четырех интеграторов, звена памяти, звена дифференцирования, инвертора, нелинейного звена, двух компараторов и суммара, причем первый и второй интеграторы соединены последовательно, выходы последних подключены соответственно к одному из входов первого компаратора и ко входу звена памяти, а ко входу первого интегратора подключен выход сумматора, ко входам которого подключены выходы первого и второго компараторов, второй вход первого компаратора соединен с источником напряжения, первый вход второго компаратора подключен к выходу третьего и ко входу четвертого интегратора, соединенных последовательно, выход четвертого интегратора через инвертор подключен ко входу соединенного со вторым входом второго компаратора нелинейного звена и к одному из входов третьего интегратора, второй вход которого соединен со входом первого интегратора, а вход начального условия третьего интегратора соединен с выходом звена дифференцирования, вход которого подключен ко входу начального условия четвертого интегратора. Причем входа начальных условий первого и второго интеграторов и вход дифференциатора являются входами блока прогнозирования ошибки.
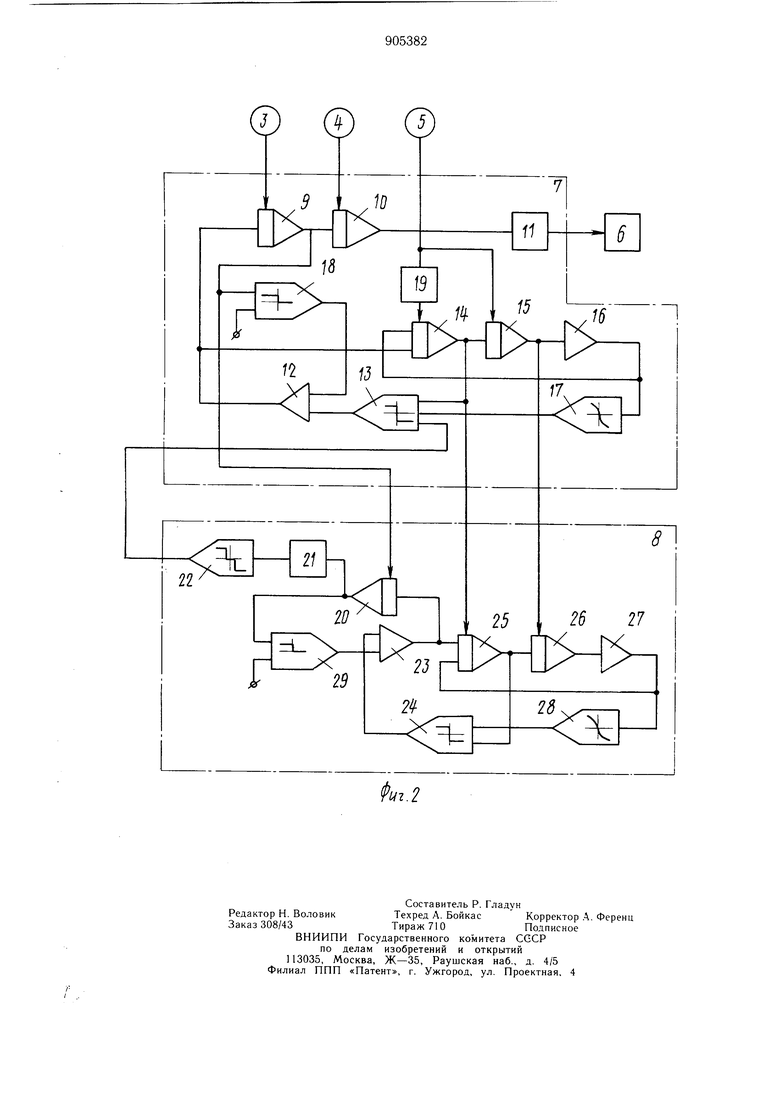
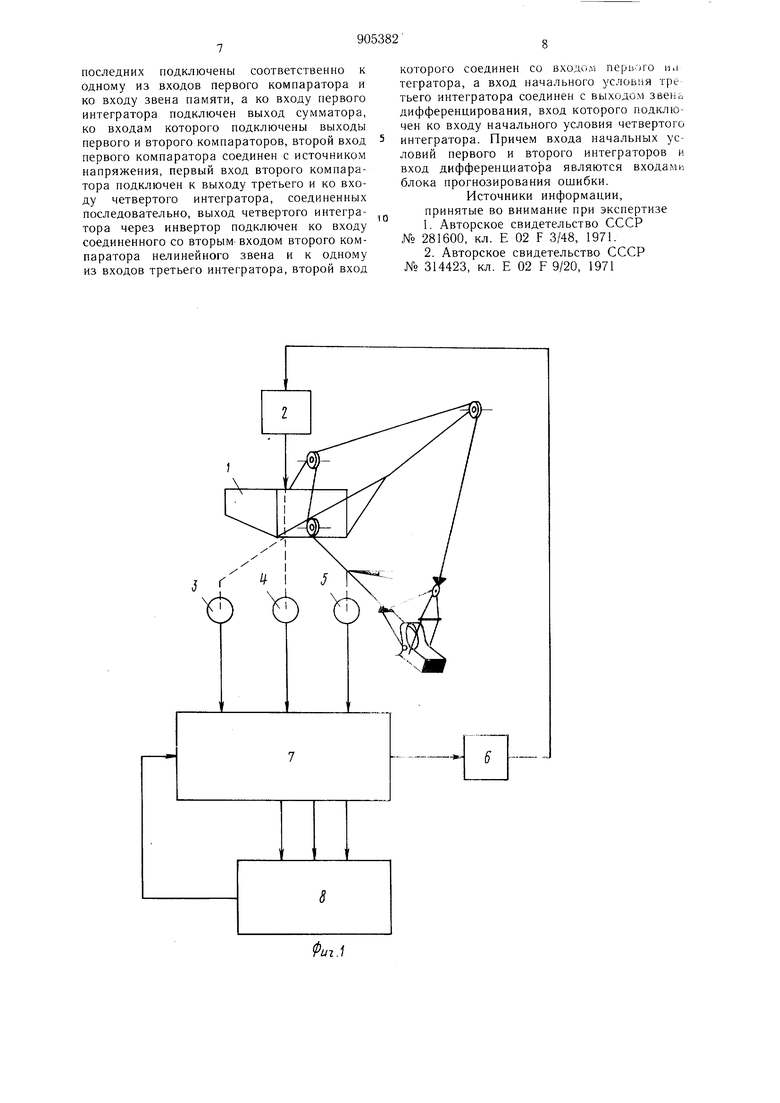
На фиг. I представлена блок-схема устройства; на фиг. 2 - блок-схема блоков прогнозирования ошибок и скорости.
Устройство включает в себя экскаватор 1, привод 2 механизма поворота, датчик 3 скорости вращения поворотной платформы экскаватора, датчик 4 угла поворота экскаватора, датчик 5 углового отклонения ковша, формирователь 6 сигнала задания скорости привода механизма поворота, блок 7 прогнозирования ошибки, блок 8 прогнозирования скорости.
Датчик 3 скорости враш.ения поворотной платформы, и датчик 4 угла поворота экскаватора, датчик 5 углового отклонения ковша, подключены к первому, второму и третьему входу блока 7 прогнозирования ошибки соответственно. Четвертым входом блока 7 прогнозирования ошибки служит выход блока 8 прогнозирования скорости, который своими тремя входами подключен к первому, второму и третьему выходу блока.
а входами подключен к первому, второму и третьему выходу блока прогнозирования ошибки соответственно. Четвертый выход блока 7 прогнозирования ошибки служит входом блока 6 формирования сигнала задания скорости, выход которого подключен ко входу привода 2 механизма поворота экскаватора 1.
На фиг. 2 показан блок 7 прогнозирования ошибки и блок 8 прогнозирования скорости. Вход начального условия интегратора 9 подключен к первому входу блока 7 прогнозирования ошибки, вход начального условия интегратора 10, присоединенный своим входом к выходу интегратора 9, подключен ко второму входу блока 7 прогнозирования ошибки. Выход интегратора 10 присоединен ко входу звена 11 памяти, выход которого служит четвертым выходом блока 7 прогнозирования ошибки. Выход сумматора 12 к первому входу которого подключен выход компаратора 13, соединен
одновременно со входом интегратора 9 и первым входом интегратора 14. Выход интегратора 14 присоединен ко входу интегратора 15, выход которого подключен ко входу инвертора 16, выход которого соединен с нелинейным звеном 17, подключенный своим выходом к первому входу компаратора 13. Выход инвертора 16, кроме того, подключен ко второму входу интегратора, выход которого соединен со вторым входом компаратора 13 и вторым выходом блока
7 прогнозирования ошибки. Третьим выходом блока прогнозирования ошибки служит выход интегратора 15, первым выходом блока 7 прогнозирования ошибки служит вход интегратора 9, который, кроме того, подключен к первому входу компаратора
18, второй вход которого соединен с источником напряжения,, а выход подключен ко второму входу сумматора 12. Вход начального условия интегратора 15 подключен к третьему входу блока 7 прогнозирования
ошибки, к которому также присоединен вход звена дифференцирования 19, выход которого служит входом начального условия интегратора 14. Четвертый вход блока 7 прогнозирования ошибки подключен к третьему входу компаратора 13.
Входами блока 8 прогнозирования скорости служит соответственно первый, второй и третий выходы блока 7 прогнозирования ошибки. Вход начальных условий интегратора 20 подключен к первому входу блока
8 прогнозирования скорости, выход интегратора 20 соединен с входом блока 21 памяти, выход которого подключен ко входу релейного звена 22, выход которого служит выходом блока 8 прогнозирования скорости. Выход сумматора 23, к первому входу которого подключен компаратор 24, соединен одновременно со входом интегратора 20 н первым входом интегратора 25. Выход интегратора 25 присоединен ко входу интегратора 26, выход которого подключен ко входу инвертора 27, выход которого соединен с нелинейным звеном 28, подключенный своим выходом к первому входу компаратора 24, второй вход которого подключен к выходу интегратора 25. Выход инвертора 27, кроме того, соединен со вторым входом интегратора 25, вход начального условия которого присоединен ко второму входу блока 8 прогнозирования скорости, третий вход которого присоединен ко входу начального условия интегратора 26. Выход интегратора 20, кроме того, соединен с первым входом компаратора 29, второй вход которого присоединен к источнику напряжения, а -ъход подключен ко второму входу сумматора 23.
Устройство работает следующим образом.
В блоке 7 прогнозирования ошибки моделируется будущее положение платформы экскаватора при управлении по наискорейшему успокоению колебания ковща и остановке платформы. Моделирование будущего движения платформы осуществляется на интеграторах 9 и 10, начальными условиями будущего движения являются сигналы текущего состояния движения платформы, снимаемые с датчиков 3 и 4. В звене 11 памяти хранится сигнал пропорциональный будущему положению платформы, из этого сигнала формируется сигнал задания скорости в блоке 6. Сигнал управления успокоением ковща и остановке платформы формируется в сумматоре 12, на основе сигналов двух компараторов 18 и 13, один из которых 13 вместе с нелинейным звено.м 17 входит в схему оптимального регулятора модели колебания ковща состоящей из интеграторов 14 и 15 и инвертора 16, другой компаратор 18 вырабатывает нулевой сигнал, когда прогнозируемая скорость достигает своего установивщегося значения. Сигналами начальных условий интеграторов 14 и 15 являются сигналы датчика 5 и дифференциатора 19, работающих в реальном масщтабе времени. На интеграторе 20 блока 8 прогнозирования скорости вырабатывается сигнал, пропорциональный прогнозируемому значению скорости платформы при условии оптимального приведения ковща в точку покоя. Модель оптимального движения ковща в точку покоя собрана на интеграторах 25 и 26 и инвертора 27, нелинейном звене 28, компараторе 24. Сигналами начальных условий интеграторов 25 и 26 являются выходные сигналы интеграторов 14 и 15. Сигнал оптимального управления по успокоению ковща вырабатывается на выходе сумматора 23 из сигналов компараторов 24 и 29 прогнозируемое значение скорости платформы хранится в звене 21 памяти и используется для формирования релейным звеном 22 управляющего сигнала на компаратор 13.
Применение предлагаемого устройства позволяет увеличить производительность мащин, его надежность, точность, при несущественной зависимости точности приведения от начального состояния объекта управления платформы и раскачивающегося ковща.
Формула изобретения
1. Устройство для управления приводом механизма поворота экскаватора-драглайна, включающее датчик угла поворота экскаватора, датчик скорости вращения поворотной платформы, датчик угла отклонения
ковща и формирователь сигнала задания скорости привода механизма поворота, отличающееся тем, что, с целью повыщения производительности экскаватора за счет увеличения точности максимально быстрого перемещения раскачивающегося ковща из произвольного положения в точку покоя в последующего удержания его в этой точке, оно снабжено блоком прогнозирования скорости и блоком прогнозирования ощибки, ко входам которого подключены датчики
скорости вращения поворотной платформы, угла поворота экскаватора и угла отклонения ковща и выход блока прогнозирования скорости, а выходы блока прогнозирования ощибки подключены к трем входам блока прогнозирования скорости и ко входу формирователя сигнала задания скорости привода механизма поворота.
2.Устройство по п. 1, отличающееся тем, что блок прогнозирования скорости выполнен в виде трех интеграторов, звена памяти, релейного звена, инвертора, двух компараторов, нелинейного звена и сумматора, причем выход релейного звена подключен к выходу звена памяти, вход которого соединен с выходом первого интегратора и с одним из входов первого компаратора, второй вход которого соединен с источником напряжения, выходы первого и второго компаратора подключены ко входу сумматора, выход которого и вход первого интегратора подключены ко входу второго интегратора, подключенного к одному из
входов второго компаратора и через третий интегратор ко входу инвертора, выход которого подключен ко входам второго интегратора и нелинейного звена, соединенного выходом со вторым входом второго компаратора, при этом входы начальных условий интеграторов являются входами блока прогнозирования скорости.
3.Устройство по п. 1, отличающееся тем, что блок прогнозирования ощибки выполнен в виде четырех интеграторов, звена па.мяти, звена дифф|еренцирования, инвертора, нелинейного звена, двух компараторов и сумматора, приче.м первый и второй интеграторы соединены последовательно, выходы
последних подключены соответственно к одному из входов первого компаратора и ко входу звена памяти, а ко входу первого интегратора подключен выход сумматора, ко входам которого подключены выходы первого и второго компараторов, второй вход первого компаратора соединен с источником напряжения, первый вход второго компаратора подключен к выходу третьего и ко входу четвертого интегратора, соединенных последовательно, выход четвертого интегратора через инвертор подключен ко входу соединенного со вторым- входом второго компаратора нелинейного звена и к одному из входов третьего интегратора, второй вход
которого соединен со входом перього и а тегратора, а вход начального условия тре тьего интегратора соединен с выходом звень дифференцирования, вход которого подключен ко входу начального условия четвертого интегратора. Причем входа начальных условий первого и второго интеграторов и вход дифференциатора являются входами блока прогнозирования ошибки.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 281600, кл. Е 02 F 3/48, 1971.
2.Авторское свидетельство СССР № 314423, кл. Е 02 F 9/20, 1971
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электроприводом поворота экскаватора-драглайна | 1981 |
|
SU972009A1 |
| Устройство для контроля положенияКОВшА эКСКАВАТОРА-дРАглАйНА | 1979 |
|
SU827709A1 |
| Устройство для управления экскаватором типа "прямая лопата | 1983 |
|
SU1113490A1 |
| Устройство для автоматизированного управления электроприводом экскаватора-драглайна | 1983 |
|
SU1145093A1 |
| Устройство для взвешивания ковшадРАглАйНА | 1979 |
|
SU804775A1 |
| Устройство для управления процессом выбора зазоров механических передач в двухдвигательном электроприводе поворота экскаватора | 1983 |
|
SU1129301A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ УГЛОВОГО | 1973 |
|
SU375351A1 |
| Устройство для контроля производитель-НОСТи ОдНОКОВшОВОгО эКСКАВАТОРА | 1977 |
|
SU812891A1 |
| Способ ограничения динамических нагрузок механизма поворота экскаватора и устройство для его реализации | 1990 |
|
SU1781393A1 |
| Устройство для контроля положения ковша экскаватора-драглайна | 1980 |
|
SU964061A2 |