(З) МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД
| название | год | авторы | номер документа |
|---|---|---|---|
| Многодвигательный электропривод | 1990 |
|
SU1818676A1 |
| Устройство для управления тяговым электродвигателем транспортного средства | 1990 |
|
SU1761561A1 |
| Многодвигательный электропривод | 1980 |
|
SU930557A2 |
| Многодвигательный электропривод | 1980 |
|
SU974528A1 |
| Электропривод постоянного тока | 1978 |
|
SU817953A1 |
| Многодвигательный тяговый электропривод | 1990 |
|
SU1824663A1 |
| Электропривод | 1981 |
|
SU985911A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА С ОБРАТНОЙ СВЯЗЬЮ ПО ЭДС | 2001 |
|
RU2211526C2 |
| Многодвигательный электропривод | 1987 |
|
SU1601730A1 |
| ТЯГОВЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 2010 |
|
RU2440900C1 |
1 , , .
Изобретение относится к электро- . технике, в частности к электроприводу с двухзонным управлением взаимосвязанными электродвигателями.
Известны системы многодвигательного взаимосвязанного электропривода с питанием электродвигателей от общего источника энергии ij t33 i Недостатком известных устройств является ручное управление распределением нагрузок, что не обеспечивает равномерной загрузки электродвигателей при изменении режима работы.
Наиболее близким техническим решением к предлагаемому является многодвигательный электропривод, содержащий последовательно «соединенные задающий блок, первый блок управления , первый тиристорный преобразователь, к выходу которого подключены параллельно якорные цепи электродвигателей, обмотки возбуждения которых подключены к выходам второго и третьего тиристорных преобразователей, на вход второго и третьего тиристорного преобразователя подключены второй и третий блоки управления соответственно, датчики тока якоря каждого электродвигателя t. Основным недостатком этого устройства является сложность и низкая надежность работы, высокая стоимость. Низкий уровень сигналов, снимаемых с
to шунтов в якорных цепях, в условиях индустриальных помех обусловливает частые сбои в работе устройства, требует для соединения шунтов и системы управления прокладки протяженных экранированных кабельных трасс повышенного сечения.
Цель изобретения повышение надежности и упрощение устройства. Поставленная цель достигается
20 тем, что каждый датчик тока выполнен в виде цепочки из двух последовательно включенных резисторов и конденсатора , подключенного параллельiHO второму резистору, каждая цепочка
подключена параллельно компенсационной обмотке и обмотке дополнительных полюсов соответствующего электродвигателя, включенных последовательно, общие точки соединения резисторов каждого датчика подключены к входу третьего блока управления.
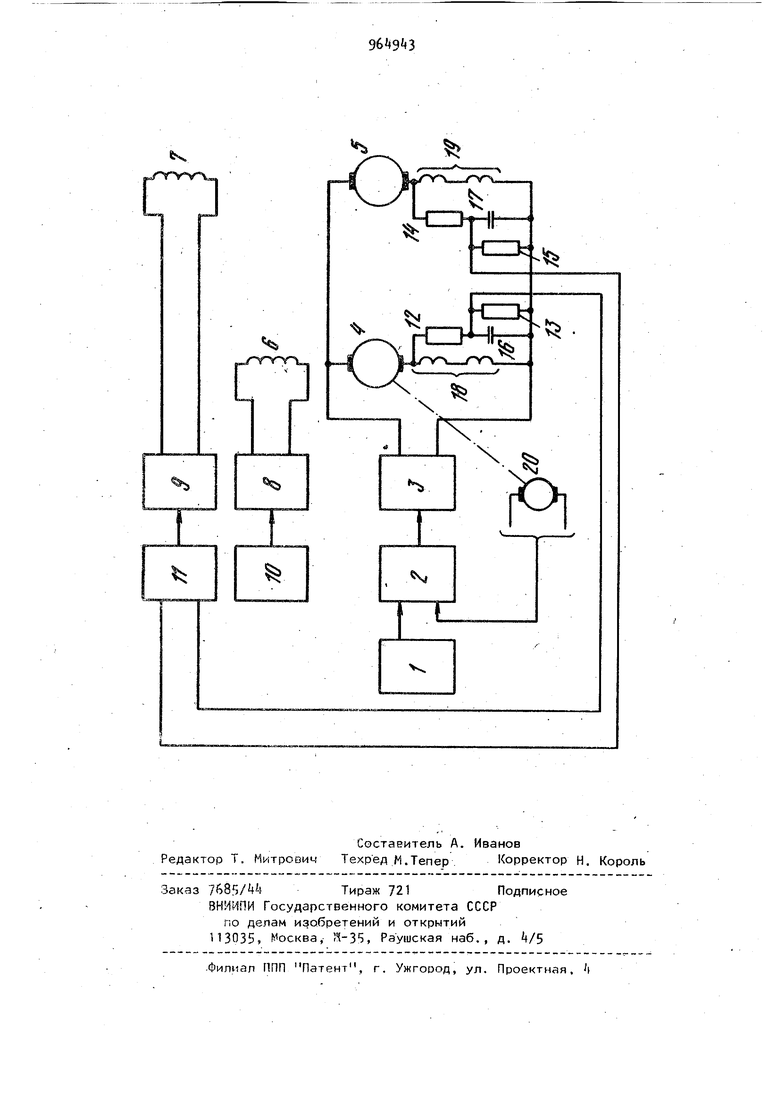
На чертеже представлена блок-схема устройства.
Многодвигательный электропривод содержит последовательно соединенные задающий блок 1, .первый блок 2 управления, первый тиристорный преобразователь 3, к выходу которого подключены якорные цепи электродвигателей и 5, обмотки возбуждения 6 и 7 которых подключены к выходам второго 8 и третьего 9 тиристорных преобразователей соответственно на вход второго 8 и третьего 9-тиристорных преобразователей подключены соI ответственно блоки 10 и 11 управления, датчики тока, каждый из которых выполнен на двух последовательно включенных резисторах 12,13 и и конденсаторах 16 и 17, подключенных параллельно резисторам 13 и 15 соответственно. Каждая образованная таким образом цепочка подключена параллельно компенсационной обмотке 18 и обмотке 19 дополнительных полюсов соответствующего электродвигателя k и 5, включенным последовательно, общие точки соединения резисторов 12, 13 и 1, 15 каждого датчика подключены к входу третьего блока 11 управления. Тахргенератор 20 механически связан с первым электродвигателем Л и электрически с блоком 2 управления.
Устройство работает следующим образом.
На входе блока 2 управления тиристорным преобразователем 3 алгебраически суммируются сигналы с выхода задающего блока 1 и тахогенератора 20. Выходной сигнал блока 2 управляет работой тиристорного преобразователя 3 питающего якорные цепи первого и второго 5 двигателей. С выхода блоков 10 и 11 управления на входы тиристорных преобразователей 8 и 9 поступает сигнал, определяющий величину тока в, обмотках возбуждения 6 и 7.
Пусть в якорной цепи первого двигателя Л течет ток 1, в якорной цеЛИ второго 1- ток Ij. 8 этом случае падение напряжения на обмотках 18
(K4- M
,Р)
и
(П (2)
и на обмотках 19
-KiP
i
-М где г
активное сопротивлекл
ние и индуктивность
обмоток 18; . ifj активное сопротивление
И индуктивность обмоток 19;
р - оператор дифференцио рования. На основании (1) и(2) можно определить .падение напряжений U на резисторе 13 и U4 на резисторе 15
(3)
RI+RJ RiRi
(Ю R4
и,-1
V-4vR4-R,R /
где R л сопротивление резисторов 12 - 15 соответственно;
С С,- - емкость конденсаторов 16 и 17 соответственно. На вход блока 11 управления поступает разность сигналов (3) и ( )
I, -п.
1
f:;., .(5)
ч
Я4Чг TKP р --i
- чb|C-t
Если
-IT;; i4-.R4 TO :равенство 5 принимает вид
(7)
и. - т R,4 V
При условии выполнения равенства , ElD.Ma (8)
на входе блока 11 управления действует сигнал, пропорциональный разности токов якорных цепей двигателей. Полярность сигнала выбирается такой, что изменение тока возбуждения второго двигателя приводит к уменьшению разности токов якорных це пей двигателей. Таким образом, подбор элементов 12,...7 в соответствии с условиями (6) и (8) позволяет сформировать сиг нал, пропорциональный разности токоё якорных цепей двигателей, а использование такого сигнала для управлени возбуждением-двигателей даёт возможность выравнять нa pyзки. При использовании устройства достигается повышение надежности функционирования системы согласованного электропровода, снижение стоимости за счет упрощения конструкции и пйвышение срока службы электродвигателей за счет облегчения условий их эксплуатации. Формула изобретения Многодвигательный электропривод, содержащий последовательно соединенные задающий блок, первый блок управ ления, первый тиристорный преобразова выходу которого подключены параллельно якорные цепи электродвигателей , обмотки возбуждения которых подключены к выходам второго и третьего тиристорных преобразователей, на вход второго и третьего тиристорных преобразователей подключены второй и третий блоки управления соот ветственно, датчики тока якоря каждого электродвигателя, отличаю щ и и с я тем, что, с целью повышения надежности его в работе и /прощения конструкции каждый датчик гока выполнен в виде цепочки из двух последовательна включенных резисторов и кондесатора, подключенного параллель н второму резисторуi каждая цепочка подключена параллельно компенсационной обмотке и обмотке дополнительных полюсов соответствующего электродвигателя, включенных последовательно, общие точки соединения резисторов каждого датчика подключены к входу третьего блока управления. Источники информации, принятые 9О внимание при экспертизе 1.Чиликин М. Г.Соколов М. М., Терехов В. М. и др. Основы автоматизированного электропривода. Н., Энергия, 197V, с. 135-137. 2.Чиликин М. Г.Ключьев В. И. Сандлер А. С. Теория автоматизированного электропривода. М., Энергия, 1979, с. 528. 3.Фрер Ф., Орттенбургер Ф. Основные звенья регулируемого привода постоянного тока. М., Энергия, 1977, с. 73-7. t. Бычков В. П. Электропривод и автоматизация металлургического производства. Н., Высшая школа, 1977, с. 330-336.
