(54) СПОСОБ СБОРКИ ЗУБЧАТОЙ ПЕРЕДАЧИ
1
Изобретение относится к машиностроению и может быть использовано при сборке зубчатых передач.
Известны способы сборки зубчатых передач с передаточным отношением равным единице, при котором выявляют кинемати- 5 ческие погрешности каждого зубчатого колеса и устанавливают их относительно друг друга таким образом, чтобы погрешности компенсировали взаимное влияние 1.
Недостатки такого способа сборки заклю-.,. чаются в невысокой точности и недостаточной производительности, поскольку требуются многократные перезацепления пары с целью нахождения приемлемого варианта сборки.
Наиболее близким к изобретению явля- is ется способ сборки зубчатой передачи с передаточным отношением равным единице, заключающийся в том, что зубчатые колеса вводят в зацепление при последовательном перезацеплении ведущего колеса с ведомым колесом, фиксируют величину кинематической погрешности передачи в каждом положении и по полученным значениям кинематической погрешности определяют положение зубчатых колес относительно друг друга.
при котором кинематическая погрешность передачи минимальна. В этом способе последовательное перезацепление ведущего колеса осуществляется на всех зубьях 2.
Недостатком известного способа сборки является его невысокая производительность ввиду необходимости многократного контроля кинематической погрешности и оценки возможных близких значений величин наибольшей кинематической погрешности, по которым судят о наиболее удачном положении зубчатых колес.
Цель изобретения - повышение производительности сборки.
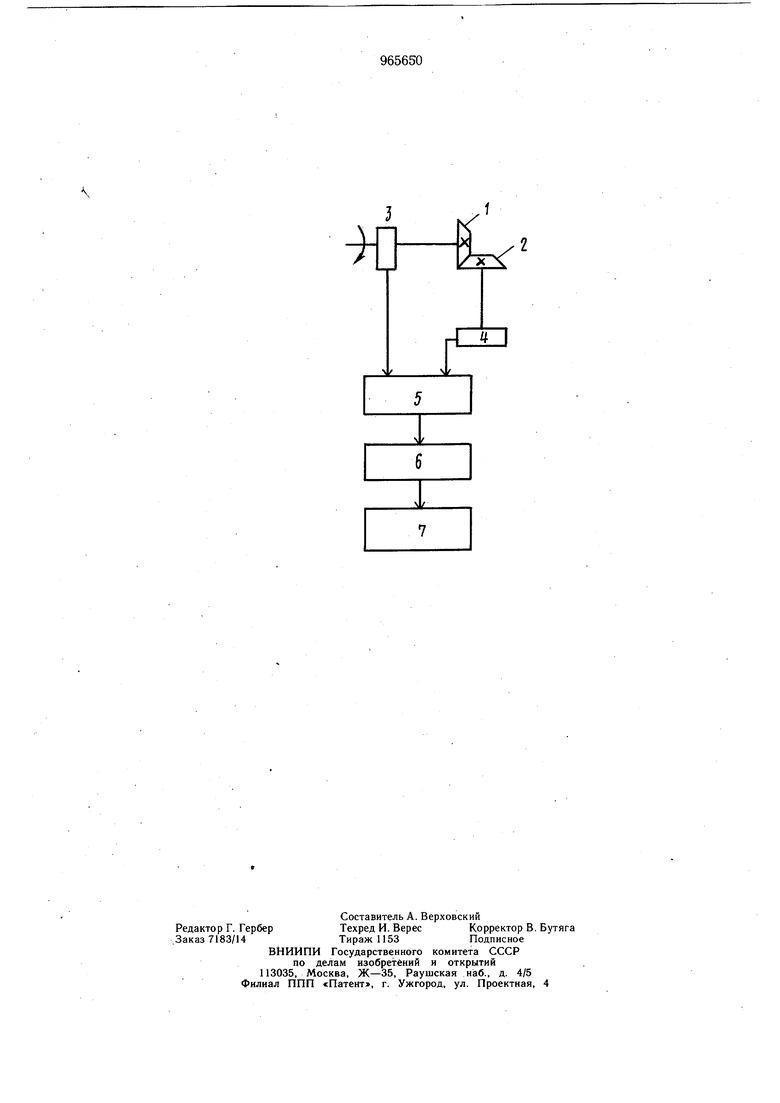
Указанная цель достигается тем, что согласно способу сборки зубчатой передачи с передаточным отношением равным единице заключающемуся в том, что зубчатые колеса вводят в зацепление при последовательном перезацеплении ведущего колеса с ведомым, фиксируют величину кинематической погрешности пер&лачн в каждом положении и по полученным значениям кинематической погрешности определяют положение зубчатых колес, относительно друг друга, при котором кинематическая погрешность передачи минимальна, поворот ведущего колеса осуществляют в прямом и обратном направлениях по отнощению к исходному положению на величину, не превышающую половину оборота колес, фиксируют значения амплитуд первых гармонических составляющих кинематических погрещностей в исходном положении и после поворота ведущего колеса в прямом и обратном направлениях и разворачивают ведущее колесо от исходного положения на угол д, определяемый из выражения (Ч| 2А -А2-Аз где :f - величина угла поворота в прямом и обратном направлениях , А, А и Ад - значения амплитуд первых гармонических составляющих кинематических погрещностей соответственно в исходном положении и после поворота ведущего колеса в прямом и обратном направлениях. На чертеже показана схема способа сборки зубчатой передачи. Способ осуществляется следующим образом. Пару зубчатых колес 1 и 2 устанавливают на заданном межосевом расстоянии в исходном положении, когда любой зуб Ьсдущего колеса может контактировать с любым зубом ведомого колеса. Ведущему зубчатому колесу 1 дают вращение и получают с помощью датчиков 3 и 4 кинематической погрешности кинематомера 5, анализатора 6 гармоник и самописца 7 амплитуду А первой гармонической составляющей кинематической погрещности. Затем ведущее колесо выводят из зацепления, поворачивают его при неизменном положении ведомого колеса 2 на несколько угловых шагов в любом направлении, например по часовой стрелке, на угол относительно исходного положения и определяют амплитуду AJ, первой гармоники кинематической погрешности для этого относительного положения зубчатых колес. После этого аналогичным образом определяют амплитуду АЗ для случая, когда ведущее колесо поворачивают от исходного положения на угол j в направлении, обратном тому, какое было выбрано в предыдущем случае. Значение угла f удобнее выбирать в пределах 60°-120°. Используя заданное значение .f и полученные в результате измерений величины А, А и А, определяют угол на который необходимо повернуть веДушее колесо от исходного положения для достижения относительного положения зубчатых колес в паре, при котором значение величины первой гармонической составляю щей кинематической погрешности пары мини-мально. Значение угла л определяется из выраже --tuiHfi). Поскольку зубчатые колеса можно смещать одно относительно другого на величину угла, равную или кратную целому числу угловых щагов, то и величина Д, окончательно принимается равной ближайщему целому числу угловых шагов. Применение предлагаемого способа позволяет повысить производительность сборки и кинематическую точность собранной зубчатой передачи. Формула изобретения Способ сборки зубчатой передачи с передаточным отнощением равным единице, заключающийся в том, что зубчатые колеса вводят в зацепление при последовательном перезацеплении ведущего колеса с ведомым, фиксируют величину кинематической погрешности передачи в каждом положении и по полученным значениям кинематической погрешности определяют положение зубчатых колес относительно друг друга, при котором кинематическая погрешность передачи минимальна, отличающийся тем, что, с целью повышения производительности сборки, поворот ведущего колеса осуществляют в прямом и обратном направлениях „ц отношению к исходному положению на величину, не превышающую половину обо рота колес, фиксируют значение амплитуд первых гармонических составляющих кинематических погрещностей в исходном положении и после поворота ведущего колеса в прямом и обратном направлениях и разворачивают ведущее колесо от исходного положения на угол Д, определяемый из выражения«1Чт uric-arc где f - величина угла поворота в прямом обратном направлениях; А,,АгИАд -значение амплитуд первых гармонических составляющих кинематических погрещностей соответственно в исходном положении и после поворота ведущего колеса в прямом и обратном направлениях Источники информации, принятые во внимание при экспертизе 1. Шищков В. А. Анализ погрешностей кинематических цепей станков. - Межву зовский сборник Взаимозамендемость и технические изменения в машиностроении. М., Машгиз, 1961, № 3, с. 105-111. 2. Автсфское свидетельство СССР № 741005, кл. F 16 Н 1/02, 1978 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ сборки зубчатой передачи | 1988 |
|
SU1581936A1 |
| Способ сборки цилиндрической зубчатой передачи | 1977 |
|
SU682694A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЦИКЛИЧЕСКОЙ ПОГРЕШНОСТИ ЗУБЦОВОЙ ЧАСТОТЫ В ЗУБЧАТОЙ ПЕРЕДАЧЕ | 2004 |
|
RU2265199C1 |
| Червячная передача Литвинюка | 1986 |
|
SU1395870A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ШЕСТЕРЕН И КОНТРОЛЯ СБОРКИ ИЗ НИХ МНОГОПОТОЧНЫХ ВЕРТОЛЕТНЫХ РЕДУКТОРОВ | 2002 |
|
RU2236341C1 |
| Устройство для измерения гармоническихСОСТАВляющиХ КиНЕМАТичЕСКОй пОгРЕшНОСТизубчАТыХ пЕРЕдАч | 1979 |
|
SU815481A1 |
| МЕХАНИЧЕСКАЯ БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА | 2002 |
|
RU2211971C1 |
| ЗУБЧАТО - ИМПУЛЬСНЫЙ ВАРИАТОР | 2016 |
|
RU2636440C2 |
| Способ измерения кинематической погрешности зубчатых колес | 1978 |
|
SU744222A1 |
| Способ диагностики дефектов зубьев зубчатых колёс редуктора газотурбинного двигателя | 2021 |
|
RU2783467C1 |