(Л
с
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ сборки зубчатой передачи | 1981 |
|
SU965650A1 |
| Способ контроля кинематической точ-НОСТи зубчАТыХ КОлЕС | 1979 |
|
SU846990A1 |
| Способ испытаний на высокоинтенсивные ударные воздействия приборов и оборудования | 2022 |
|
RU2794872C1 |
| УГЛОВАЯ ЗУБЧАТАЯ МУФТА ДЛЯ ПОДВИЖНЫХ ВАЛОВ | 2009 |
|
RU2418211C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ, СКОРОСТИ И УСКОРЕНИЯ ОБЪЕКТА В ПАССИВНОЙ СКАНИРУЮЩЕЙ СИСТЕМЕ ВИДЕНИЯ | 2018 |
|
RU2700275C1 |
| Стол зубообрабатывающего станка | 1988 |
|
SU1516262A2 |
| Способ измерения ускорения | 1991 |
|
SU1774267A1 |
| СПОСОБ ПОЛУЧЕНИЯ ОТРАЖАЮЩЕЙ ПОВЕРХНОСТИ РЕФЛЕКТОРА ЗЕРКАЛЬНОЙ АНТЕННЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2067340C1 |
| Способ центрирования двух независимо вращающихся круговых растров | 1990 |
|
SU1747884A1 |
| Многополюсный вращающийся трансформатор | 1984 |
|
SU1262650A1 |

Изобретение относится к машиностроению, к способам сборки точных зубчатых передач компенсационным методом. Цель изобретения - повышение производительности сборки. Это достигается за счет уменьшения числа операций. Согласно способу при помощи кинематомера измеряют суммарные амплитуды R 1 и R 2 кинематической погрешности передачи из двух колес с передаточным отношением, равным единице в двух положениях взаимного сцепления с углом φ O разворота между ними, и фазовое смещение ψ амплитуд. Далее расчетным путем находят амплитуды A 1 и A 2 собственных погрешностей колес и вычисляют дополнительный угол φ к, на который нужно развернуть колеса для обеспечения минимальной погрешности по зависимостям: φ K=180°- (φ 0-δ 0)
δ 0 =ARCCOSR 2[A 2+*A 2)/2A TA 2]. Описание содержит примеры реализации способа. 4 ил.
Изобретение относится к машиностроению и может быть использовано при сборке точных зубчатых передач компенсационным методом.
Цель изобретения - повышение производительности сборки зубчатой передачи за счет уменьшения числа операций.
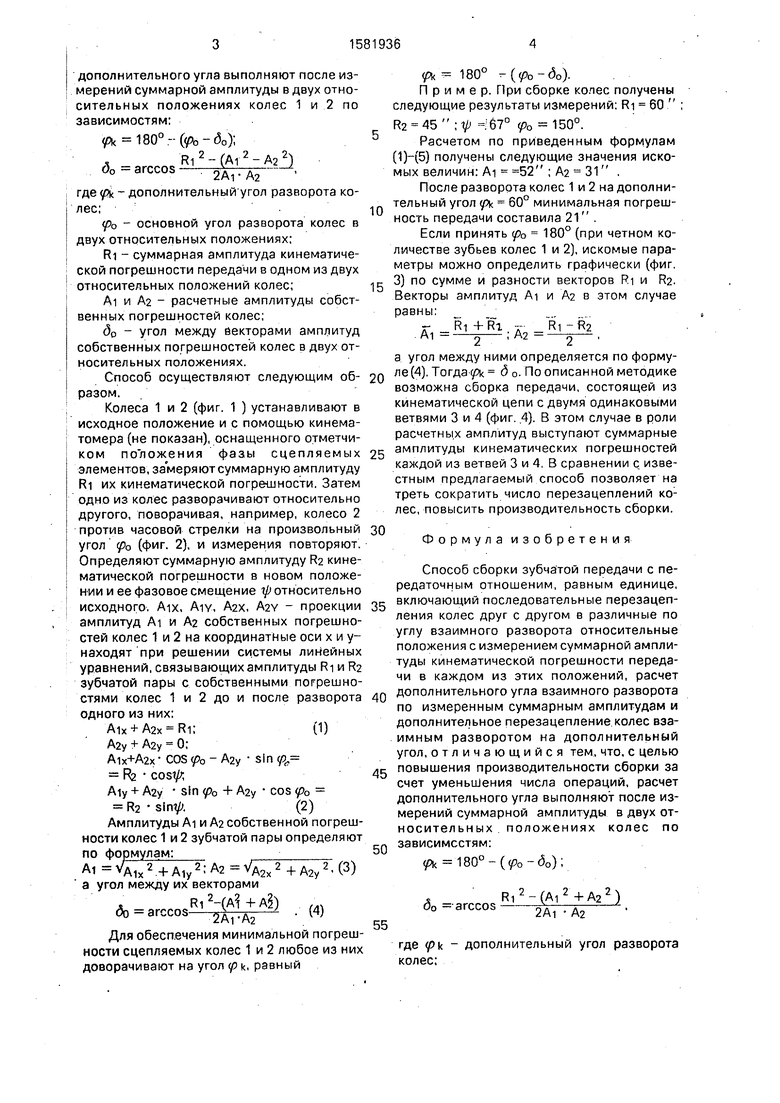
На фиг. 1 изображена зубчатая передача из двух зацепляющихся колес с передат- дочным отношением, равным единице; на фиг. 2 - векторы амплитуд (суммарных и собственных) погрешностей в двух относительных положениях перезацепленных колес; на фиг. 3 - вариант расположения векторов амплитуд при перезацеплении на угол, равный 180° на фиг. 4 - вариант использования методики способа в передаче,
состоящей из кинематической цепи с двумя одинаковыми ветвями.
Способ сборки зубчатой передачи состоящей из двух зацепляющихся колес 1 и 2 (фиг 1) с передаточным отношением, равным единице, включает последовательные перезацепления колес 1 и 2 друг с другом в различные по углу взаимного разворота относительные положения с измерением суммарной амплитуды кинематической погрешности передачи в каждом из этих положений, расчет дополнительного угла взаимного разворота колес 1 и2по измеренным суммарным амплитудам кинематических погрешностей и дополнительное пере зацепление колес 1 и 2 с взаимным разворотом нэ дополнительный угол Расчет
ел со
ю
iOJ ON
дополнительного угла выполняют после измерений суммарной амплитуды в двух отно- сительных положениях колес 1 и 2 по зависимостям:
0с 180°(рь-(5о);
д0 arccos
R1Z-(AH-A2
2Ai А2
где дополнительный угол разворота колес;
ро - основной угол разворота колес в двух относительных положениях:
RI - суммарная амплитуда кинематической погрешности передачи в одном из двух относительных положений колес;
AI и Аа - расчетные амплитуды собственных погрешностей колес;
(5р - угол между векторами амплитуд собственных погрешностей колес в двух, относительных положениях.
Способ осуществляют следующим образом.
Колеса 1 и 2 (фиг. 1 ) устанавливают в исходное положение и с помощью кинема- томера (не показан), оснащенного отметчиком положения фазы сцепляемых элементов, за меряют суммарную амплитуду RI их кинематической погрешности. Затем одно из колес разворачивают относительно другого, поворачивая, например, колесо 2 против часовой стрелки на произвольный угол р0 (фиг. 2), и измерения повторяют. Определяют суммарную амплитуду Ra кинематической погрешности в новом положении и ее фазовое смещение t/ относительно исходного. AIX, AIY, A2X, A2Y - проекции амплитуд AI и Аа собственных погрешностей колес 1 и 2 на координатные оси х и у- находят при решении системы линейных уравнений, связывающих амплитуды RI и R2 зубчатой пары с собственными погрешностями колес 1 и 2 до и после разворота одного из них:
Aix + A2x Ri;(1)
А2у А2у - 0;
Alx+A2x COS р0 А2у sin р
Ra cost/ ;
Aly + А2у Sin (po + A2y COS po
R2 slnV.(2)
Амплитуды Ai и А2 собственной погрешности колес 1 и 2 зубчатой пары определяют
по формулам:
Al Alx2+Aiy2:A2 VA2x2+A2y2,(3)
а угол между их векторами
. Ri2-() ,.. do arccos2X1 А2- (4)
Для обеспечения минимальной погрешности сцепляемых колес 1 и 2 любое из них доворачивают на угол р k, равный
0
5
0
5
0
рь - 180° -(). Пример. При сборке колес получены следующие результаты измерений: RI 60
R2 45 ;V 67° ро 150°.
Расчетом по приведенным формулам (1)-(5) получены следующие значения искомых величин: AI 52 ; А2 31 .
После разворота колес 1 и 2 на дополнительный угол рк. - 60° минимальная погрешность передачи составила 21 .
Если принять р0 180° (при четном количестве зубьев колес 1 и 2), искомые параметры можно определить графически (фиг. 3) по сумме и разности векторов Pi и R2. Векторы амплитуд AI и А2 в этом случае равны:
.
а угол между ними определяется по формуле (4). Тогда (pk 5 о. По описанной методике возможна сборка передачи, состоящей из кинематической цепи с двумя одинаковыми ветвями 3 и 4 (фиг. 4). В этом случае в роли расчетных амплитуд выступают суммарные амплитуды кинематических погрешностей каждой из ветвей 3 и 4. В сравнении с известным предлагаемый способ позволяет на треть сократить число перезацеплений колес, повысить производительность сборки.
Формула изобретения
Способ сборки зубчатой передачи с передаточным отношеним, равным единице,
включающий последовательные перезацепления колес друг с другом в различные по углу взаимного разворота относительные положения с измерением суммарной амплитуды кинематической погрешности передачи в каждом из этих положений, расчет
дополнительного угла взаимного разворота по измеренным суммарным амплитудам и дополнительное перезацепление колес взаимным разворотом на дополнительный угол, отличающийся тем, что, с целью
повышения производительности сборки за счет уменьшения числа операций, расчет дополнительного угла выполняют после измерений суммарной амплитуды в двух от- носительных положениях колес по зависимсстям:
pk 180°-();
«. Ri2-(Ai2 +A22) д0 arccosА ,
где рь - дополнительный угол разворота колес;
ро - основной угол разворота колес в двух относительных положениях;
д0 - угол между векторами амплитуд собственных погрешностей колес в двух относительных положениях;
-/
/
ФигЛ
RI - суммарная амплитуда кинематиче- ской.погрешности передачи в одном из двух . относительный положений колес;
AI и А2 - расчетные амплитуды собственных погрешностей колес.
Фиг. 2
4t
/
7
ФигЛ
| Способ сборки зубчатой передачи | 1981 |
|
SU965650A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
