Изобретение относится к машиностроению и может быть использовано в зуборезных станках и измерительных приборах.
Цель изобретения - повышение точности передачи за счет автоматического исправления кинематической погрешности.
На чертеже схематически изображена червячная передача, общий вид.
Червячная передача содержит корпус 1, ведущий вал 2 с опорами 3 и 4, установленными в опорных втулках 5 и 6 по посадке скольжения. Опорные втулки 5 и 6 жестко установлены в корпусе 1 на таком расстоянии друг от Друга, которое, позволяет ведущему валу 2 вместе с опорами перемещаться в осевом направлении в пределах, соиз- меримых с величиной кинематической погрешности передачи, выраженной в единицах длины.
С одной стороны корпуса 1 ведущий вал 2 взаимодействует с пружиной 7, расположенной в обойме 8, а между пружиной 7 и обоймой 8 установлен на резьбе регулировочный винт 9, воздействующий на пружину 7. На ведущем валу 2 жестко установлен червяк 10, .находящийся в зацеплении с червячным колесом 11, жестко устанановленным на ведомом валу 12. Между червяком 10 и червячным колесом 11 установлена жесткая механическая обратная связь, включающая установленный на ведомом валу 12 эксцентрик 13,
В корпусе 1 шарнирно установлен двуплечий рычаг 14 с упорами 15 на одном плече. В рычаге 14 между упорами, 15 выполнено отверстие, в котором свободно размещен конец ведущего ва ла 2. Между упорами 15 и опорой 3 установлена втулка 16, которая имеет , возможность перемещения вместе с ве- дзтцим валом 2 в осевом направлении в пределах кинематической погрешности передачи. Па другом конце рычага 14 на резьбе установлен винт,17 с контргайкой. Между сферическим концом винта 1 7 и рабочей поверхностью зксцентрика 13 установлен щуп 18, отслеживающий изменения профиля эксцентрика 13 при его вращении.
Под воздействием усилия пружины 7 щуп 18 находится в постоянном контакте с рабочей поверхностью эксцентрика 13. Усилие пружины регулируется с помощью винта 9. Рабочая поверхность
o
5 0
5 о
0
5
0
5
эксцентрика 13 отражает характер распределения кинематической погрешности червячной передачи и ее величину в каждой точке окружности червячного . колеса 11 и рассчитывается на основе предварительного измеренргя действительного значения кинематической по- грещности червячной передачи. Величина разности между наибольшим и наименьшим радиус-вектором эксцентрика 13 прямо пропорциональна величине кинематической погрещности за полный оборот червячного колеса 11, т.е.
макс мич Ч мим соответственно максимальный и минимальный радиус-векторы; ft - величина неисправленной кинематической погрешности; К - коэффигщент пропорциональности, определяемый соотношением плеч рычага 14 и передаточ1-Пз1М отношением червячйой передачи.
Эксцентрик 13 установлен на ведомом валу 12 относительно червячного колеса П таким образом, чтобы величина разности радиус-векторов при любом угле поворота червячного колеса 11 в пределах одного оборота была прямо пропорциональна действительному значению кинематической погрешности на данном угле поворота и противоположна ей по знаку. При этом рабочий угол поворота эксцентрика 13 отсчитывается от точки контакта щупа 18 с его рабочей поверхностью, а червячного колеса - от точки контакта витка червяка 10 с зубом червячного колеса П .
Угол, измеренный между точками начала отсчета угла поворота эксцентрика 13 и червячного колеса П относительно их общей оси вращения, является углом фазового сдвига между кривой эксцентрика 13 и кривой распределения кинематической погрешности. Р1а чертеже угол фазового сдвига равен 90 с При другом конструктивном исполнении он может быть иным.
Передача работает следующим образом.
При сообщении червяку 10 рабочего вращательного движения приводятся во вращение червячное колесо 11 и эксцентрик 13.
Пуп 18, перемещающийся в направляющей втулке, воспринимает изменение радиус-вектора в точке контакта его с рабочей поверхностью э ксцент- рика 13. При уменьшении величины раднус-вектора в процессе вращения эксцентрика 13 (спад кривой эксцентрика щуп 18 получает свободу перемещения в направлении к оси вращения эксцент- рика 13. При возрастании величины радиус-вектора (нарастание кривой эксцентрика) эксцентр1ск 13 перемещает щуп 18 в направлении от оси его вращения.
В первом (он соответствует показанному на чертеже) под действием усилия пруиины 7 смещаются влево / вдоль оси ведущий вал 2 с опорами 3 и 4, втулка 16, которая давит.на ynoры 15 и поворачивает рычаг 14 на оси При этом винт 17 перемещает щуп 18 вправо до соприкосновения с рабочей поверхностью эксцентрика 13.
Линейное смещение червяка 10 вдоль оси влево вызывает дополнительньй поправочный поворот червячного колеса 11 по часовой стрелке.
Во втором случае (при.нарастании кривой эксцентрика) щуп 18 получает линейное смещение от эксцентрика 13 влево, рычаг 1Д поворачивается при этом против часовой стрелки, а червяк с ведущим валом 2 смещается вправо (в сторону пружины 7) вдоль оси. При этом червячное колесо 11 будет повернуто на величину поправочного угла против часовой стрелки.
Рабочий и поправочньй углы поворота суммируются на ведомом валу 12.
Расчетная величина поправочного угла в каждой точке окружности червячного колеса 11 равна действительному значению кинематической погрещ- ности в этой точке и противоположна ей по знаку, что обеспечивает исправ- леьше погрешности.
При повороте червячного колеса 1I и эксцентрика 13 на 360 все элементы передачи, включая червяк 10 и червячное колесо.1, приходят в исходное положение, предшествовавшее началу вращения червяка 10. Указанный процесс работы передачи является циклическим и повторяется на каждом обороте ведомого колеса червячной пере-;- дачи.
Математическое уравнение процесса исправления погрешности представляет- ся следующим образом. Предположим, что червяк 10 из исходного произвольного выбранного положения повернут на угол {« , при этом червячное коле
0
5
0
5
0
5
0
5
0
5
со 11 и эксцентрик 13 будут, поверну-- ты на угол ot° i,-o ±д° tA, гдесг° - угол поворота чер вячного колеса 1 1; ijj - передаточное отношение червячной передачи; Л° неисправленная кинематическая погрешность червячной пере- на угле поворота ci ; Л - поправочный угол поворота червячного колеса 11, обусловленный изменением радиус-вектора эксцентрика 13 на угле поворота.
Величина разности радиус-векторов, соответствующая любому углу поворота червячного колеса I1 из любого произвольного выбранного положения, принята с учетом обеспечения равенства абсолютных значений кинематической-по-, греганости t.° и поправочного угла й ,
т.е. А,
й при противоположности их
знаков (направление поворота).
При этом знак + соответствует повороту в направлении рабочего движения червячного колеса II, знак - означает поворот в обратном направлении. При соблюдении этого условия угол поворота червячного колеса 11 примет выражение oi° i oi, и будет равен расчетному.
Кинематическая погрешность таким образом будет исправлена.
Формз ла изобретения
Червячная передача, содержащая корпус, размещенные в нем ведущий вал, установленньй в опорах с возможностью совместного перемещения в осевом направлении,червяк, жестко соединенный с ведущим валом, ведомый вал и жестко установленное на нем червячное колесо, взаимодействующее с червяком, отличающаяся тем, что, с целью повышения точности передачи за счет автоматического исправления кинематической погрешности, она снабжена жесткой механической обратной связью между червяком и чер вячным колесом, включающей установленный на ведомом валу эксцентрик, закрепленный шарнирно в корпусе двуплечий рычаг с упорами на одном из плеч, втулку, установленную на веду щем валу между одной из опор, и упорами для взаимодействия с ними, винт, установленный на другом плече рычага, и щуп, установленньв между винтом и эксцентриком для взаимодействия с ними.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕНД ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ УСТАНОВКИ УПРАВЛЯЕМЫХ КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА | 1994 |
|
RU2089845C1 |
| Основный регулятор ткацкого станка | 1986 |
|
SU1342947A1 |
| СТАНОК ДЛЯ ОБРАБОТКИ ЦИКЛОИДАЛЬНОГО ПРОФИЛЯ ЗУБА ПРЯМО- И КОСОЗУБЫХ ЦИЛИНДРИЧЕСКИХ ЦИКЛОИДАЛЬНЫХ ЗУБЧАТЫХ КОЛЕС | 2018 |
|
RU2688114C1 |
| МОТАЛЬНЫЙ МЕХАНИЗМ ДЛЯ ПРЯДИЛЬНЫХ и КОЛЬЦЕКРУТИЛЬНЫХ МАШИН | 1965 |
|
SU177306A1 |
| РЕГУЛЯТОР ТОРМОЗА ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2448289C2 |
| Механизм регулируемого эксцентрикового узла | 1989 |
|
SU1700294A1 |
| Счетчик весового количества жидкости | 1975 |
|
SU546782A1 |
| ИМПУЛЬСНЫЙ МЕХАНИЧЕСКИЙ ВАРИАТОР | 1991 |
|
RU2011075C1 |
| ТЕЛЕСКОП | 2002 |
|
RU2227925C2 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ФАЗ ГАЗОРАСПРЕДЕЛЕНИЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2016 |
|
RU2634345C1 |
Изобретение относится к машиностроению и может быть использовано в зуборезных станках и измерительных приборах. Цель изобретения - повышение точности передачи за счет автоматического исправления кинематической погрешности. Вал 2 вместе с опорами 3 и 4 имеет возможность осевого смещения в корпусе 1. На ведомом валу 12 жестко установлены червячное колесо 11 и эксцентрик 13, рабочая поверх- ность которого отражает характер распределения кинематической погрешности червячной передачи и ее величину 77 в каждой точке окружности червячного колеса 1I и рассчитывается на основе предварительного измерения действительного значения кинематической погрешности червячной передачи.. Передача предусматривает жесткую механическую обратную связь между червяком 10 и червячным колесом II по следующей цепи: опора 3 ведущего вала 2, втулка 16, упоры 15 двуплечего рычага 14, шарнирно.закрепленного в корпусе 1, винт 17, щуп 18, эксцент: ик 13, ведомый вал 12. Эксцентрик 13 ус тановлен на валу 12 относительно червячного колеса 11 таким образом, что величина разности радиус-векторов его при любом угле поворота червячного колеса 1I в пределах одного оборота прямо пропорциональна действительному значению кинематической погрешности на данном угле поворота и противоположна ей по знаку. При работе червяч- ной передачи ее кинематическая по-, грешность устраняется автоматически, 1 ил. я 00 со ел 00 -s|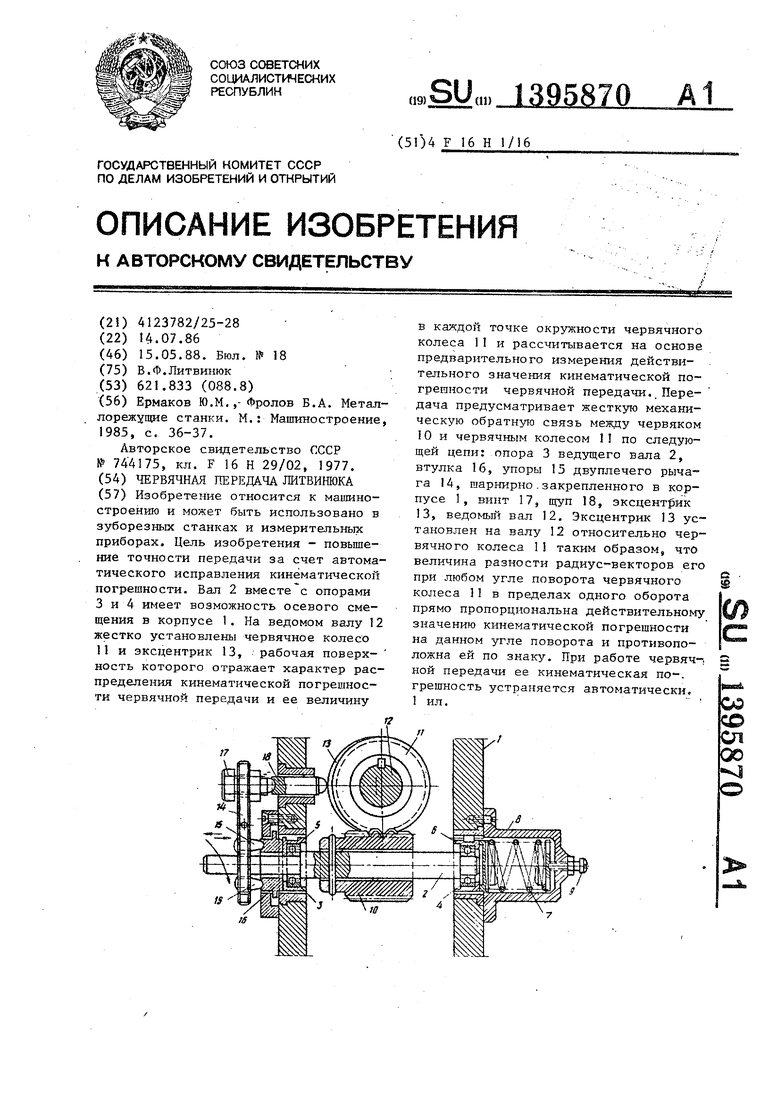
| Ермаков Ю.М.,- Фролов Б.А | |||
| Металлорежущие станки | |||
| М.: Машиностроение, 1985, с | |||
| Коридорная многокамерная вагонеточная углевыжигательная печь | 1921 |
|
SU36A1 |
| Привод возвратно-поступательного перемещения | 1977 |
|
SU744175A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
