(54) МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство манипулятора | 1988 |
|
SU1572807A1 |
| СХВАТ МИКРОМАНИПУЛЯТОРА | 2004 |
|
RU2259915C1 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2378102C2 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2374064C1 |
| Манипулятор | 1982 |
|
SU1041283A1 |
| МИКРОСИСТЕМНЫЙ ЗАХВАТ | 2015 |
|
RU2598416C1 |
| Рука манипулятора | 1987 |
|
SU1450995A1 |
| Схват манипулятора | 1990 |
|
SU1785896A1 |
| Электромагнитный схват | 1990 |
|
SU1798187A1 |
| Промышленный робот | 2015 |
|
RU2654096C2 |
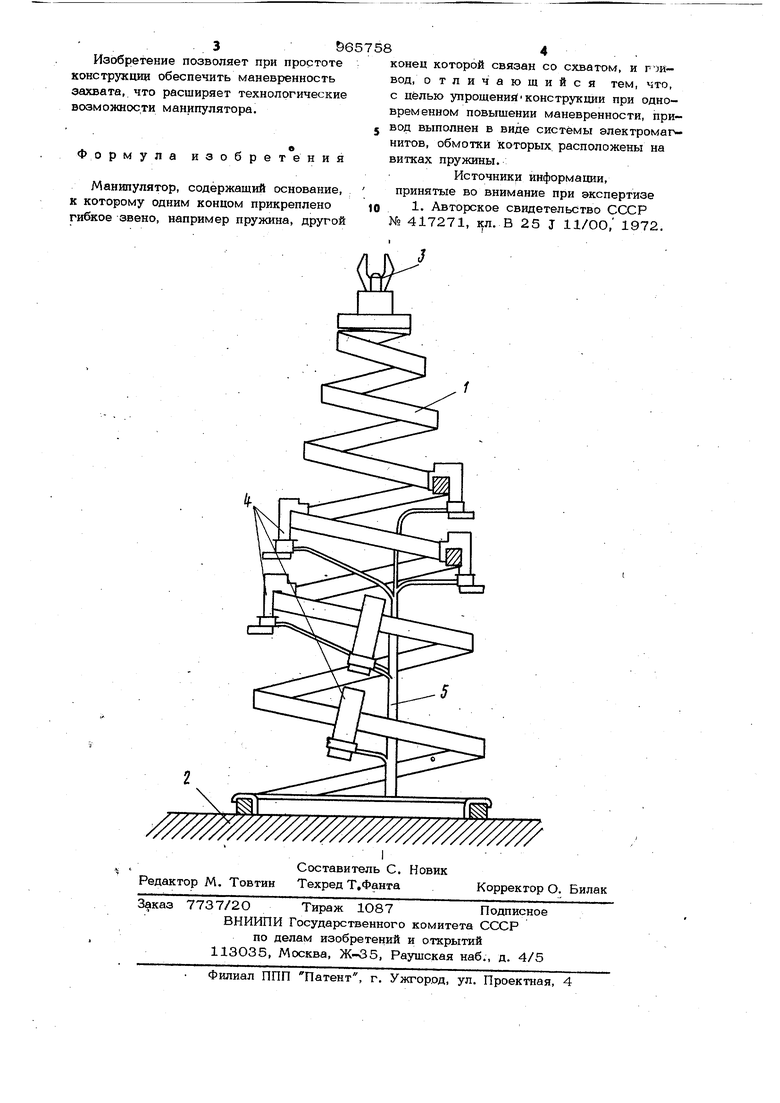
Изобретение относится к машинострое нию, в частности к конструкциям манипуляторов. Известен манипулятор, содержащий ос нование, к которому одним концом прикреплено гибкое звено, например, пружин другой конец которой связан со схватом, и привод 1. Известный манипулятор имеет малую маневренность, в частности он не позволяет обходить препятствия и выполнять другие приемы позиционирования схвата. Цель изобретения - повьпыение маневренности. Цель достигается тем, что привод вы- полнен в виде системы электромагнитов, обмотки которых расположены на витках пружины.. На чертеже изображен предлагаемый манипулятор. Манипулятор состоит из гибкого звена - пружины 1, которая закреплена одним концом на основании 2, а на втором конце пружины укреплен схват 3. Привод выполнен в виде системы электромагнитов 4, обмотки которыхI закреплены на вит- ках пружины 1. Обмотки электромагнитов запитываются по проводам 5Работа осуществляется следующим образом. При отсутствии токд в обмотках электг ромагнитов положение пружинь 1, а следовательно, и схвата 3 в пространстве определяется силами упрзугости пружины и силами тяжести схвата и рабочего тела (на чертеже не показан). При малом весе схвата и рабочего тела пружина будет находиться в вертикальном положении. При включении питания ряда обмоток электромагнитов 4, соответствующие витки пружины 1 будут сближаться, а пружина дагибаться. Дда рбесп еЧёдая требуемого перемещения схвата от : системы управления (не показана) включают питание соответствующих обмоток. Для уменьшения усилий деформации пружины она может быть- вьтопнена конической.
