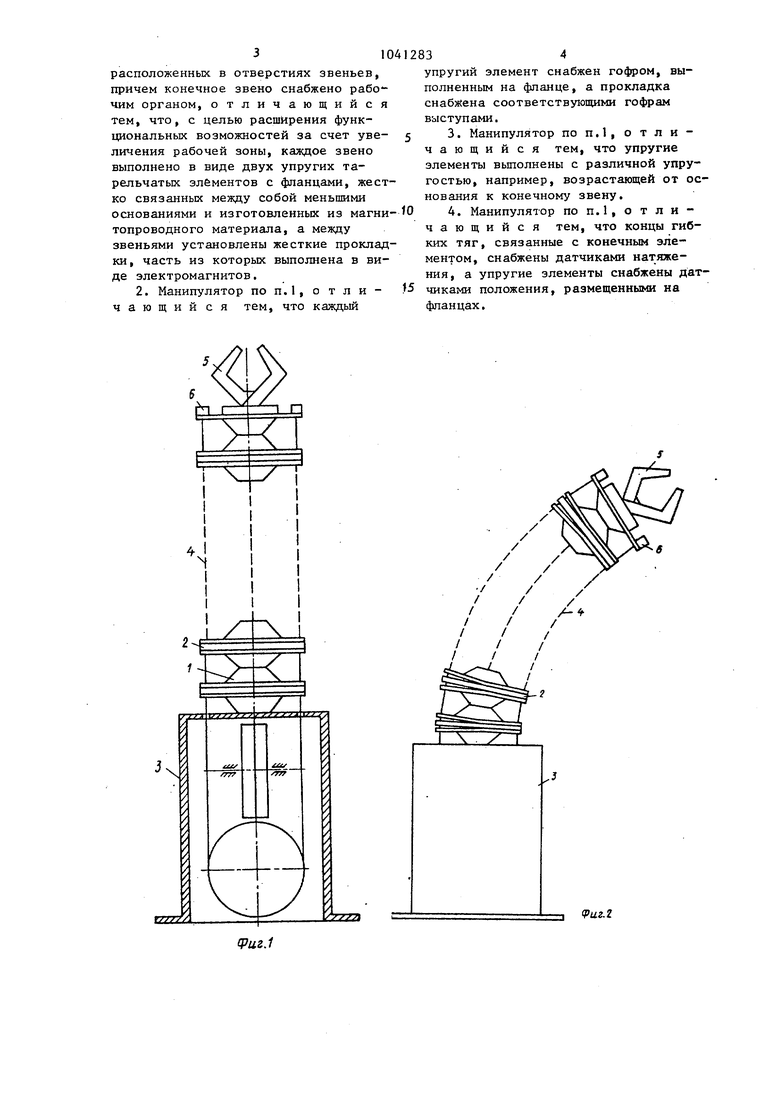
Изобретение относится к манипуляторам, предназначенным для работы в условиях промьшленного производства, под водой и в открытом космосе при проведении монтажа оборудования сбора образцов и т.д. Цель изобретения -.расширение функциональных возможностей за счет увеличения рабочей зоны. На фиг. 1 изображен манипулятор, общий вид; на фиг.2 - то же, в промежуточном рабочем положении; на фиг. 3 - упругий тарельчатый элемент с фланцами; на фиг. 4 - то же, вид сверху; на фиг. 5 - звено в виде жестко связанных между собой меньшими основаниями двух тарельчатых элементов; на фиг. 6 - прокладка, вид сбоку; на фиг. 7 - то же, вид сверху; на фиг. 8 - прокладка, выпол ненная в виде электромагнита; на фиг. 9 - привод гибких тяг; на фиг. 10 - то же, вид сбоку. Манипулятор содержит звенья 1, кинематически связанные между собой через прокладки 2, привод 3 с основанием и гибкие тяги 4, связывающие звенья 1 с приводом 3. На последнем звене 1 установлен схват 5 с самостоятельным приводом (на чертеже не показан) . Концы гибких тяг 4 сн абжены регулируемыми элементами 6 крепления, например, типа винт - гайка с датчиками натяжения тяг (на чертеже не показаны). Каждое звено 1 манипулятора выпол нено из двух идентичньк частей,, каждаА из которых представляет собой тарельчатый упругий элемент с шанца ми 7 и конусными углублениями 8. На фланцах 7 выполнены гофры 9 и отверстия 10 для гибких тяг 4. Тарельчатые элементы жестко связаны между собой меньшими основаниями. Фланцы тарельчатых элементов снабжены датчиками положения (на чертеже не показаны) . Манипулятор может быть собран из тарельчатых элементов с различной упругостью, в зависимости от выбранного закона формы рабочей зоны,(Напри мер с упругостью, возрастающей от ос нования к последнему звену 1. Прокладки 2 имеют основание 11 из недеформируемого материала, снабженное выступом 12, соответствующим канавке гофра 9 тарельчатого элемента, а также втулкой 13 с отверстием для гибкой тяги 4, причем втулка 13 образует с гибкой тягой 4 пару с малым коэффициентом трения.Часть прокладок 2 может быть выполнена в виде электромагнита с обмоткой 14, при этом звенья 1 имеют магнитопроводные участки 15. Привод выполнен в виде двигателя 16 с установленным на валу червяком 17, связанным с червячным колесом 18, вьшолненньш заодно с барабаном 19 для попарно соединенных тяг. Манипулятор работает следующим образом. При подаче питания на двигатель 16 вращение червяка 17 через червячное колесо 18 (с передаточным отнощением, например, 1:100) преобразуется в поступательное перемещение гибких тяг -4, при этом одна из тяг сматывается с барабана 19, а другая наматывается на барабан. Концы гибких тяг, связанные с последним звеном 1, воздействуют на него, что приводит к деформации фланцев 7 тарельчатых элементов, передающейся через прокладку 2 следующему звену 1. При этом прокладка 2 занимает промежуточное пространственное положение между двумя звеньями 1 (фиг.2), а наличие гофров 9 с канавками на фланцах тарельчатых элементов и выступов 12 на проклад.ках предотвращает взаимное скольжение звеньев 1 и прокладки 2. В зависимости от степени деформации с|шанцев 7 тарельчатых элементов манипулятор занимает то или иное .положение в пределах рабочей зоны.При необходимости изменения конфигурации рабочей зоны включаются электромагниты для фиксации звеньев 1 (всех или же некоторых из них, в зависимости от выбранной формы рабочей зоны) , которые при этом исключаются из процесса деформирования, и рабочая зона ciгжaeтcя в соответствии с.числом зафиксированных элементов. Такое выполнение манипулятора обеспечивает увеличение его рабочей зоны,, а также повышает его технологичность и снижает материалоемкость. Фор мула изобретения 1„ Манипулятор, содержащий звенья, кинематически связанные между собой и с приводом посредством гибких тяг, расположенных в отверстиях звеньев, причем конечное звено снабжено рабо чим органом, отличающийся тем, что, с целью расширения функциональных возможностей за счет увеличения рабочей зоны, каждое звено выполнено в виде двух упругих тарельчатых элементов с фланцами, жест ко связанных между собой меньшими основаниями и изготовленных из магни топроводного материала, а между звеньями установлены жесткие проклад ки , часть из которых выполнена в виде электромагнитов. 2. Манипулятор поп.1,отличающий ся тем, что каждый 1 34 упругий элемент снабжен гофром, выполненным на фланце, а прокладка снабжена соответствующими гофрам выступами. 3.Манипулятор по п.1, о т л и чающийся тем, что упругие элементы вьшолнены с различной упругостью, например, возрастающей от основания к конечному звену. 4.Манипулятор по п.1, о т л и чающийся тем, что концы гибких тяг, связанные с конечным элементом, снабжены датчиками натяжения, а упругие элементы снабжены датчиками положения, размещенными на фланцах.
Риг.г
7 Ю / /
Ч
It
7
JLL
(риг. 5
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука манипулятора | 1987 |
|
SU1450995A1 |
| Манипулятор | 1991 |
|
SU1757876A1 |
| МИКРОСИСТЕМНЫЙ ЗАХВАТ | 2015 |
|
RU2598416C1 |
| Манипуляционная система | 1990 |
|
SU1784451A1 |
| Манипулятор | 1982 |
|
SU1085805A1 |
| Манипулятор | 1984 |
|
SU1229027A1 |
| Линейный электропривод | 1987 |
|
SU1529364A1 |
| ИСПОЛНИТЕЛЬНЫЙ ОРГАН МАНИПУЛЯТОРА | 1989 |
|
SU1832619A1 |
| Манипулятор для плоских стеклоизделий | 1987 |
|
SU1549743A1 |
| АВТОМАТ АВАРИЙНОГО ОТКЛЮЧЕНИЯ ГАЗОПРОВОДА | 1998 |
|
RU2138720C1 |



Изобретение относится к манипуляторам, предназначенным для работы в условиях промышленного производства, под водой и в открытом космосе при проведении монтажа оборудования, сбора образцов и т.д. Цель изобретения - расширение его функциональных возможностей за счет увеличения рабочей зоны. Манипулятор включает звенья, кинематически связанные посредством гибких тяг с приводом и схватом. Звенья представляют собой жестко соединенные меньшими основаниями тарельчатые упругие элементы с фланцами, между фланцами соседних звеньев установлены жесткие недеформируемые прокладки. Часть прокладок может быть вьшолнена в виде электромагнитов, при включении которых звенья фиксируются в заданном положении и исключаются из процесса деформирования, что и обеспечивает из§ менение конфигурации рабочей зоны манипулятора. 3 з.п. ф-лы, 10 ил. (Л
(Риг.
П 11
L
///////////А /////////7/// (Риг.&
Х„4VU8.7
иг,е
| Патент Великобритании № 1148365, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
