Изобретение относится к машиностроению, а именно к рабочим органам манипуляторов, и может быть использован в качестве схвата манипулятора.
Известен схват манипулятора, содержащий упругие ленты, концы которых закреплены на корпусе, а середина связана с приводом линейного перемещения, причем между лентами размещены электромагниты,, .
Известен также схват манипулятора, содержащий корпус с обмоткой, на котором установлена оболочка и пакет плоских пружин из немагнитного материала, причем корпус выполнен в виде пластин из магнитол роводного материала с наружными выступами для образования полюсов, причем оболочка выполнена замкнутой и закреплена на выступах.
Недостатком прототипа.является сложность конструкции.
Целью изобретения является упрощение конструкции схвата.
Цель достигается тем, что стержни выполнены в виде постоянных магнитов и соединены с корпусом с помощью упругих элементов, изменяющих электрическое сопротивление при растяжении, на корпусе смонтирован электромагнит, причем вышеуказанные упругие элементы связываются программным устройством.
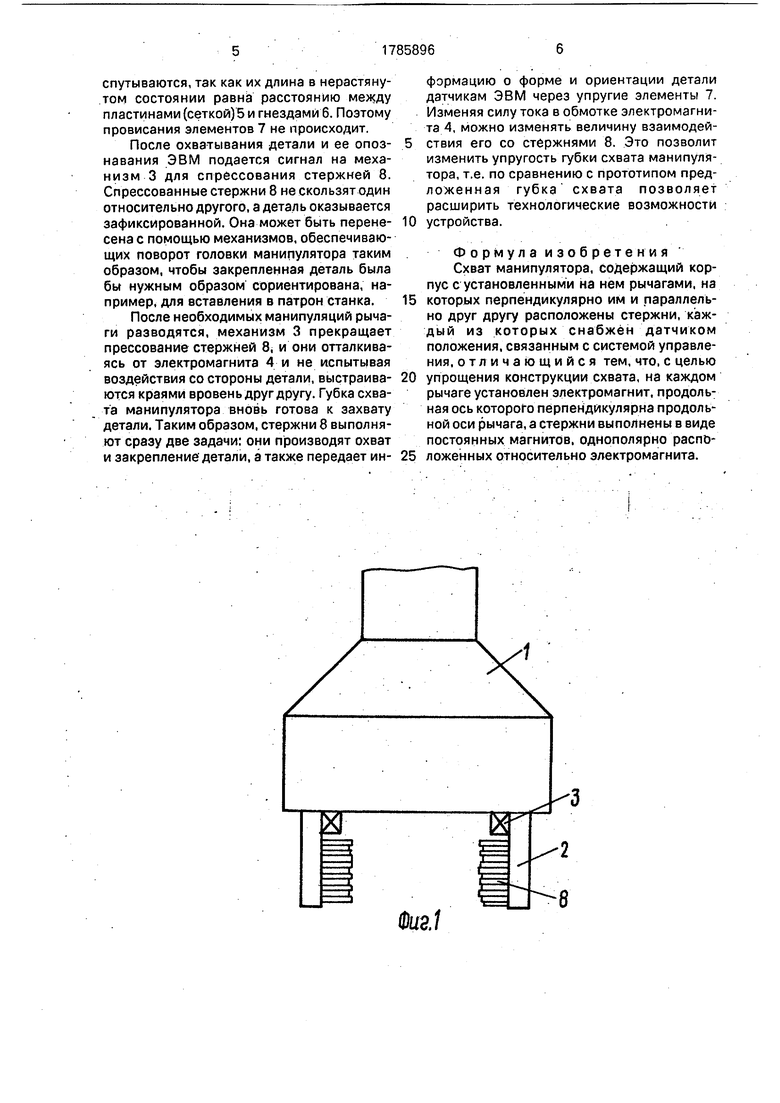
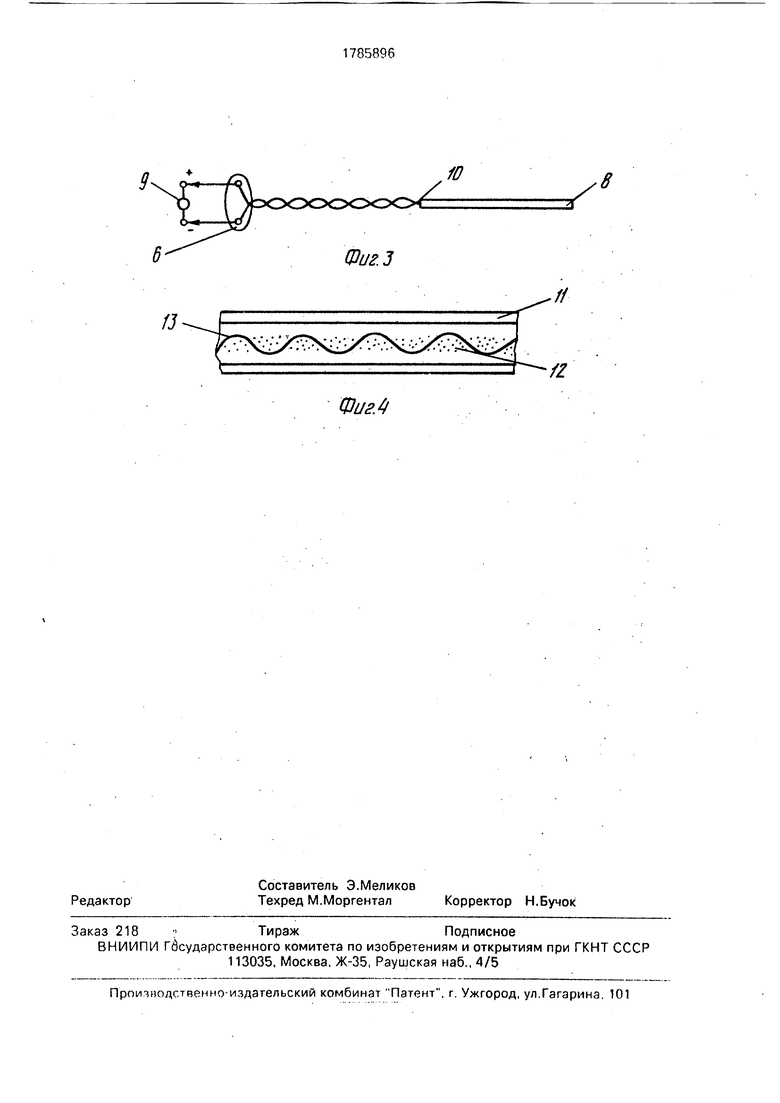
Изобретение поясняется чертежами, где на фиг. 1 дан общий вщ устройства; на фиг. 2 - схема губки схвата манипулятора; на фиг. 3 - схема варианта крепления упругих элементов к стержням и в гнезде; на фиг. 4 - вариант выполнения упругого элемента,
Устройство содержит корпус 1 с рычагами, снабженными силовым механизмом, например гидроцилиндром. Рычаги снабжены электромагнитом 4, а также металлической алюминиевой (или другой неферромагнитной) перфорированной пластиной (сеткой). На поверхности электромагнита 4 располагаются гнезда б, в которых производится электрическое и механическое соединение упругих элементов 4. Упругие элементы соединены с параллельными стержнями 8, выполненными в виде электромагнитов. Гнезда, имеют электрические выводы на ЭВМ, снабженные потенциометром 9.
Крепление упругих элементов 7, в частности, может быть следующим: упругий эле- . мент 7 продет через ушко 10 стержня 8, переплетен и концы его соединены с одним из гнезд 6. В данном случае потенциометр подсоединен к концам упругого элемента 7.
Упругие элементы 7 могут быть выполнены, например, в виде каучукового жгута, состоящего из двух слоев: 11 - слой каучука;
12 - слой каучука, содержащего, например, серебряный (посеребренный, графитовый) порошок. Внутри слоя 12 может быть размещена скрученная по спирали нерастяжимая
нить. Размер упругих элементов 7 в нерастянутом состоянии равен расстоянию от гнезда до пластины (сетки).
Упругие элементы 7 могут быть получены следующим образом. В расплав каучука
0 вводят графитовый (серебряный, посеребренный) порошок и выдавливают (вытягивают) жгут. Обвязывают полученный жгут тонкой нерастяжимой нитью и покрывают непроводящим каучуковым слоем. Нить
5 можно наматывать и на непроводящий каучуковый слой. Далее полученный жгут разрезают на нужные отрезки.
Устройство работает следующим образом.
0 На электромагнит 4 подают электрический ток. Стержни 8 отталкиваются от электромагнита 4 и растягивают упругие элементы 7. В гнезда 6 на упругие элементы 7 подается напряжение. Схват готов к рабо5 те. Для захвата детали сближаются рычаги с помощью механизма (на чертеже не указан). Стержни 8, скользя один относительно другого, охватывают деталь, повторяя ее форму. Сила отталкивания электромагнита
0 4 и стержней 8 компенсируется силой притяжения, обусловленной элементами 7. При охвате детали некоторые из стержней 8 в большей степени, некоторые в меньшей (в зависимости от формы детали) будут вдав5 ливаться в тело губки против силы рттал- кивания полюсов магнитов, И сталь оказывается охваченной стержнями 8, а элементы 7 в разной степени растянутыми. Информацию о растяжении элементов 7
0 получают, пропуская по ним ток. При большом натяжении элемента 7 у него оказывается большое сопротивление, так как частицы серебра отдаляются друг от друга. Сигнал подается на ЭВМ. Измеряя сопро5 тивление элементов 7 с помощью потенциометра 9, ЭВМ определяет форму детали. Для этого ЭВМ сначала определяет номинальное сопротивление элемента 7, сравнивая его с сопротивлением элемента 7 в
0 нерастянутом состоянии. Датчики ЭВМ фиксируют положение всех стержней 8. В оперативной памяти ЭВМ формируется образ схваченной детали. Производится сличение образа, хранящегося в памяти ЭВМ,
5 с образом, передаваемым датчиками. В результате ЭВМ дает сигнал силовым механизмам 3 манипулятора произвести новый захват либо на включение силового механизма 3 для спрессования стержней и увеличения жесткости захвата. Элементы 7 не
спутываются, так как их длина в нерастянутом состоянии равна расстоянию между пластинами (сеткой) 5 и гнездами 6. Поэтому провисания элементов 7 не происходит.
После схватывания детали и ее опознавания ЭВМ подается сигнал на механизм 3 для спрессования стержней 8. Спрессованные стержни 8 не скользят один относительно другого, а деталь оказывается зафиксированной. Она может быть перенесена с помощью механизмов, обеспечивающих поворот головки манипулятора таким образом, чтобы закрепленная деталь была бы нужным образом сориентирована, например, для вставления в патрон станка.
После необходимых манипуляций рычаги разводятся, механизм 3 прекращает прессование стержней 8 и они отталкиваясь от электромагнита 4 и не испытывая воздействия со стороны детали, выстраиваются краями вровень друг другу. Губка схвата манипулятора вновь готова к захвату детали. Таким образом, стержни 8 выполняют сразу две задачи: они производят охват и закрепление детали, а также передает информацию о форме и ориентации детали датчикам ЭВМ через упругие элементы 7. Изменяя силу тока в обмотке электромагнита 4, можно изменять величину взаимодействия его со стержнями 8. Это позволит изменить упругость губки схвата манипулятора, т.е. по сравнению с прототипом пред- ложенная губка схвата позволяет расширить технологические возможности
устройства.
Формула изобретения Схват манипулятора, содержащий корпус с установленными на нем рычагами, на
которых перпендикулярно им и параллельно друг другу расположены стержни, каждый из которых снабжён датчиком положения, связанным с системой управления, отличающийся тем, что, с целью
упрощения конструкции схвата, на каждом рычаге установлен электромагнит, продольная ось которого перпендикулярна продольной оси рычага, а стержни выполнены в виде постоянных магнитов, однополярно расположенных относительно электромагнита.
Фи г. 4
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват манипулятора | 1983 |
|
SU1090548A1 |
| Схват | 1986 |
|
SU1388281A1 |
| Схват для хрупких деталей | 1984 |
|
SU1284827A1 |
| Схват манипулятора | 1981 |
|
SU982901A1 |
| Схват манипулятора | 1980 |
|
SU965765A1 |
| Схват манипулятора | 1986 |
|
SU1380938A1 |
| МНОГОПОЗИЦИОННОЕ ЗАХВАТНОЕ УСТРОЙСТВО МАНИПУЛЯТОРА | 1992 |
|
RU2033918C1 |
| Захват манипулятора | 1979 |
|
SU844262A1 |
| Схват промышленного робота | 1986 |
|
SU1308464A1 |
| Схват манипулятора | 1982 |
|
SU1042993A1 |
Использование: машиностроение, в захватных органах манипуляторов. Сущность изобретения: схват содержит корпус 1 с установленными на нем рычагами. На рычагах перпендикулярно им и параллельно друг другу расположены стержни 8. Каждый из стержней снабжен датчиком положения, а на каждом рычаге установлен электромагнит 4,продольная ось которого перпендикулярна продольной оси рычага. Стержни 8 выполнены в виде постоянных магнитов, од- нополярно расположенных относительно электромагнита 4, Датчики положения связаны с системой управления. При захвате детали стержни 8 охватывают деталь, повторяя ее форму, и смещаются один относительно другого, а датчики положения стержней подают сигнал в систему управления, где происходит формирование образа захваченной детали. 4 ил.
| Схват манипулятора | 1980 |
|
SU905064A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
