Изобретение относится к машинострое- 1нию и может быть использовано в робртах- манипуляторах.
Целью изобретения является расширение технологических возможностей за счет изменения длины всей руки или отдельных |ее частей.
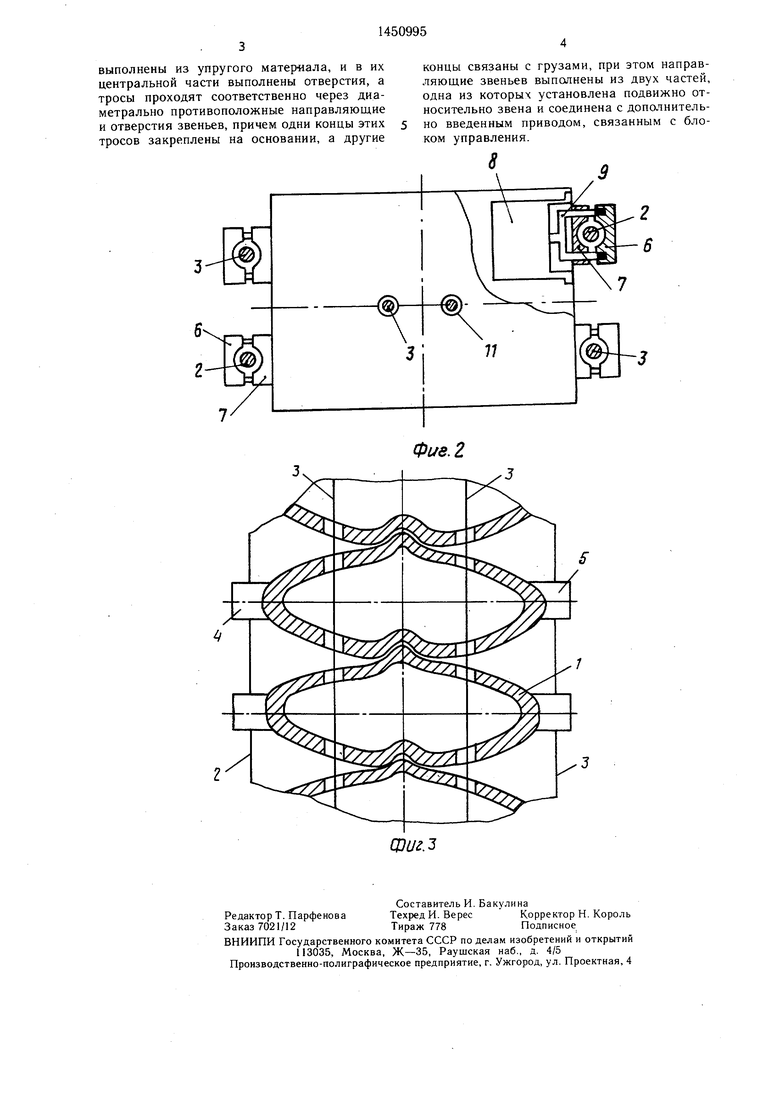
На фиг. 1 изображена предлагаемая рука :манипулятора, общий вид; на фиг. 2 - зве- JHO руки манипулятора, вид сверху; на фиг. 3- вариант вьтолнения звеньев руки манипулятора.
Рука манипулятора состоит из звеньев 1, представляющих собой элементы овальной формы, выполненные из упругого материала, Например из стальных пластин. Звенья 1 |уложены одно на другое на гибких тягах 2 |и тросах 3. На периферии звеньев 1 руки в плоскости, проходящей через больщие оси овалов звеньев, выполнены направляющие 4 гибких тяг 2 и направляющие 5 тросов 3. |Направляющие 4 и 5 выполнены из двух 1частей: подвижной части 6 и неподвижной |части 7 относительно звеньев 1. Подвижные части 6 направляющих снабжены индивидуальными приводами (зажимными устройствами), обеспечивающими возможность фиксации гибких тяг 2 и тросов 3. Индивидуаль- ;ные привода расположены внутри звеньев и выполнены, например, в виде электромагнитов 8 с подвижными сердечниками 9, связанными с подвижными частями 6 направляющих. Привод индивидуальных приводов :подключен к блоку управления рукой манипулятора (не показан). В качестве блока управления может быть использована, например, система управления робота РМ-01. Гибкие тяги 2 с одной стороны неподвижно закреплены на последнем (связанным со схватом) звене руки, а с другой стороны присоединены к приводам (не показаны). Тросы 3 с одной стороны неподвижно закреплены на основании 10 руки, протянуты через направляющие 5 и через отверстия 11, выполненные в звеньях 1. Для предотвращения смещения звеньев 1 одного относительно другого в поперечном направлении на звеньях 1 могут быть выполнены взаимосвязанные выступы и канавки (фиг. 3). К другому концу каждого из тросов 3 подвешены грузы 12. На свободном конце руки манипулятора закреплен схват 13 с приводом (не показан).
Рука манипулятора работает следующим образом.
Требуемая жесткость руки и зона обслуживания достигаются одновременным и одинаковым натяжением гибких тяг 2 (изменяется длина руки). При дополнительном натяжении одной из гибких тяг 2 последняя, будучи прикрепленной к последнему звену руки, поворачивает данное звено, которое в свою очередь поворачивает следующее за
5
0
5
0
5
0
5
0
5
ним звено и так далее. Таким образом поворачивается вся совокупность звеньев, вызывающая изгиб руки манипулятора в целом. Для фиксации изгиба, например, верхней части звеньев по команде из блока управления включаются электромагниты 8 направляющих 4 этих звеньев (с обеих сторон звеньев), втягивая сердечники 9 с подвижными частями 6 направляющих 4. При этом положение верхней части звеньев фиксируется. При дальнейшем изменении разницы в натяжении тяг 2 изменяется величина изгиба оставщихся (незафиксированных) звеньев, и после включения электромагнитов 8 этих звеньев по команде ii3 блока управления фиксируется изгиб оставшейся части руки манипулятора. После захвата детали схватом 13 для ее укладки в определенном месте рабочего пространства манипулятора иногда достаточно (а при работе в ограниченном пространстве необходимо) изменять конфигурацию и длину только части руки, связанной со схватом при сохранении конфигурации нижней части руки. Для этого по команде из блока управления сначала включаются электромагниты 8 направляющих 5 для звеньев нижней части руки, конфигурацию и длину которой следует сохранить, и затем выключаются электромагниты всех направляющих 4 гибких тяг 2. При этом взаимное положение звеньев нижней части руки фиксируется, а положение звеньев верхней части руки (а также длина и жесткость верхней части руки) относительно зафиксированной части определяются натяжением тяг 2. Натяжение тросов 3 при любой конфигурации руки обеспечивается за счет силы веса грузов 12. При изменении разницы в натяжении тяг 2 изменяются конфигурация и длина верх- ней части руки, и деталь укладывается в требуемой точке. Таким образом, производя фиксацию части звеньев с помощью зажимных устройств направляющих 5 тросов 3 поворотом оставшихся звеньев с последующей их фиксацией, получают дополнительно требуемую ориентацию схвата.
Формула изобретения
Рука манипулятора, содержащая основание, звенья, выполненные в виде элементов овальной формы и имеющие направляю- дие, расположенные в плоскости, проходящей через большие оси овалов звеньев, гибкие тяги, размещенные в направляющих и одними концами связанные с индивидуальными приводами, а другими концами - с конечным звеном, а также захват, отличающаяся тем, что, с целью расщирения технологических возможностей за счет изменения длины всей руки или отдельных ее частей, она снабжена блоком управления, тросами и грузами по числу тросов, при этом звенья
выполнены из упругого материала, и в их центральной части выполнены отверстия, а тросы проходят соответственно через диаметрально противоположные направляющие и отверстия звеньев, причем одни концы этих тросов закреплены на основании, а другие
концы связаны с грузами, при этом направляющие звеньев выполнены из двух частей, одна из которых установлена подвижно относительно звена и соединена с дополнительно введенным приводом, связанным с блоком управления.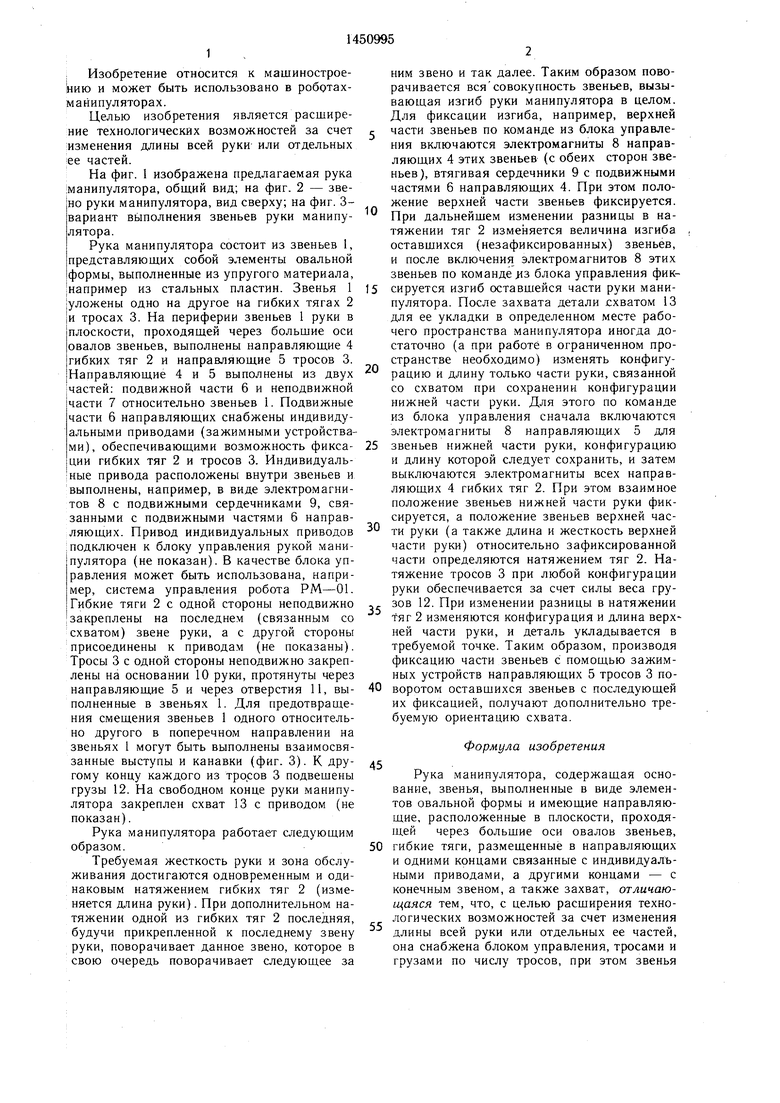
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1987 |
|
SU1517252A1 |
| Рука манипулятора | 1984 |
|
SU1332690A1 |
| Схват манипулятора | 1986 |
|
SU1342730A1 |
| Устройство для перемещения захвата манипулятора | 1982 |
|
SU1079599A1 |
| Рука тензорного манипулятора | 1983 |
|
SU1114545A1 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| Рука манипулятора | 1985 |
|
SU1263520A1 |
| Манипулятор | 1979 |
|
SU831607A1 |
| Исполнительный орган робота | 2015 |
|
RU2653397C2 |
| Автоматизированный комплекс для многопереходной штамповки | 1986 |
|
SU1349851A1 |
Изобретение относится к машиностроению и может быть использовано в роботах- манипуляторах. Целью изобретения является расширение технологических возможностей за счет изменения длины всей руки или отдельных ее частей. Для этого звенья 1 уложены одно на другое на гибких тягах 2 и тросах 3. На периферии звеньев 1 руки в плоскости, проходящей через большие оси овалов звеньев, выполнены направляюш.ие 4 гибких тяг 2 и направляющие 5 тросов 3. Направляющие 4 и 5 выполнены из дву.х частей, одна из частей является подвижной относительно звеньев 1. Гибкие тяги 2 с одной стороны неподвижно закреплены на последнем звене руки, а с другой стороны присоединены к приводам. Тросы 3 с одной стороны неподвижно закреплены на основании 10 руки, протянуты через направляющие 5 и через отверстия 11, выполненные в звеньях 1. К другому концу каждого из тросов 3 под- вещены грузы 12. Чтобы изменить конфигурацию и длину только части руки, связанной со схватом при сохранении конфи гурации нижней части руки, по команде из блока управления сначала включаются электромаг ниты направляющих 5 для звеньев нижней части рука, а затем выключаются электромагниты всех направляющих 4 гибких тяг 2. При этом взаимное положение звеньев нижней части руки фиксируется, а положение звеньев верхней части руки относительно зафиксированной части определяется натяжением тяг 2. 3 ил. i (Л -t viS 4 СП О со со ел ю
Фиа.2
| Рука манипулятора | 1981 |
|
SU1007959A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
