( 5 ) СИСТЕМА УПРАВЛЕНИЯ РЕГУЛИРУЕМЫМ НАСОСОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидропривод одноковшового экскаватора | 1981 |
|
SU1004551A1 |
| Объемный гидропривод транспортного средства | 1987 |
|
SU1426859A1 |
| ЭЛЕКТРОННО-ГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ОТВАЛОМ БУЛЬДОЗЕРА | 2016 |
|
RU2624079C1 |
| Гидропривод одноковшового фронтального погрузчика | 1991 |
|
SU1799958A1 |
| Гидропривод экскаватора | 1980 |
|
SU949090A1 |
| Гидропанель управления реверсом привода ползуна и приводом подач | 1974 |
|
SU566976A1 |
| Гидравлическая система экскаватора | 1990 |
|
SU1728543A1 |
| Механизм регулирования частоты вращения вала дизеля экскаватора | 1983 |
|
SU1276844A1 |
| Гидропривод шагового толкателя | 1987 |
|
SU1523746A1 |
| Система сервоуправления гидроприводом экскаватора | 1983 |
|
SU1079780A1 |
Изобретение относится к гидроавто матике и может быть использовано, например, в гидравлических приводах строительных и дорожных машин. Известна система управления регулируемым насосом, содержащая установочный гидроцилиндр, связанный с регулировочным органом насоса, следящий золотник для управления установочным гидроцилиндром, связанный с последним гидролиниями и кинематиЧес кой цепью обратной связи-по положению, клапан ИЛИ, соединенный входами с рабочими гидролиниями насоса, распределитель с торцовыми полостями и толкателем, связанным с выходом клапана ИЛИ, гидррлинии питания слива и сервауправления Недостатками известной Еистемы являются низкие коэффициент полезного действия и надежность, так как она не обеспечивает бесступенчатого регулирования давления. Цель изобретения - повышение коэффициента полезного действия и надежд ности, Поставленная цель достигается тем, что система выполнена с тремя гидролиниями сервоуправления и снабжена гидроцилиндром - датчиком с подпружиненным подвижным штоком для перемещения золотника и вторым распределителем с торцовыми полостями и с двумя гидролиниями обратной связи по давлению, соединенными с рабочими гидролиниями насоса, при этом две гидролинии сервоуправления соединены с торцовыми полостями второ го распределителя, третья гидролиния сервоуправления - с торцовой полостью первого распределителя со стороны толкателя, а гидролиния питания - с его противоположной торцовой полостью и установочным гидроцилиндром. При этом первый распределитель выполнен с четырьмя входами и двумя выходами, а второй - с двумя входами и двумя выходами,при этом выходы первого распределителя соединены с гидроцилиндром - датчиком, а дйа входа - с гилролиниями сервоуправления второго распределителя, входы которого связаны с гидролинйями питания и слива, о выходы - с двумя другими входами первого распределителя.
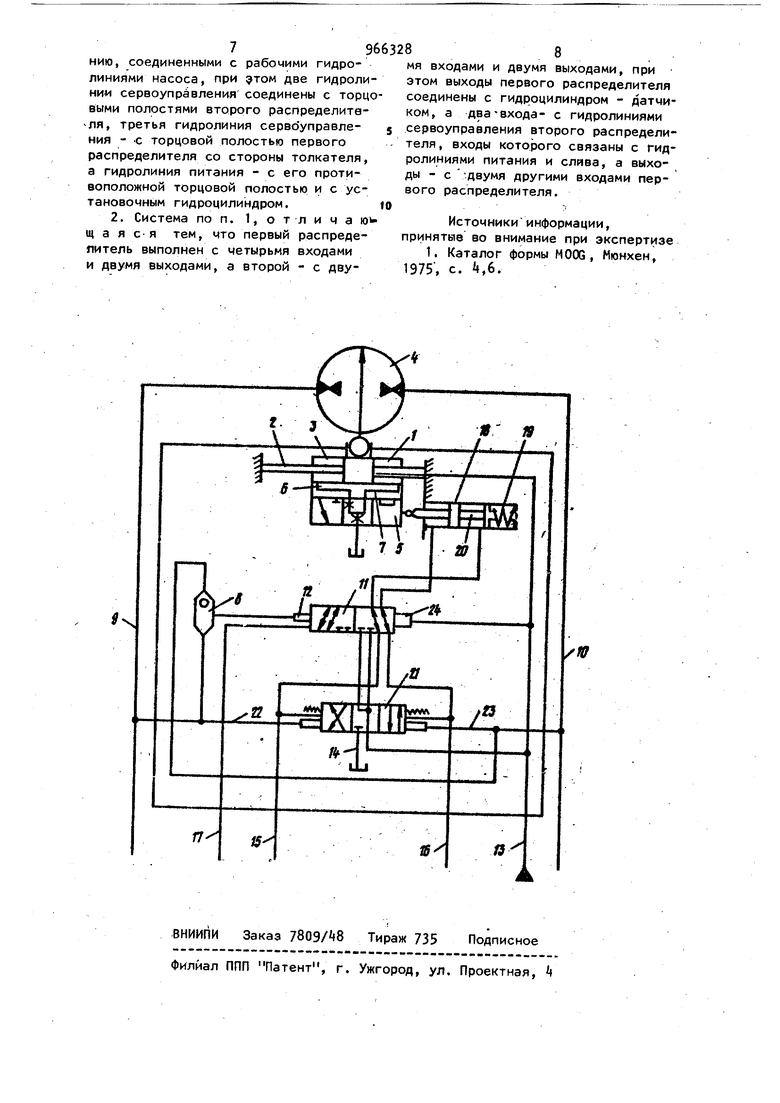
На чертеже изображена схема сиетемы управления регулируемым насосом.
Система содержит установочный гидроцилиндр 1 с нecим aeтpичным штоком 2 и подвижной гильзой 3, свя(ванный с регулирующим ооганом (не изображен) насоса 4, следящий золотник 5 для управления гидроцилиндром 1, связанный с последним гидролиниями 6 и 7 и кинематической цепью обратной связи по положению, образованной благодаря жесткому соединению гильзы 3 с золотником 5 клапан 8 ИЛИ, соединенный входами с рабочими гидролиниями 9 и 10 насоса k, двухпозиционный распределитель 11.с четырьмя входами, двумя выходами, торцовыми полостями (не изображены) и толкателем 12, связанным с выходом клапана 8 ИЛИ.
Система включает гидролиниюi13 питания, гидролинию I слива.и гидролинии 15-17 сервоуправления, а также гидроцилиндр - датчик 18 с подпружиненным тарированной нуль-пружич ной 19 штоком 20 для перемещения золотника 5 и второй распределитель 21 с торцовыми полостями (не изображены), гидролиниями 22 и 23 обратной связи по давлению, соединенными с рабочими гидролиниями 3 и 10 соответственно, имеющий два входа и два выхода.
При этом гидролинии 15 и 16 сервоуправления соединены с торцовыми полостями распределителя 21, гидролиния 17 сервоуправления -с торцовой полостью распределителя 11 со стороны толкателя 12, а гидролиния 13 питания, например, через толкатель 2 - с противоположной торцовой полостью распределителя 11, а также с гидроцилиндром 1, выходы распределителя 11 соединены с гидроцилиндром 18,а два выхода - с гидролиниями 15 и 16 сервоуправления распределитзля 21, входы которого связаны с гидролиниями 13 и 1 питания и слива соответственно, а выходы - с двумя другими входами распределителя 11. Соотношение диаметров толкателей 12 и 24 выбирается таким, что при давлениях в гидролиниях 9 и 10 ниже максимального распределитель 11 находится в позиции, изображенной на чертеже.
Система управления регулируемым
насосом может работать в режиме регулирования расхода либо в режиме регулирования давления.
Система работает следующим образом.
При подаче сигнала управления, например, по гидролинии 15, рабочая жидкость из нее поступает в цилиндр 18, шток 20 которого движется влево, сжимая пружи+iy 19 пропорционально
величине сигнала и перемещая золотник 5 влево. При этом жидкость из гидролинии 13 поступает в полости гидроцилиндра 1, гильза 3 которого перемещается влево, отклоняя регулиру
ющий орган насоса ч влево и обеспечивая подачу рабочей жидкости в гидро|Линию 10, Таким образом, в режиме .регулирования расхода устанавливается расход насоеа 4, соответствующий
величине отклонения регулирующего органа, в свою очередь пропорциональный величине сигнала управления. При подаче сигнала по гидрояинии 16 аналогичный процесс обеспечивает подачу жидкости в рабочую гидролинию 9.
Для перевода насоса k в режим регулирования давления подается сиг- нал по гидролинии 17 на распредели
тель 11, перемещая последний во вторую позицию. Затем по гидролинии 15 подается сигнал управления к торцовой полости распределителя 21, который перемещается влево. поступает в правую полость гидроцилиндра -18, шток которого с помощью золотника 5 приводит в действие .гидроцилиндр 1, как описано. Расход насоса Ц увеличивается этом случае до техПОР, пока давление в рабочей гидролинии 10 не уравновесит действия давления управления на распределитель 21. По достижении равновесия сил, действующих справа и слева на распределитель 21, последний устанавливается в нейтральное положение, при котором полости гидроцилиндра 18 сообщаются, и под действием сжатой пружины 19 шток 20 перемещается вправо в сторону уменьшения рас хода до тех пор, пока давление в магистрали 10 не уменьшится и восстановится первоначальный дисбаланс усилий на распределителе 21, который под действием поданного в начале про цесса управляющего сигнала ВНОВБ перемещается вправо на увеличение расхода насоса 4 в гидролинию 10. В случае возрастания рабочего дав ления в гидролинии 10 до величины, при которой ее воздействие :на распре делитель 21 становится превалирующим описанного равновесия сил не наступает, и распределитель 21, пройдя через нейтральное положение, смешается вле во. В этом случае жидкость поступает в левую полость гидроцилиндра 18, перемещая его шток 20 и золотник 5 вправо. Левая полость гидроцилиндра 1 при этом разобщается с правой и соединяется со сливной гидролинией , а поступающая в правую полость гидоолинии 13 жидкость смещает.гильзу 13 гидроцилиндра 1, а следовательно, и регулиоующий орган насоса k вправо, уменьшая тем самым подачу рабочей жид кости в гидролинию ,10. Если упомянутого уменьшения рабочего давления в гидролинии 10 не наступает, то распределитель 21, совершая описанные возвратно-поступательные движения, автоматически поддерживает такое отклонение регулирующего органа насоса 4, при котором обеспечивается расход, восполняющий лишь внутренние утечки при заданном давлении в рабочей гидролинии 10, величина которого пропорциональна величине управляющего сигнала с гидролинии 15. Таким образом, при работе насоса k в режиме регулирования в гидролинии 10 поддерживается заданнбе рабочее давление при переменном по величине и направлению расхода насоса . При подаче управляющего сигнала в гидролинию 16 аналогичный процесс происходит в гидролинии 9. При работе гидропривода в режиме регулирования расхода насоса в оП. ной из рабочих гидролиний, наппример 9, может возникнуть давление вьше максимально допустимого. В этом случае повышенное давление через толкатель 12 воздействует на распределитель 11 и, преодолев усилие со стороны толкателя 2, находящегося под постоянным давлением гидролинии 13 питания, перемещает распределитель 11 вправо. При этом полости гидроцИлиндра 18 подключаются к выходам распределителя 21, и тем самым осуществляется перевод управления насосом 4 в режим регулирования давления. Согласно описанному процессу регулирова ния насоса в режиме регулирования давления,система отрабатывает уменьшение расхода насога до тех пор, пока давление в гидролинии 9 не станет меньше предельного, после чего распределитель 11 перемещается в ис-ходное положение,и дальнейшее управление йасосом k вновь осуществляется в режиме управления расходом. При работе в описанной ситуации система выполняет защитные функции, предохраняя от перегрузок. Таким образом, система обеспечивает возможность бесступенчатого регулирования расхода и давления насоса, т.е. позволяет контролировать скоростные и силовые параметры работы гидропривода и назначить оптимальный режим работы применительно к характеру преодолеваемых нагрузок. Использование изобретения в гид-. pйBJПИчecкиx приводах строительных и дорожных машин позволяет повысить их коэффициент полезного действия и надежность и тем самым эффективность их применения. Формула изобретения 1. Система управления регулируемым насосом, содержащая, установоч-. ный гидроцилиндр, связанный с регулирующим органом насоса, следящий золотник для управления установочным гидроцилиндром, связанный с последним гидролиниями и кинематической цепью обратной связи по положению, клапан ИЛИ, соединенный входами с рабочими гидролиниями насоса, распределитель с торцовыми полостями и толкателем, связанным с выходом клапа на ИЛИ, гидролинии питания, слива и сервоуправления, отличающаяся тем, что, с целью повышения коэффициента полезного действия и надежности, она выполнена с тремя гидролиниями сервоуправления и снабжена гидроцилиндром - датчиком с подпружиненным подвижным штоком для перемещения золотника и вторым распределителем с торцовыми полостями и с двумя гидролиниями обратной связи по давлению, соединенными с рабочими гидролиниями насоса, при две гидролинии сервоупрйвления соединены с торцовыми полостями второго распределитв-ля, третья гидролиния сервоуправления - С торцовой полостью первого распределителя со стороны толкателя, а гидролиния питания - с его противоположной торцовой полостью и с установочным гидроцилиндром.
Источникиинформации, принятые во внимание при экспертизе
