гидродвигателем 36 стропы, и золотник распределителя 6, соединенный с гидродвигателем 41 ковша, снабжены пружинами большего усилия, чем пружины остальных золотников распределителя. Вторая рабочая линия золотника 16 наклонена к линии 13 питания золотника 21. Рабочие линии золотника 20 подключены к гидродвигателю
41 ковша. Вторая рабочая линия золотника 19 подключена к полости опускания гидродвигателя 36 стрелы. Двухпозиционный золотник 64 расположен между гидролиниями управления золотников 16 и 19, а линия его управления подключена через выход клапана 61 и линию 54 к командоаппарату 60. 2 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система сервоуправления гидроприводом экскаватора | 1975 |
|
SU610950A1 |
| Гидравлический привод экскаватора | 1979 |
|
SU829824A1 |
| Система сервоуправления гидроприводом экскаватора | 1978 |
|
SU964078A1 |
| ГИДРОПРИВОД ОДНОКОВШОВОГО ЭКСКАВАТОРА-ПОГРУЗЧИКА | 1995 |
|
RU2108427C1 |
| Двухпоточный гидравлический привод одноковшового экскаватора | 1984 |
|
SU1164376A1 |
| Гидравлический привод экскаватора | 1972 |
|
SU608892A1 |
| ДВУХПОТОЧНЫЙ ГИДРАВЛИЧЕСКИЙ ПРИВОД ОДНОКОВШОВОГО ЭКСКАВАТОРА | 2006 |
|
RU2334844C1 |
| Двухпоточный гидропривод экскаватора | 1979 |
|
SU903492A1 |
| Двухпоточный гидравлический привод одноковшового экскаватора | 1990 |
|
SU1818425A1 |
| Гидропривод одноковшового экскаватора | 1988 |
|
SU1680885A1 |
Изобретение относится к гидравлическим системам строительно-дорожных машин, а именно к гидросистеме экскаватора. Целью изобретения является повышение надежности путем исключения возможности одновременного включения параллельно питаемых золотников управления. Гидравлическая система экскаватора содержит насосы 1 и 2, каждый из которых подключен к своему гидроуправляемому четырехзолотниковому распределителю 5 (6) с проточным каналом 8 (9), который соединен к гидродвигателям рабочего оборудования 32, 41, 36, 50 и выполнен с параллельными питанием подпружиненных гидроуправляемых золотников 14-16 (17- 19) и последовательно им установленным золотником 20 (21). Гидролинии управления золотников через линии 51-54 (55-58) соединены с двумя командоаппаратами 59, &и 60, снабженными ограничителями 69 максимального угла наклона рукояток 68. Золотник 16 распределителя ,5, соединенный с сл с
Изобретение относится к гидравлическим системам строительно-дорожных машин, а именно к гидросистеме экскаватора.
Целью изобретения является повышение надежности в работе путем исключения возможности одновременного включения параллельно питаемых золотников управления.
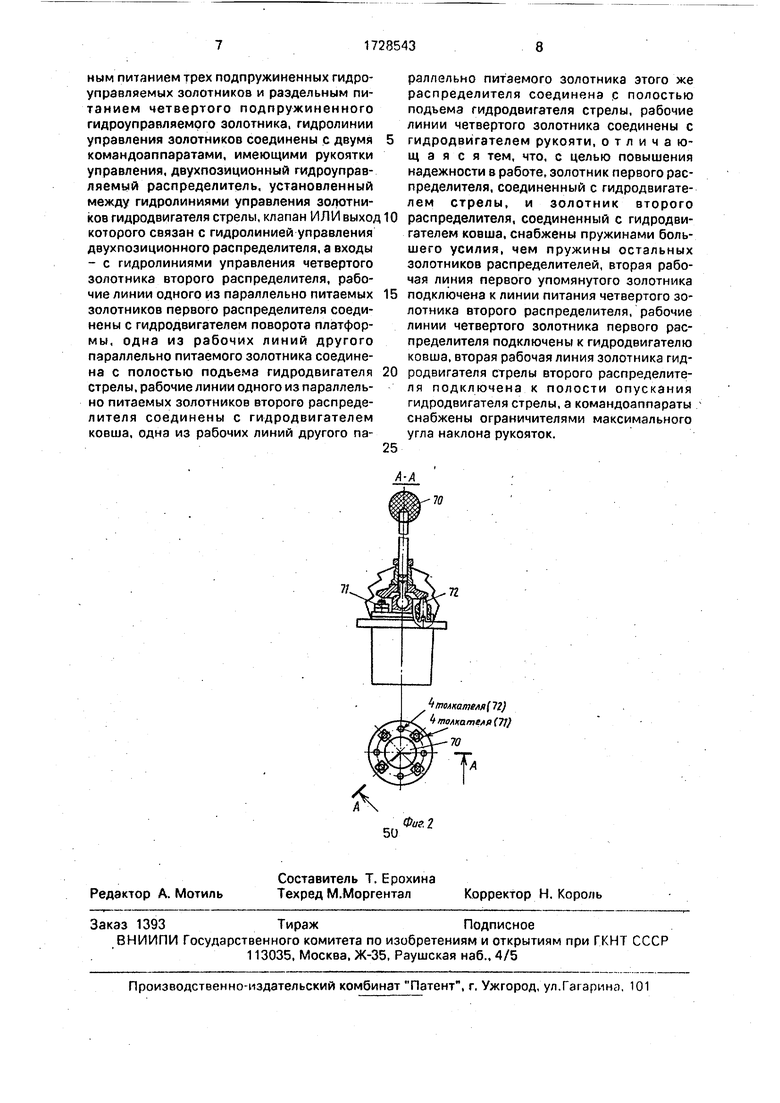
На фиг. 1 приведена схема гидравлического системы экскаватора; на фиг. 2 - рукоятки на корпусе командоаппарата и разрез А-А.
Гидравлическая система экскаватора содержит два насоса 1 и 2, каждый из которых подключен своей напорной линией 3 (4) к соответствующему гидроуправляемому четырехзолотнйковому распределителю 5 (б), а всасывающими линиями - к баку 7. Напорная линия 3 (4) насоса 1 (2) сообщена в распределителе 5(6)с проточным каналом 8 (9). напорной линией 10 (12) и линией 11 (13) питания, осуществляющими параллельное питание трех золотников 14-16(17-19) и раздельное питание четвертого золотника 20(21).
Каждый золотник соединен со сливным каналом 22 (23), с которым через дроссель 24 (25) соединен также проточный канал 8 (9). Участок выхода проточного канала до дросселя соединен линией 26 (27) управления с регулятором соответствующего насоса 1 (2). Золотники 14-16 имеют параллельное питание в распределителе 5. Рабочие отводы 28 и 29 золотника 14 соединены с гидродвигателем, не участвующим в цикле экскавации, например, с гидродвигателем выносных опор. Рабочие отводы 30 и 31 золотника 15 соединены с гидродвигателем 32 поворота платформы, Рабочие отводы 33 и 34 золотника 16 соединены соответственно через обратный клапан 35 с полостью подъема гидродвигателя 36 стрелы и через обратный клапан 37 -с участком
38проточного канала 9 гидрораспределителя 6 между его третьим золотником 19 и четвертым золотником 21. Рабочие отводы
39и 40 четвертого раздельно питаемого золотника 20 соединены с гидродвигателем 41 ковша
Золотники 17-19 имеют параллельное питание в распределителе 6. Рабочие отводы 42 и 43 золотника 17 соединены с гидродвигателем, не участвующим в цикле экскавации, например, с гидродвигателем хода. Рабочие отводы 44 и 45 золотника 18 соединены с гидродвигателем 41 ковша, а
рабочие отводы 46 и 47 золотника 19 - с гидродвигателем стрелы 36. Рабочие отводы 48 и 49 четвертого раздельно питаемого золотника 21 соединены с гидродвигателем рукояти 50.
Полости управления золотников 16 и 18 оснащены пружинами с увеличенным усилием поджатия по сравнению с пружинами всех остальных золотников распределителей 5 и 6. Управление золотниками 15,19-21
осуществляется посредством рабочих линий 51-58 от командоаппаратоа 59 и 60. К нижней полости управления золотника 16 подведена линия 61 управления от среднего отвода клапана ИЛИ 62, входы которого соединены с рабочими линиями 53 и 54 управления золотником 21 гидродвигателя 50 рукояти. К верхней полости управления золотника 16 подходит линия 63 от двухпози- ционного распределителя 64, другой подвод
которого соединен с рабочей линией 55 управления золотником 19 гидродвигателя 36 стрелы. Линия 65 управления распределителем 64 соединена с линией 61. Рабочие линии 51 и 52 управления золотником 15
гидромотора 32 поворота платформы соединены с клапанами 66 и 67 управляемой настройки. К полостям управления золотника 18 гидродвигателя 41 ковша подходят линии 68 и 69, которые соединены соответственно
с рабочими линиями 57 и 58 управления золотником 20 гидродвигателя 41 ковша/
На фиг. 2 рукоятки 70 командоаппара- тов снабжены упорами 71, с помощью кото- рых ограничивается наклон рукояток при совмещенном включении, когда нажимаются два соседних толкателя 72 ре гулировочных пружин редукционных клапанов коман- доаппаратов.
Гидропривод работает следующим образом.
В нейтральном положении рукояток ко- мандоалпаратов 59 и 60 сервоуправления рабочие линии 51-58 соединены с баком, соответственно все золотники 14-21 находятся в нейтральном положении. Насосы 1. и 2 подают рабочую жидкость из бака 7 по напорным линиям 3 и 4 к гидрораспределй- телями 5 и 6, напорные линии 10,12 и линии 11 и 13 питания которых заперты. Поэтому рабочая жидкость по проточным каналам 8 и 9 через дроссели 24 и 25 поступает в сливные линии 22 и 23 и далее в бак. Давление в проточных каналах 8 и 9, поддерживаемое дросселями 24 и 25, поступает по линиям 26 и 27 к регуляторам насосов 1 и 2, устанавливая их в положение минимального рабочего объема.
При наклоне машинистом рукоятки командоаппарата, например 59, в каком-либо направлении несовмещенного включения, например на подворот ковша (КЛ), редуцированное, т.е. пропорциональное наклону рукоятки давление передается по рабочей линии 57 к полостям управления золотников 18 и 20. При этом по мере перемещения рукоятки и возрастания давления включается сперва золотник 20, отсекая проход pa-v бочей жидкости по проточному каналу 8 и открывая ей проход по линии 11. Перепад давления на дросселе 24 уменьшается до давления, в сливной линии, что по линии 26 передается на регулятор насоса 1, рабочий объем, а значит и подаваемый насосом поток увеличиваются до максимума. Таким образом, к гидроцилиндру 41 ковша попадает управляемый до максимального поток насоса 1. При дальнейшем перемещении рукоятки командоаппарата 59 под действием увеличивающегося в рабочей линии 57 давления включается золотник 18 и подает к гидроцилиндру 41 ковша также поток насоса 2.
Аналогично происходит управления несовмещенными движениями отворота ковша, подворота и отворота- рукояти и подъема стрелы. При управлении несовмещенными движениями опускания стрелы или поворота платформы задействуется только один золотник и соответственно -один поток. При совмещенном управлении от одной рукоятки благодаря установке упора сжатие пружин редукционных клапанов ограничивается, чем ограничивается и давление в рабочих линиях и исключается возможность включения золотников с пружинами увеличенного усилия поджатия,
т.е. невозможно одновременное включение золотников параллельного питания одного гидрораспределителя 16 для питания рукоятки и 15 для питания гидродвигателя 32 поворота платформы в гидрораспределителе 5, а также 18 для питания гидродвигателя 41 ковша и 19 для питания гидродвигателя 36 стрелы в гидрораспределителе 6. Совмещение же движения стрелы и рукояти или поворота платформы и ковша реализуется за счет включения золотников разных распределителей вместе с золотниками 20 или 21 раздельного питания одного гидрорасп- ределмтеля и золотников 18 или 16 другом распределителе. При этом управление осуществляется двумя несовмещенными движениями обоих командоаппаратов. т.е. возможно получение полного давления в рабочих линиях. Например, для совмещения поворота платформы влево и отворота ковша машинист включает до упора влево рукоятку командоаппарата 59 и влево рукоятку командоаппарата 60. Включаются золотники 15, 18 и 20. При этом питание гидродвигателя 32 осуществляется только от насоса 1, а питание гидродвигателя 41 - только от насоса 2, так как рабочая жидкость не поступает в линию 11 питания золотника 20 ввиду
перекрытия проточного канала 8 золотником 15.
Исключение составляет разрешенное параллельное питание гидродвигателя 32
поворота платформы и гидродаигателя 36
стрелы при подъеме, когда движение назад рукоятки командоаппарата 59 и движением вправо-влево рукоятки командоаппарата 60 включаются золотники 15, 16 и 19. В этом случае давление в рабочих отводах 30 или 31
питания гидродвигателя 32 определяется нагрузкой в гидродвигателе 36, происходит бездроссельный разгон поворотной платформы при ускоренном подъеме стрелы, что сокращает продолжительность цикла и
энергозатраты. Плавность торможения при этом обеспечивается применением предохранительных клапанов 66 и 67 с управляемой настройкой, линии управления настройкой которых соединены с соответствующими рабочими линиями 51 и 52 управления золотником 15.
Формула изобретения Гидравлическая система экскаватора. содержащая два насоса, каждый из которых подключен к своему гидроупраеляемому че- тырехзолотниковому распределителю с проточным каналом, которые соединены соответственно с гидродвигателями поворота платформы и ковша, стрелы и рукоятки, каждый распределитель выполнен с ляраллельным питанием трех подпружиненных гидро- управляемых золотников и раздельным питанием четвертого подпружиненного гидроуправляемрго золотника, гидролинии управления золотников соединены с двумя командоаппаратами, имеющими рукоятки управления, двухпозиционный гидроуправ- ляемый распределитель, установленный между гидролиниями управления золотников гидродвигателя стрелы, клапан ИЛИ выход которого связан с гидролинией управления двухпозиционного распределителя, а входы - с гидролиниями управления четвертого золотника второго распределителя, рабочие линии одного из параллельно питаемых золотников первого распределителя соединены с гидродвигателем поворота платформы, одна из рабочих линий другого параллельно питаемого золотника соединена с полостью подъема гидродвигателя стрелы, рабочие линии одного из параллельно питаемых золотников второго распределителя соединены с гидродвигателем ковша, одна из рабочих линий другого па
раллельно питаемого золотника этого же распределителя соединена .с полостью подъема гидродвигателя стрелы, рабочие линии четвертого золотника соединены с гидродвигателем рукояти, отличающаяся тем, что, с целью повышения надежности в работе, золотник первого распределителя, соединенный с гидродвигателем стрелы, и золотник второго распределителя, соединенный с гидродвигателем ковша, снабжены пружинами большего усилия, чем пружины остальных золотников распределителей, вторая рабочая линия первого упомянутого золотника подключена к линии питания четвертого золотника второго распределителя, рабочие линии четвертого золотника первого распределителя подключены к гидродвигателю ковша, вторая рабочая линия золотника гидродвигателя стрелы второго распределителя подключена к полости опускания гидродвигателя стрелы, а командоаппараты снабжены ограничителями максимального угла наклона рукояток.
| Двухпоточный гидравлический привод рабочего оборудования одноковшового экскаватора | 1982 |
|
SU1020528A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
