Изобретение относится к области автоматического регулирования и может быть использовано для управления объектами широкого профиля.
Цель изобретения - упрощение системы.
На фиг. 1 представлена структурная схема релейной следящей системы; на фиг. 2 - выходные сигналы блоков, иллюстрирующие алгоритм управления.
Релейная следящая система содержит измеритель 1 рассогласования, первый вы- прямитель 2, первый сумматор 3, силовое однополярное реле 4, блок 5 умножения, двигатель 6, редуктор 7, второй выпрямитель 8, первое инерционное звено 9, дву- полярное реле 10, второй сумматор 11, второе инерционное звено 12.
Система работает следующим образом.
В начальный момент при подаче на вход системы сигнала в виде скачка 6,- одно- полярное реле 4 включается и двигатель начинает разгоняться в направлении, опре- деляемом двуполярным реле 10, по знаку сигнала Uj на выходе второго сумм атора 11, который, в свою очередь, определяется знаком сигнала рассогласования Ue на выходе измерителя 1 рассогласования (момент времени О-ti, фиг. 2). Первое не- реключение управляющего сигнала (изменение знака на противоположный) на выходе двуполярного реле 10 и соответственно блока 5 умножения происходит в момент, когда напряжение Ui на выходе второго инерционного звена 12 (ti, фиг. 2) сравняет- ся с напряжением сигнала рассогласования. Этот момент задается параметрами апериодического звена, имеющего передаточную
функцию W(S) .
Ij S 1
Под действием полученного сигнала двигатель реверсируется (Ua., на фиг. 2). Переход в режим динамического торможения происходит когда напряжение lUal на выходе второго выпрямителя превысит U, т.е. lUj lUel . В этом случае напряжение Ц на выходе первого сумматора 3 становится отрицательным и выходной сигнал силового однополярного реле 4 равен нулю (t2 - 1з,
фиг. 2). Момент перехода двигателя в режим динамического торможения определяется выбором параметров первого инерционного звена 9, имеющего передаточную
Ki
функцию W(S) ц j I
Задача синтеза корректирующего устройства сводится к определению параметров инерционных звеньев и рещается, исходя из соображений получения максимально возможного быстродействия в системе.
Таким образом, в предлагаемой системе, как и в известной системе, реализуется переходный процесс без перерегулирования при условии существенного упрощения управляющей части.
0 5
5
0
Формула изобретения
Релейная следящая система с нелинейной коррекцией, содержащая последовательно соединенные измеритель рассогласования и первый выпрямитель, последовательно соединенные первый сумматор и силовое однополярное реле, последовательно соединенные блок умножения, двигатель и редуктор, выход которого связан с входом измерителя рассогласования, выходы первого выпрямителя и силового однополярного реле подключены к первым входам соот- Е етственно первого сумматора и блока умножения, последовательно соединенные второй сумматор и двуполярное реле, выход которого подключен к второму входу блока умножения, выход второго выпрямителя соединен с вторым входом первого сумматора, выход измерителя рассогласования соединен с первым входом второго сумматора, отличающаяся тем, что, с целью упрощения системы, она содержит первое и второе инерционные звенья, на входы которых подключены выход измерителя рассогласования, выход первого инерционного звена подключен к входу второго выпрямителя, а выход второго инерционного звена - к второму входу второго сумматора.
Qi
во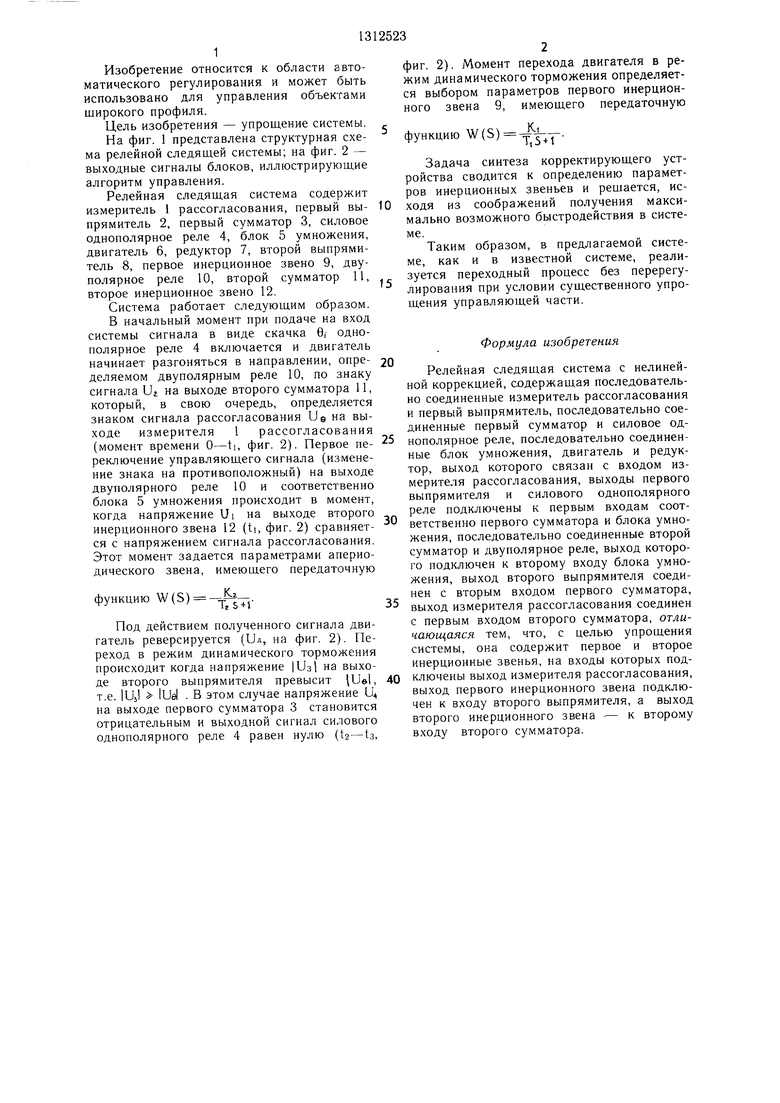
| название | год | авторы | номер документа |
|---|---|---|---|
| Релейная следящая система с нелинейной коррекцией | 1984 |
|
SU1223205A1 |
| Следящая система | 1981 |
|
SU968783A2 |
| Релейная следящая система | 1986 |
|
SU1399696A1 |
| Бесконтактная следящая система постоянного тока | 1979 |
|
SU930238A2 |
| Бесконтактный следящий привод постоянного тока | 1975 |
|
SU930241A1 |
| Следящая система | 1979 |
|
SU788076A1 |
| Следящая система | 1975 |
|
SU608119A1 |
| Бесконтактная следящая система постоянного тока | 1974 |
|
SU474787A1 |
| Бесконтактная следящая система постоянного тока | 1974 |
|
SU525921A1 |
| Бесконтактный следящий привод постоян-НОгО TOKA | 1979 |
|
SU853606A1 |
Изобретение относится к автоматическому регулированию и может быть использовано для улучшения энергетических показателей релейных систем с электродвигателями. Целью изобретения является упрощение релейной следящей системы с нелинейной коррекцией. Указанная цель достигается тем, что релейная следящая система, содержащая последовательно соединенные измеритель рассогласования, первый выпрямитель, первый сумматор, силовое однополярное реле, блок умножения, двигатель и редуктор, выход которого связан с измерителем рассогласования, и также последовательно соединенные второй сумматор и двуполярное реле, выход которого подключен к второму входу умножения, и второй выпрямитель, выход которого соединен с вторым входом первого сумматора, выход измерителя рассогласования соединен с первым входом второго сумматора, дополнительно содержит первое и второе инерционные звенья, на входы которых подключен выход измерителя рассогласования, а выход первого инерционного звена соединен с входом второго выпрямителя, второго - с вторым входом второго сумматора. 2 ил. i (Л оо ГчЭ СП го со
-U,
ii 2
| Цыпкин Я | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Релейные автоматические системы | |||
| Наука, 1974, с | |||
| Скоропечатный станок для печатания со стеклянных пластинок | 1922 |
|
SU35A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Хлыпало Е | |||
| И | |||
| Нелинейные корректирующие устройства в автоматических системах | |||
| Энергия, 1973, 179, рис | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Релейная следящая система с нелинейной коррекцией | 1984 |
|
SU1223205A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
