Изобретение относится к теплоэнергетике и может быть использовано в системах гидростатического подъема ротора в сегментных подшипниках скольжения, преимущественно мсяцных паровых турбин.
Наиболее близкой по технической сущности и достигаемому результату к предлагаемой является система двтоматйческого управления ги.дростатическим подъемом ротора турбомашины, содержащая вентили на линиях подвода масла в камеры гидроподъема каждого несущего сегмента подошпника, пусковые устройства электроприводов этих вентилей и датчики температуры каждого из сегментов, температуры вала и температуры масла l.
Недостатком известной системы является пониженная надёжность, из-за использования на калсдом сегменте подшипника датчика перемещения со сложной измерительной аппаратурой.
Цель изобретения - повышение надежности.
Для достижения поставленной цели в систему введены по числу несуицих сегментовблоки сравнения, блоки автоматического утгравления,блоки задержки, коммутаторы и ограничители хода, а. датчик температуры каокдого из сегментов подключен к входу cocfr- , ветствующего блока сравнения и к входу соответствующего коммутатора, датчик температуры вала подключен к входам всех коммутаторов, а датчик те1тературы масла - к входам всех блоков сравнения, выход каждого из которых через соответствующие блок
10 автоматического управления и ограничитель хода подключен к входу пускового устройства электропривода соответствующего вентиля, причем выход каждого коммутатора подключен к вхо15дам соответствующих блока автоматического управления и ограничителя хода, а выход каждого их ограничителей хода подключен также через блок задержки к входам блока автомати20ческого управления и пускового устройства для другого несущего сегмента.
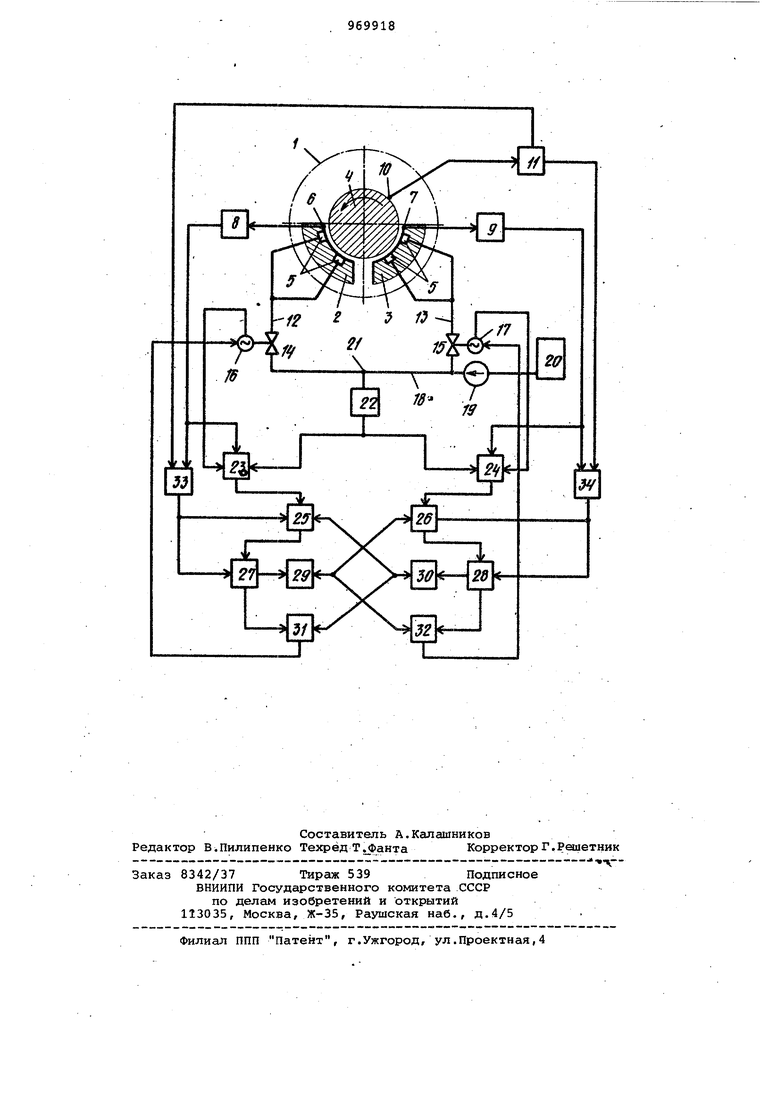
На чертеже представлена схема системл автоматического управления гидростатическим подъемом ротора турбо25машины.
Во вкладыше 1 подшипника расположены самоустанавливающиеся несущие сегменты 2 и 3 подшипника, охватывающие шейку 4 вала. На поверхности
3d трения сегментов расположены камеры
5 гидроподъема. В теле сегментов установлены датчики б и 7 температуры сегментов, которые соединены с усилителями 8 и 9 сигналов,, а с поверхностью шейки вала контактирует датчик 10 температуры вала, соединенный с усилителем 11 сигнала. Камеры 5 гидроподъема через линии 12 и 13 подвода масла соединены с вентилями 14 и 15, степень открытия которых регул руется электроприводами 16 и 17. Линии 12 и 13 после вентиле 14 и 15 подключены параллельно к маслопроводу 18, который через маслоtiacoc 19 соединен с маслобаком 20. В маслопроводе 18 после насоса 19 установлен датчик 21 температуры масла, который соединен с усилителем 22 сигнала и выполняет функцию задатчика. Выход усилителя 22 соединен с первым входом блоков 23 и 24 сравнения сигналов, каждый из которых относится к соответствующему сегменту 2 и 3. Выходы блоков 23.и 24 сравнения соединены соответственно с первыми входами блоков 25 и 26 автоматичесйого управления, а выходы последних через первые выходы ограничителей 27 и 28 хода соединены с блоками 29 и 30 задержки, а входы с реверсивными пусковыми устройствами 31 и 32, выхода которых соединены с электроприводами 16 и 17 соответствующих вентилей 14 и 15, Выходы усилителей 8 и 9 соединены с вторыми входами блоков 23 и 24 и пергвымн входами коммутаторов 33 и 34, а выходы.усилителя 11 соединены с вторыми входами коммутаторов 33 и 34,
Система работает следующим обра.зом. .
В нормальном рабочем положении между сегментами 2,3 и шейкой 4 вала существует зазор, через который протекает масло, подаваемое насосом 19 из маслобака.20. в этом положении, как показывают испытания, температура подводимого масла и поверхности трения сегментов 2 и 3 од :1наковы,а температура шейки 4 отличается от тег-тературы масла. Поэтому равность между температурами масла и сегментов 2 и 3 равна нулю, а между температурами масла и шейки 4 не равна нулю. В этом случае выходной сигнал усилителя 11 от датчика 10 поступает на вторые входы коммутаторов 33 и 34 а выходные сигналы усилителей 8 и 9 от датчиков 6 и 7 температуры поступают соответственно, на вторые входы блоков 23 и 24 сравнения и на первые входы коммутаторов 33 и 34. При равной величине сигналов, поступающих на первые и вторые входы коммутаторов 33 и 34, у последних на выходе сигналы будут отсутствовать, а равные сигналы, поступающиена
первые, вторые и третьи входы блоков 23 и 24 сравнения от усилителя 22, соответствующихусилителей 8 и 9 и обратных связей электроприводов 16 и 17 формируют запрет выходных
сигналов блоков 23 и 24 сравнения. В результате такого режима система управления гидростатическим подъемом ротора будет уравновешена, и между сегментами 2,3 и шейкой 4 вала
устанавливается зазор, через который протекает масло, подводимое к камерам 5 гидроподъема насосом 19. Если температура одного из сегментов (например, сегмента 2) увеличится на величинуAt от заданной температуры масла, то на второй вход блока 23 сравнения через усилитель 8 поступает сигнал приращения от датчика б температуры. В результате
рассогласованности сигналов, поступающих от датчи,{а б (температуры сегмента 2) и д.:гтчика 21 (температу зы масла), блок 23 сравнения формирует и выдает сигнал с выхода на
первый вход блока 25 автоматического
управления. Последний формирует и выдает сигнал ка первый вход ограничителя 27 хода. Если вентиль 14 открыт не полностью, то выходной сигнал с первого выхода ограничителя 27 поступает на первый вход реверсивного пускового устройства 31.-, При этом сигнал с второго выхода ограничителя 27 на блок -29 задержки поступает толь;:.о при полном открытии 1зентиля 14.
При поступлении сигнала на первый зход устройства 31 последнее своим выходным сигналом включает электропривод 16 на открытие вентиля 14, тем самым будет увеличиваться подача масла в камеры 5 гидроподъема сегмента 2. Вследствие этого сегмент 2 начнет отходить от шейки 4 вала, увеличивая смазочный зазор, а его
температура начнет уменьшаться. При процессе открытия вентиля 14 через обратную связь привода 16 поступает сигнал на третий вход блока 23 сравнения. Как только .сигнал на третьем входе блока 23 сравняется с величиной сигнала прираицения импульс с
выхода блока .23 снижается,и электропривод 16 отключается.
Если в дальнейшее увеличение температуры сегмента 2 прекратится, то
на этом процесс управления гидростатическим подъемом ротора в подшипнике за счет увеличения подачи масла в камеры гидроподъема также прекратится.;
Если же температура сегмента 2 будет расти, то процесс открытия вентиля 14 будет продолжаться вплоть до полного открытия. При полностью открытом вентиле 14 ограничитель 27 хода снимает сигнал на
первом выходе с реверсивно1о устройства 31 и выдает сигнал со своего второго выхода на блок 29 задержки. По истечении задержки времени, если приращение температуры сегмента не прекратится, с выхода блока 29 задержки поступает сигнал на третий вход блока 26 автоматического управления и последний отключится. Одновременно сигнал с выхода блока 29 задержки поступает на второй вход реверсивного пускового устройства 32. Последний срабатывает и включает электропривод 17 на закрытие вентиля 15 сегмента 3 подшипника 1. В результате уменьшения проходного сечения вентиля 15 произойдет перераспределение потоков масла между сегментами 2 и 3, что приведет к вырав.ниванию температур сегмента 2 и подводимого масла. Как только температура последних сравняется, процесс регулирования в системе гидростатического подъема ротора прекратится.
Если же в режиме гидростатического подъема ротора температура сегмента 3 не будет равна температуре масла, то процесс автоматического управления подачи масла в Кс1Меры гидроподъема будет осуществляться аналогично вышеописанному элементами, 24,26,28, 30 и 32. Возможен второй случай нарушени5Г нормальной работы системы. Из-за перераспределения нагрузок один из . сегментов, например сегмент 2, оказывается прижатым к шейке 4 вала. В этом случае его тейЪература станет равной температуре вала. Тогя,а с выходов усилителей 8 и 11 от датчиков 6 и 10 температур подаются равные по величине сигнгшы на первый и второй входы коммутатора 33. Последний формирует и выдает сигнеш на вторые входы блока 25 автоматического управления и ограничителя 27 хода. В этом случае блок 25 автоматического управления будет заперт на период присутствия сигнала на его втором входе. В результате получения сигнала с коммутатора 33 ограничитель 27 хода формирует и выдает сигнал на реверсивное пусковое устройство 31,которое включает электропривод 16 до псхлного открытия вентиля 14.
В результате увеличения подачи масла к камерам гидроподъема и установления зазора между поверхностями трения: температуры сегмента 2 и шейки 4 начнут отличаться друг от друга. Из-за рассогласования сигналов на входе коммутатора 33 последний снимает выходной сигнал с блока 25 автоматического управления и ограничителя 27 хода.
Дальнейшее поддержание заданной температуры во всех точках будет осуществляться блоками 23 и 24 от усилителя 22.
Предлагаемая система позволяет отказаться от установки на подшипниках турбомашины дополнительных датч-.:коп перемещения с собственной системой измерения, а также исключает износ поверхности трения сегментов. Тем caNHM повышается надежность.
Формула изобретения
5 Система автоматического управления гидростатическим подъемом рото.ра турбомашины, содержащая вентили .на линиях подвода масла в камеры гидроподъема каждого несущего сегмента подшипника, пусковые устройства электроприводов этих вентилей и датчики температуры каждого из сегментов, температуры зала и температуры масла, отличаю25 Щ а. я с я тем, что, с целью повы- шения надежности, в нее введены по числу несущих сегментов блоки сравнения, блоки автоматического управления, блоки задержки, коммутаторы и ограничители хода, а датчик тем30пературы каждого из сегментов подключен к входу соответствующего блока сравнения и к входу соответствуй щего коммутатора, датчик температуры вала подключен к входам всех . мутаторов, а датчик температуры масла - к входам всех блоков сравнения, выход каждого из которых через соответствующие блок автоматического управления и ограничитель хода под40 ключей к входу пускового устройства электропривода соответствующего вень тиля, причем выход каждого колшутатора подключен к входам соответствующих блока автоматического управле45 НИН и ограничителя хода, а выход каждого из ограничителей подключен также через блок задержки к входам блока автоматического управления и пускового устройства для другого несущего сегмента;
Источники информации, принятые во внимание при экспертизе
1. Коваль Г.С. и др. Испытания и опыт эксплуатации радиальных сегментных подшипников и системы гидроподъема роторов К-500-240-2 ХТГЗ. В кн. Котельные и турбинные установки энергоблоков мощностью 500800 МВТ. Под ред. Дорощука В.Е, и Руеина В.Б. М., Энергия, 1979, с.371-380.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля работы подшипника | 1985 |
|
SU1278507A1 |
| Способ контроля соответствия заданным параметрам устройства гидравлического подъема ротора паровой турбины | 1989 |
|
SU1627740A1 |
| ПОДВОДНЫЙ ЗОНД | 2008 |
|
RU2370787C1 |
| ПОДВОДНЫЙ ЗОНД | 2008 |
|
RU2365940C1 |
| Установка для механических испытаний образцов при нагреве | 1984 |
|
SU1264043A1 |
| Электропривод переменного тока | 1984 |
|
SU1164853A1 |
| Частотно-регулируемый электропривод с экскаваторной характеристикой | 1979 |
|
SU904176A2 |
| Способ импульсного управления асинхронным электродвигателем с вентиляторной нагрузкой и устройство для его осуществления | 1987 |
|
SU1539949A1 |
| Система автоматического управления процессом прессования торфобрикетов | 1989 |
|
SU1691138A1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ СИСТЕМЫ УПРАВЛЕНИЯ | 2015 |
|
RU2601368C1 |