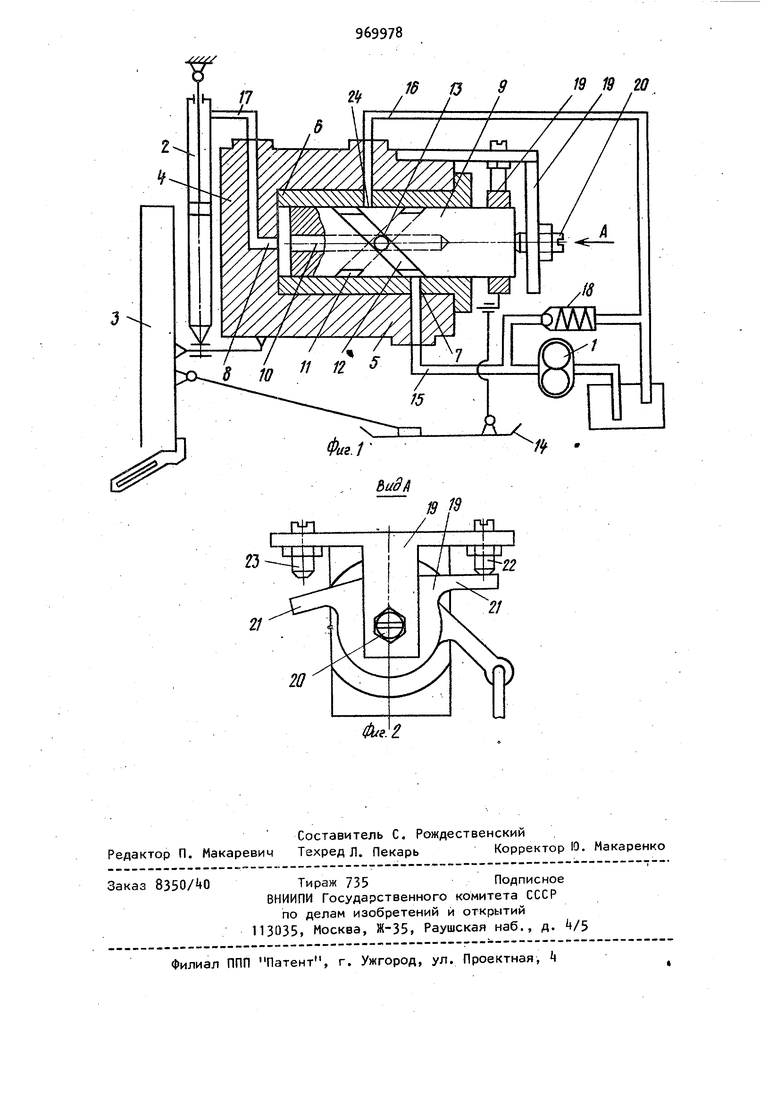
Изобретение предназначено для гид равлического привода следящих систем автоматического управления и может быть использовано в гидроследящем приводе управления рабочими органами мобильных машин, например, чаесбороч ной машины. Известен гидравлический следящий привод, содержащий гидронасос, силовой цилиндр, жестко связанный с рабо чим органом, распределитель поворотного типа, состоящий из установленной в корпусе втулки с окнами подвода и отвода рабочего тела и поворотной пробки с каналами, соединенными постояннб с силовым цилиндром периодически с упомянутыми окнами, платформу-датчик обратной связи, кинематически соединенную с рабочим органо и распределителем, и рабочие трубопроводы 1 . Недостатком этого гидроследящего привода является то, что прямые кром ки выступов пробки комплектующих их распределителей поворотного типа не обеспечивают необходимой при требуемом быстродействии устойчивой работы гидроследящей системы, плавности изменения расхода поступающей в силовые цилиндры рабочей жидкости при переходных режимах работы системы. Цель изобретения - расширение функциональных возможностей. Указанная цель достигается тем, что поворотная пробка распределителя снабжена механизмом ее регулирования по углу поворота и в осевом направлении, а ее каналы, соединяемые периодически с окнами втулки, выполнены в виде спиральных канавок на ее поверхности, связанных между собой и с каналом, постоянно соединенным с силовым цилиндром радиальным сверлением. Кроме того, механизм регулирования пробки в осевом направлении выполнен в виде упиракзщегося в наружный торец пробки регулируемого винта, установленного на корпусе распределителя. Кроме того, механизм регулирования пробки по углу поворота выполне в виде уступов на ней и взаимодействующих с последними упорных винтов, установленных на корпусе распределителя , На фиг. 1 изображена конструктивная схема привода; на фиг. 2 по стрелке А на фиг. 1. Гидравлический следящий привод содержит гидронасос 1, силовой цилиндр 2, жестко связанный с рабочим органом 3, распределитель k поворотного типа, состоящий из корпуса 5i втулки 6 с окнами подвода 7 и отвода 8рабочего тела и поворотной пробки 9с каналом 10, постоянно соединенны с силовым цилиндром, и канавки 11 и 12, периодически соединяемые с окнами 7 и 8, выполненные в виде спиральных канавок на поверхности пробки, связанных между собой и каналом 10радиальным сверлением 13. Кроме того, привод содержит платформу-датчик k обратной связи, кине матически соединенную с рабочим органом 3 и распределителем k и рабочие трубопроводы 15-17, причем в трубопроводе 15 установлен предохранительный клапан 18. Распределитель k снабжен механизмом 19 регулирования поворотной пробки по углу поворо та и в осевом направлении, причем он состоит из упирающегося в наружный торец пробки 9 регулировочного винта 20 и выполненных на пробке уступов 21, взаимодействующих с упорными винтами 22 и 23. Гидравлический следящий привод работает следующим образом. Нагнетаемая насосом 1 рабочая жид кость по напорному трубопроводу 15 подается к подводящему окну 7 распределителя k. Пробка 9 через кинематическую связь взаимодействует с платформой-датчиком Ij. При подаче сигнала на подъем управляемого объек та, пробка 9 поворачиваясь, сообщает спиральную канавку 12 с подводящим окном 7 распределителя k. В то же время кромки спиральных канавок перекрывают окно 2k. При этом рабочая жидкость по спиральной канавке 12, радиальному сверлению 13 и осевому каналу 10 через окно 8 и трубопровод 17 начнет поступать в рабочую полость силового цилиндра 2, осу ви ществляя тем самым подъем рабочего органа 3. При подаче сигнала на опускание повернувшаяся, пробка 9 сообщит спиральную канавку 12 с окном 2 распределителя 4 и кромками этой канавки перекроет подводящее окно 7. Рабочая жидкость под действием силы тяжести рабочего органа 3 начнет переливаться из силового цилиндра 2 по трубопроводу 17 через окно 8, осевой канал 10, радиальное сверление 13, спиральную канавку 12 и , по сливному трубопроводу 16 в бак, осуществляя тем самым опускание рабочего органа 3При нейтральном положений пробки 9 распределителя k кромки спиральных канавок 11 и 12 часточно перекрывают окна 7 и 24 распределителя таким образом, что перепад давлений между подводящим 7 и отводящим 2k окнами корпуса распределителя 4 обеспечивает удержание рабочего органа 3 в неподвижном положении. Соответствующим выбором угла наклона спиральных канавок пробки 9 и взаиморасположения подводящего 7 и отводящего 8 окон корпуса 5 распределителя k обеспечивается требуемая плавность изменения расхода по ступающей в силовой цилиндр 2 рабочей жидкости при переходных режимах работы следящей системы. Распределитель k гидроследящего привода обеспечивает возможность регулирования скорости подъема рабочего органа 3. Изменение скорости подъема осуществляется регулировочным винтом 22, ограничивающим угол поворота пробки 9 в сторону подъема и тем самым регулирующим величину перекрытия подводящего оКна 7 к ромкой спиральной канавки 12 в режиме подъема рафчего органа 3Для обеспечения качественного выполнения технологического процесса в условиях контактирования задающего устройства следящей системы с поверхностью, имеющей периодически изменяющиеся физико-механические свойства, например, при работе гидроследящей системы чаесборочной машины, в предлагаемом распределителе предусмотрена возможность регулировки его чувствительности. Изменение чувствительности распределителя k осуществляется винтом 20, регулирующим положение пробки 9 в осевом
направлении относительно корпуса распределителя и тем самым положение спиральных канавок 11 и 12 относительно подводящего 7 и отводящего 8 окон и при осевом перемещении Пробки 9 в сторону уменьшения расстояния окна 2 между спиральными канавками 11 и 12 и окнами 7, 8, 2k распределителя Ц при нейтральном положении пробки, чувствительность распределителя k повышается, при увеличении расстояния - чувствительность уменьшается.
Распределитель t гидроследящего привода обеспечивает возможность автоматического подъема или остановки рабочего органа 3 при отрыве платформы-датчика Н обратной связи следящей системы от контактирующей с ней- поверхности (например, при пёреездах чаесборочной машины через поврежденные или изреженные участки плантаций). Осуществляется это следующим образом. При дальнейшем проворачивании пробки 9 в сторону сигнала CnycKaHtte, кромки спиральной канавки 11, сообщавшейся с окном 2k распределителя Ц, перекроют это окно, а вторая спиральная канавка 12 начнет сообщаться с подводящим окном 7 распределителя k. Рабочая жидкость, поступая через подводящее окно 7 и сообщенную с ним спиральную канавку 12 в силовой цилиндр 2, осуществляет подъем рабочего органа 3. Скорость подъема рабочего органа 3, зависящая от величины перекрытия окна 7 кромками спиральных канавок 11 и 12 пробки 9, регулируете винтом 23, чем и обеспечивается возможность как фиксации положения рабочего органа 3, так и подъем его с требуемой скоростью.
Таким образом, в предлагаемом гидравлическом следящем приводе обеспечивается достижение положительного эффекта, состоящего в улучшении технико-эксплуатационных и технологических показателей работы путем повышения устойчивости работы гидроследящей системы, обеспечения возможности регулирования ее чувствительности и осуществления автоматического подъёма управляемого объекта при отрыве задающего устройства от обрабатываемой поверхности.
Формула изобретения ,
1.Гидравлический следящий привод содержащий гидронасос, силовой цилиндр, жестко связанный с рабочим органом, распределитель поворотного типа, состоящий из установленной в корпусе втулки с окнами подвода и отвода рабочего тела и поворотной пробки с каналами, соединенными постоянно
с силовым цилиндром и периодически с указанными окнами, платформу-датчик обратной связи, кинематически соединенную с рабочим органом и распределителем, и рабочие трубопроводы, отличающи и ся тем, что, с целью расширения функциональных возможностей, поворотная пробка распределителя снабжена механизмом ее регулирования по углу поворота и в осевом направлении, а ее каналы, соединяемые периодически с окнами втулки, выполнены в виде спиральных канавок на ее поверхности, связанных между собой и с каналом, постоянно соединенным с силовым цилиндром радиальным сверлением.
2.Привод по п. 1, о т ли чающ и и с я тем, что механизм регулирования пробки в осевом направлении выполнен в виде упирающегося в наружный торец пробки peгyлиpoвoч loгo винта , установленного на корпусе распределителя.
3.Привод по п. 1, о т л и чающийся тем, что механизм регулирования проб«и по углу поворота выполнен в виде уступов на ней и взаимодействующих с последними упорных винтов, установленных на корпусе распределителя.
Источники информации, принятые во внимание при экспертизе
1. Башта Т.М. Гидравлические следящие приводы. М., Машгиз, I960, с. 30.
Ю 19 20 / / I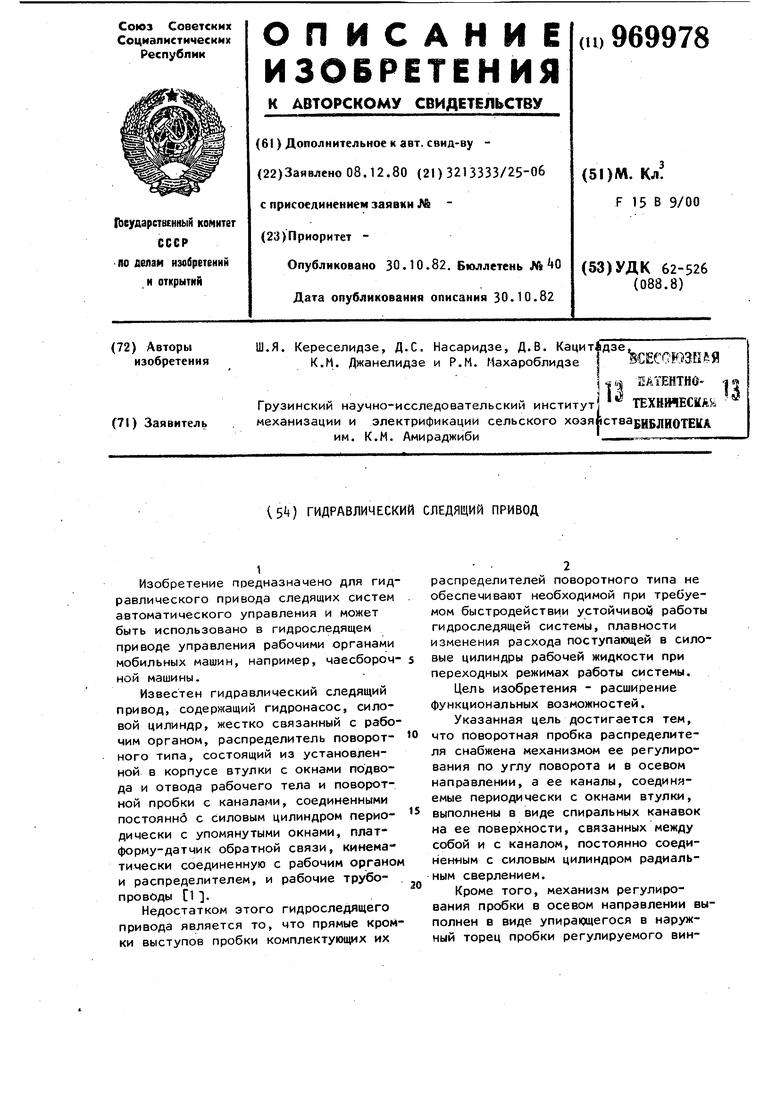

| название | год | авторы | номер документа |
|---|---|---|---|
| Гидроследящая система чаесборочной машины | 1978 |
|
SU923433A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ АГРЕГАТ, СЛЕДЯЩИЙ ДВУХКАСКАДНЫЙ ГИДРОУСИЛИТЕЛЬ И РЕГУЛИРУЕМЫЙ СИЛОВОЙ ДРОССЕЛЬ | 2002 |
|
RU2242641C2 |
| Устройство для обработки резьбовых отверстий | 1985 |
|
SU1303302A1 |
| РОТОРНО-ПЛАСТИНЧАТАЯ МАШИНА С ОБЪЕМНЫМ РЕГУЛИРОВАНИЕМ (варианты) | 2017 |
|
RU2643886C1 |
| Механизм навески чаесборочного аппарата со следящей системой | 1979 |
|
SU898993A1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ КЛАПАНАМИ ГАЗОРАСПРЕДЕЛЕНИЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 1999 |
|
RU2163299C2 |
| РЕЗЕРВИРОВАННЫЙ СЛЕДЯЩИЙ ГИДРОМЕХАНИЧЕСКИЙ ПРИВОД ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2004 |
|
RU2266234C1 |
| ГИДРОМЕХАНИЧЕСКОЕ СЛЕДЯЩЕЕ УСТРОЙСТВО СЕЛЬСКОХОЗЯЙСТВЕННОЙ МАШИНЫ | 2007 |
|
RU2372216C2 |
| Дозатор-распределитель топлива высокого давления | 1987 |
|
SU1559217A1 |
| Устройство для очистки внутренней поверхности трубопровода | 1986 |
|
SU1319944A1 |