(Sl) ГИДРОСЛЕДЯЩАЯ СИСТЕМА ЧАЕСБОРОЧНОЙ МАШИНЫ
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм навески чаесборочного аппарата со следящей системой | 1979 |
|
SU898993A1 |
| Гидравлический следящий привод | 1980 |
|
SU969978A1 |
| Гидроследящая система чаесборочного аппарата | 1986 |
|
SU1313384A1 |
| Механизм навески чаесборочного аппарата со следящей системой | 1991 |
|
SU1819120A3 |
| Механизм навески чаесборочного аппарата со следящей системой | 1989 |
|
SU1773328A1 |
| Хлопкоуборочная машина | 1986 |
|
SU1344279A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО КОПИРОВАНИЯ РЕЛЬЕФА ГРЯДКИ РАБОЧИМИ АППАРАТАМИ | 1972 |
|
SU352617A1 |
| Устройство для управления силовыми гидроцилиндрами грузоподъемных машин | 1973 |
|
SU450770A1 |
| Устройство для автоматического управления чаесборочной машиной | 1990 |
|
SU1753969A2 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО КОПИРОВАНИЯ РЕЛЬЕФА ГРЯДКИ РАБОЧИМИ АППАРАТАМИ | 1971 |
|
SU307764A1 |
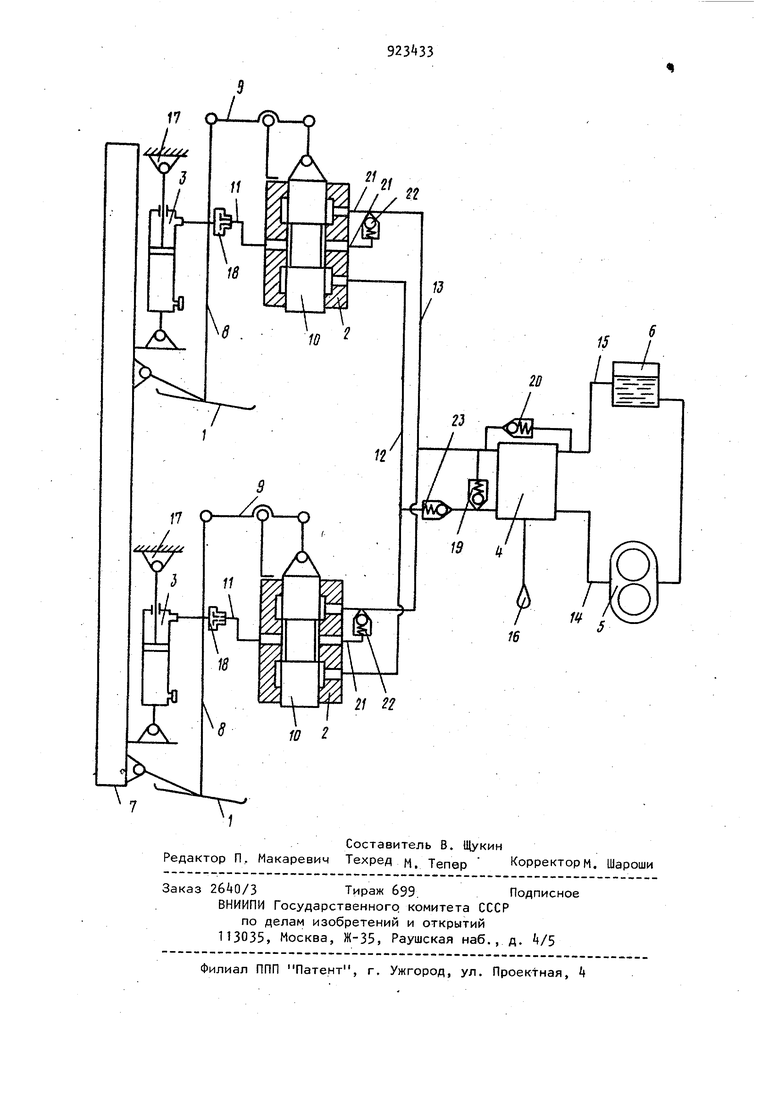
Изобретение относится к автоматиза ции технологических процессов сельско хозяйственных машин. Известна следящая система, содержа щая платформы-датчики, струйные распределители и силовые цилиндры, управляющие чаесборочным аппаратом 1. Недостатком известной следящей системы является то, что оно не обеспечивает, в независимости от положения платформ-датчиков, подъема чаесборочного аппарата во время выполнения технологического процесса, необходимо го при переездах через изреженные участки чайных плантаций и обработке некачественно подрезанной поверхноссти чайных кустов. ,Наиболее близкой по технической сущности к предлагаемой является гидроследящая система чаесборочной машины, включающая копирующие платформы, связанные шарнирно-рычажной передачей с золотниковыми распределителями автоматического управления, напорные и сливные магистрали, командный распределитель, гидронасос и бак 2 . Недостатком этой гидроследящей системы является невозможность,подъема рабочих органов чаесборочной машины в режиме его ручного управления. Цель изобретения - обеспечение подъема рабочего органа чаесборочной машины в режиме его ручного управления . Эта цель достигается тем, что гидроследящая система снабжена обратными клапанами, один из которых установлен в трубопроводах, соединяющих сливную магистраль со средним окном каждого золотникового распределителя, а другой - в напорной магистрали. На чертеже показана схема гидроследящей системы чаесборочной машины. Предлагаемая гидррследящая система состоит из копирующих платформ 1, золотниковых распределителей 2 автоматического управления, силовых цилиндров 392 3, командного распределителя k, гидронасоса 5 и бака 6. Копирующие платформы 1, шарнирно подвешенные к чаесборочному аппарату 7 посредством тяги 8 и рычага 9, взаимодействуют с плунжером 10 распределителей 2, соединенных рукавом 11 с рабочей полостью силового цилиндра 3 напорным и сливным трубопроводами 12 и 13 с командным распределителем 4. Командный распределитель 4 посредством нагнетающей и сливной магистралей Ни 15 соединен с гидронасосом 5 и баком 6. Переключением рычага 16 командного распределителя , осуществляется изменение направления потока рабочей жидкости в сливном трубопроводе 13. Штоки силовых цилиндров 3, к кото рым подвешен чаесборочный аппарат 7, шарнирно закреплены к установленным на раме чаесборочным машинам кронштейнам 17. В рукаве 11 силового цилиндра установлен дросселирующий клапан 18 ;одностороннего действия. Напорный и сливной трубопроводы 12 и 13 соеди нены между собой редукционным клапаном 19, а в канале, соединяющем сливной трубопровод 13 со сливной магистралью 15 установлен перепускной клапан 20. Для осуществления подъема чаесборочного аппарата в режиме ручного управления при любом положении, взаимодействующего с платформой 1, плунжера 10 распределителя 2 автоматического управления, в предлагаемой гидроследящей системе предусмотрен канал 21, сообщающий рукав 11 силового цилиндра со сливным трубопроводом 13, в канале 21 расположен обратный клапан 22, а в напорном трубопроводе-12 установлен обратный клапан 23. При работе чаесборочной машины пер ещения скользящих по обрываемой поверхности чайных кустов копирующих платформ 1 передаются плунжеру 10 распределителя 2 автоматического управления. При нахождении рычага 16 командно распределителя k в положении режима автоматического управления рабочая жидкость из нагнетающей магистрали 14 по напорному трубопроводу 12 пода ется распределителем 2 автоматического управления. При подъеме чаесборочного аппарата в режиме автоматического управления 4 плунжер 10 распределителя 2 перекрывает сливной трубопровод 13 и соединяет напорный трубопровод 12 с рукавом 11 силового цилиндра 3, по которому рабочая жидкость, открывая дросселирующий клапан 18 одностороннего действия, свободно поступает в верхнюю полость силового цилиндра 3- При перемещении штока силового цилиндра в крайнее свое положение рабочая жидкость начинает циркулировать через редукционный клапан 19. При опускании чаесборочного аппарата плунжер 10 перекрывает напорный трубопровод 12 и соединяет рукав 11 со сливным трубопроводом 13. Под действием силы тяжести чаесборочного аппарата 7 рабочая жидкость начинает выдавливаться из верхней полости силового цилиндра 3 через калиброванное отверстие дросселирующего клапана 18, который, тем самым, регулирует скорость опускания чаесборочного аппарата 7. Рабочая жидкость по сливному трубопроводу 13 будет поступать в сливную магистраль 15. Для осуществления подъема чаесборочного аппарата 7 в режиме ручного управления рычаг 16 командного распределителя k переводится в положение, при котором рабочая жидкость начинает поступать из нагнетающей магистрали Н в сливной трубопровод 13. Здесь возможны три случая: подъем аппарата необходимо провести, когда платформа 1 находится в крайнем нижнем положении (например, припереводе чаесборочного аппарата в транспортное положение при выезД с чайной шпалеры) . Плунжер 10 распределителя 2 автоматического управления находится при этом в верхнем полЪжении и, Перекрывая напорный трубопровод 12, сообщает сливной трубопровод 13 с рукаеом 11 силового цилиндра 3. Подъем аппарата в этом случае осуществляется рабочей жидкостью, поступающей из трубопровода 13, через рукав 11 в верхнюю полость силового цилиндра 3; подъем аппарата необходимо произвести, когда платформа 1 находится в крайнем верхнем положении (например, в .случае возникновения аварийных ситуаций при выполнении технологического процесса) . Плунжер 10 распределителя 2 автоматического управления, находящийся при этом в нижнем положении, перекрывает сливной 5 трубопровод 13 и сообщает напорный трубопровод 12 с рукавом 11 силового цилиндра. Подъем аппарата осуществляется рабочей жидкостью, поступающей из трубопровода 13, через обратный клапан 22 и рукав 11 в силовой цилиндр 3- Утачка рабочей жид кости по напорному трубопроводу 12 предотвращается обратным клапаном 23; . подъем, аппарата необходимо произ вести при нахождении копирующей пла формы 1 -в среднем положении, при ко тором плунжер 10 распределителя 2 находится в нейтральном положении и одновременно перекрывает напорный и сливной трубопроводы 12 и 13 (например, во время выполнения технологического процесса при переезде участков чайных плантаций). В этом случае подъем аппарата осуществляет ся рабочей жидкостью, поступающей из сливного трубопровода 13, через обратный клапан 22 и рукав 11 в вер нюю полость силового цилиндра 3. Предлаг-аемая гидроследящая систе ма обеспечивает подъем рабочего органа чаесборочной машины в режиме его ручного управления. 3 Формула изобретения Гидроследящая система чаесборочной машины, включающая копирующие платформы, связанные шарнирно-рычажной передачей с золотниковыми распределителями автоматического управления, напорные и сливные магистрали, командный распределитель, гидронасос и бак отличающаяся тем, что, с целью обеспечения подъема рабочего органа чаесборочной машины в режиме его ручного управле- . ния, гдироследящая система снабжена обратными клапанами, один из которых установлен в трубопроводах, соединя- ющих сливную магистраль со средним окном каждого золотникового распределителя, а другой - в напорной магистрали. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 17533, кл. А 01 D 46/ОА, 1965. 2. Кереселидзе Ш.Я. и др. Чаесборочная машина Сакартвело, Тбилиси, Танатлеба, 1968, с. 39
