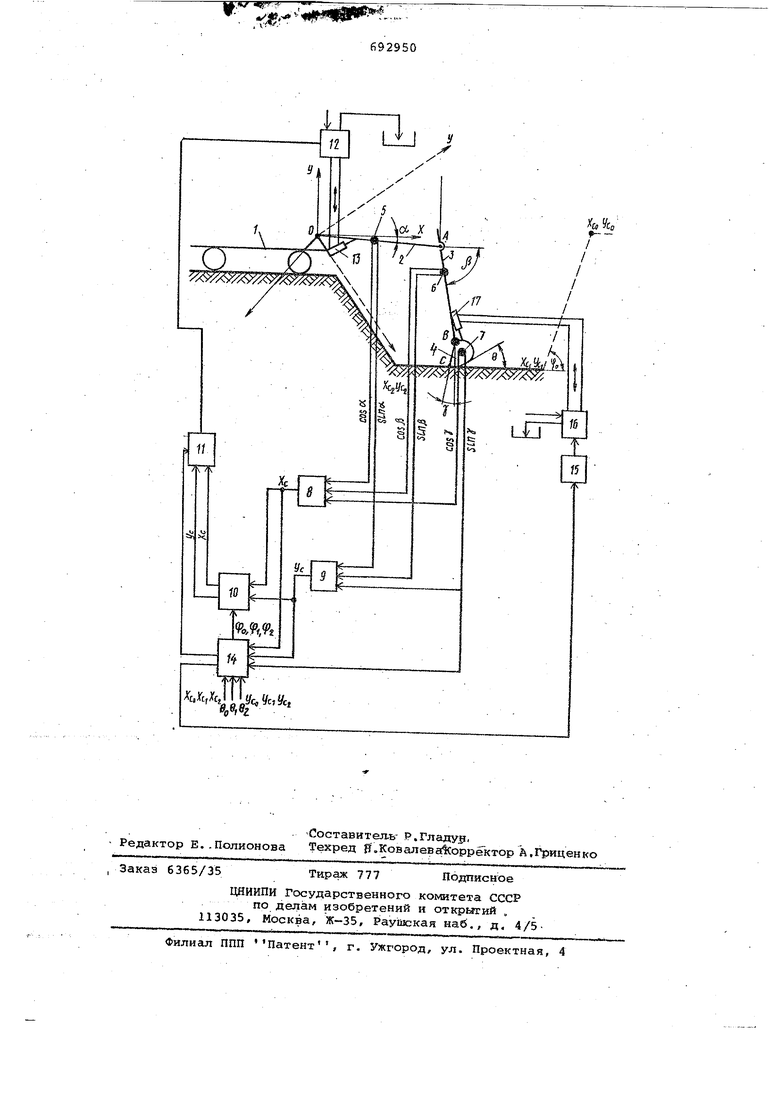
(54) УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭКСКАВАТОРОМ ,ны с выходами косинусных обмоток СИ: нусно-косинусных функциональных преобразователей углов наклона Элементов рабочего оборудования, синусные обмотки которых подключены к входам второго сумматора, а синусная обмотка, синусно-косинусного функционального преобразо зателя угла наклона ковша соединена с одним из входов программного блока, к двум другим входам которого и к входам тригономе трического блока подклют ены выходы обоих сумматоров, при этом выходы тригонометрического блока и один из выходов программного блока через оди ,из переключателей подключены кгидро распределителю управления стрелой, второй выход nporpaNBviHoro блока черёз второй переключатель подклк1 гён к гидрораспределителю управления ковшом, а третий его выход подключен к тригонометрическому блоку. На чертеже приведенафункциональная схема предлагаемого устройства. Экскаватор имеет базу 1, стрелу 2 рукоять 3, ковш 4, на которых устано лены- датчики , -например синусно-косинусные функциональные преобразователи 5, 6, 7, контролирующие углы ot, р Y наклона элементов рабочего оборудования к горизонту. Выходы косинусйых обмоток датчиков связаны с входом сумматора 8, а.выходы синусных обмоток датчиков связаны с входом сумматора 9. Свои выходами суммато ры 8 и 9 соединены с входами тригоно метрического блока 10, который через переключатель 11 стрелы связан с дро селирующим гидрораспределителем 12 стрелы, имеющим гидравлическую связь с гидроцилиндром 13 стрелы. Вторые выходы сумматоров 8 и 9 соединены, с входами программного блока 14;который в свою очередь связан d переклю чателем 11 стрелы и через переключа тель- 15 ковша с дросселирующим гидр распределителем 16 ковша, имеющим гидравлическую связь с гидроцилиндром 17 привода ковша. Устройство работает следующим об разом. Сигналы с выходов датчиков 5,6, 7, формирующих функцию косинуса угла наклона к горизонту, суммируются в сумматоре 8, а сигналы с выходов тех Же датчиков, формирующих функци синуса угла наклона, суммируются в сумматоре 9. Причем сигналы с датчи ков б и 7 умножаются в сумматорах 8 и 9 на масп.табные коэффициенты в со ответствии с соотношением линейных . размеров рабочих органов экскаватор Хо, : ,: , У s ОА : AS S ВС, где Xft - сигнал с синусной .обмотки датчика 5 Yq сигнал с косинусной обмотки датчика 5; . ОА - длина стрелы; АВ - длина рукояти; ВС - длина ковша; -2 коэффициенты пропорциональч ности; К ОА/АВ; К2 ОА/ВС. сигналы с выходов сумматоров 8 и 9 оответствуют координатам точки с ражущей кромки ковша экскаватора) и оступают втригонометрический блок 0, Осуществляющий операцию ортогоального преобразования - поворот истему координат XYZ относительно си 2 на требуемый угол Р , Решаемая десь система управлений - X X + Y Sini Y X Sin Y + Y Cos 7, де - ось абсцисс первоначальной ; (абсолютной) системы коорди- . нат; Y - ось ординат первоначальной (абсолютной) системы коЬрди ат;X - Ось абсцисс повернутой системы координат на требуемый угол; у - ось ординат повернутой систёмы координат на требуемый просто реализуется на четьрех операционных усилителях, а. значения выисленных координат точек Х и YC в повернутой системе координат хну поступают на переключатель 11 стрелы. Параллельно сигналы с выходов сумматоров 8 и 9, а также с выхода синусной .обмотки датчика 7 поступают в программный блок 14, где сравниваются с заданными координатами узловых точек Хдд, YCO 2tc, YC Xc,j, и со значениями заданного угла резания 0р, 8 , © ковша экскаватора. Поступающий 8 тригонометрргческий блок из . програ ммного б-лока сигнал несет информацию о значении угла, соответствующего повороту системы координат на требуемый угол Ч . При равенстве текущих координат точек разрабатываемого грунта с заданными узловыми точками из программного блока поступает сигнал в переключатель 11 стрелы, который автоматически меняет программу движения ковша экскаватора по заданной кусочно-линейной траектории. Дросселирующий гидрораспределитель 12стрелы управляет гидроцилиндром 13привода стрелы в соответствии с пбступаквдим .сигналами из пере- . , ключатепя 11. Через .переключатель 15 ковша управляющий сигнал поступает на дросселирующий гидрораспределитель 16 гидроцилиндра 17 привода ковша. Таким образом поддерживается оптимальный угол резания ковша. Устройство для автоматического уп равления экскаватором может быть реа лизовано следующим образом. В качест ве датчика применяются синусно-косинусные функциональнь е преобразователи. Сумматор представляет собой схему суммирования сигналов по массивной или активной схеме с операцион HfcOM усилителем и установкой коэффици ента пропорциональности. Тригонометрический блок собран из четырех onesрационных усилителей. Программный блок представляет собой систему начальных условий, задаваемьлх в соответствии с контролируеГЯлми координа гами узловых точек разрабатываемого грунта и оптимального угла резания ковша экскаватора. Переключатель реа лизуется по схеме сравнения, а дросс лирующий гидрораспределитель, например ПЭГ-ПМ или УГЭ-8, имеет плавный режим работы. Предлагаемое изобретение позволяет совер1яать за один цикл движения по какой-либо ломаной кусочно-линейной траектории; что является одним и существенных преимуществ, так как в настоящее время все большее внимание уделяется поперечной разработке тран шей. Применение данного устройства .при производстве земляных работ поз;волит практически исключить затраты ручного труда на подчистку дна траншей или планировку дна котлованов. Формула изобретенИя Устройство для автоматического уп равления экскаватором, содержащее гидравлические исполнительные меха изма перемещения ковша и стрелы с гидрораспределителями управления, си нусво-косинусные функциональные пре(образователи углов наклона элементов| рабочего оборудования, установленные на рабочих органах экскаватора, и аналоговую счетно-решающую cxeNry, отличающеес я тем, что, с целью повышения точности управления за .счет упрадения конструкции и расширения функциональных воэ.- ожностей, аналоговая счетно-решающая схема выполнена в виде двух сумматоров, тригонометрического и программного блока и двух переключателей, причем входы одного из сумматоров соединены с выходами косинусных обмоток синуснокосинусных функциональных преобразователей углов наклона элементов рабочего оборудования, синусные обмотки которых подключены к входам второго, сумматора, а синусная обмотка синусно-косинусного функционального преобразователя угла наклона ковша соединена с одним из входов программного блока, к двум другим входам которого и к входам тригонометрического блока подключены выходы обоих сумлаторов, при этом выходы тригонометрического блока и.один из выходов программного блока через один из переключателей подключены к гидрораспределителю управления стрелой, второй вы,ход программного блока через второй Переключатель подключен к гидрораспределителю управления ковшом,- а третий его выход подключен к тригонометрическому блоку. Источники информации принятые во вишлание при экспертизе 1.Авторское свидетельство № 353002, кл. Е 02 F 9/22, 1970. 2.Авторское свидетельство № 321600, кл. Е 02 F 9/20, 1969 {п рототип).
692950
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для защиты стрелы экскаватора | 1986 |
|
SU1416624A1 |
| Устройство для управления гидравлическим экскаватором | 1989 |
|
SU1778249A1 |
| Рабочее оборудование экскаватора | 1986 |
|
SU1435718A1 |
| Устройство для записи траекторий движения зубьев ковша одноковшового экскаватора | 1975 |
|
SU590408A1 |
| Устройство для защиты стрелы экскаватора | 1989 |
|
SU1649106A2 |
| Устройство для контроля и управления роторным экскаватором | 1984 |
|
SU1208135A1 |
| Экскаватор-драглайн | 1978 |
|
SU746049A2 |
| Устройство для определения загрузкиКОВшА дРАглАйНА | 1978 |
|
SU812886A1 |
| Устройство управления глубиной копания землеройной машины | 1988 |
|
SU1587150A1 |
| Устройство для управления двигателем двойного питания | 2016 |
|
RU2625720C1 |