1
Изобретение относится к медицинской технике, а именно к протезированию, и протезостроению, и может быть использовано для управления протезами нижних конечностей при высоких ампутациях.
Известно устройство для управления движениями протеза, содержащее последовательно соединенные тактильный датчик, первую муфту и коленный шарнир, последовательно соединенные привод, вторую,д муфту, аккумулятор, третью муфту и тазобедренный шарнир, а также соединенные между собой датчик накопленной энергии, подключенный к приводу, схему сравнения, соединенную с приводом ивто-)5 рой муфтой, и программирующий блок ij
Однако известное устройство не позво ляет осуществлять автоматическое регулирование основными параметрами движения20 протеза синхронно со здоровой тсонечнос- тью, что приводит к значительным силовым затратам на передвижение инвалида на таком протезе и к его утомляемости.
2
Целью изобретения является сокраще.ние силовик затрат на передвюкение и снижезгае утомляемости.
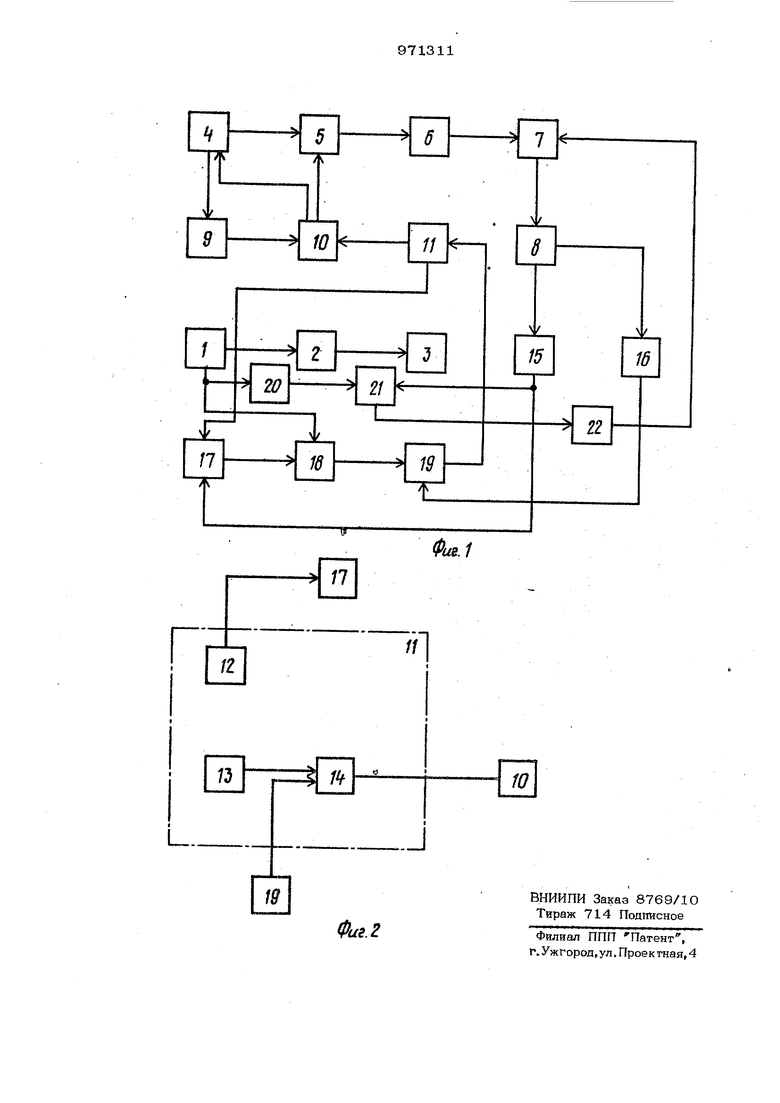
Зта цель достигается тем, что в устройство для управления движениями протеза, содержащее п следовательно соединенные тактильный датчик, первую муфту и коленный шарнир, последовательно соединеннбге привод, вторую муфту, аккумулятор, третью муфту и тазобедренный шарнир, а также соединенные между собой датчик накопленной энергии, подклю- ченный к приводу, схему сравнения, со©- , Д1шенную с приводом и второй муфтой, и программирующий блок, введены датчик утла и датчик угловой скорости, подключенные входами к тазобедренному шарниру, последовательно соединенные вторая схема сравнения, связанная с выходом программирующего бло1са и выходом датчика утла, первая схема управления и первый згшоминающий блок, выход которого подключен к блоку программ, а вход - к датчику угловой скорости, по397следовательно соединенные вторая схема управления, второй запоминающий блок и формирователь сигнала ущшвления yjловыми перемещениями, выход которого соединен с третьей муфтой, при этом так тильный датчик связан с первой и второй схемами управления, а вход запоминающего блока - с датчиком угла. Кроме того, программирующий блок содержит узел уровня срабатывания и соединенные между собой задатчик минимальной скорости и суммирующий усилитель. На фиг. 1 изображена ст гуктурная схема устройства для управл;ения движениями протеза; на фиг. 2 - структурная схема программирующего блока. Устройство содержит последовательно соединенные тактильный датчик 1, первую муфту 2 и коленный шарнир 3, последоБатально соединенные привод 4, вторую 1«гуфту 5, аккумулятор 6, третью муфту 7 и тазобедренньй шарнир 8, а также соединенные между собой датчик 9 накоп ленной энергии, подключе1шый к приводу 4, схему 10 сравнения, соединенную с приводом 4 и второй муфтой 5, и програм мирующий блок 11, содержащий узел 12 уровня срабатьгоания и соединенные между собой задатчик 13 минимальной скоро ти и суммирующий усилитешз 14, датчик 15 и датчик .16 угловой скорости, подключе1шые входами к тагюбедренному шарниру 8, последовательно соединенные вторую схему 17 сравнения, связанную с выходом прог1заммирующего блока 11 и выходом датчика 15 угла, первую схему 18 траъпення и первый запоминающий блок 19, выход которого подключен к блоку 11 программ, а вход - к датчнicy 16 ух ловой скорости, последовательно соединенные вторую схему 20 управления, второй запоминающий блок 21 и (}юрмирователь 22 сигнала /правления угловыми перемещениями, выход которо го соединен с третьей муфтой 7. При Э1ХЭМ тактильный датчик 1 свжан с первой и второй схемами 18 и 20 управления, а вход запоминающего блока 19 - с датчиком 15 угла. Устройство работает следующим образом. В исходном состоянии энергии аккуму лятора 6 равна нулю. На В1)1ходе датчика 9 накоплен}1ой энергии с 1гнал равен ну- лю, а значит на выходе схемы 1О сравнения ,пяется сигнал, который включает электропривод 4 и электромагнитну 14 муфту 5. Так как в этот период на схему 10сравнения из программирующего блока 11поступает сигнал минимальной скорости, то аккумулятор 6 накапливает энергию, необходимую для переноса протеза с минимальной скоростью. В этот период протез находится в фазе опоры и по мере переноса тела вперед в тазобедренном щарцире 8 протеза происходит перемещение, которое воспринимается датчиком 16 угловой скорости и датчиком 15 утла. При достижении датчиком 15 определенного утла, заданного углом 12 уровня срабатБгоания, вторая схема 17 сравнения, на которую передается информация .с датчика 15, через схему 18 управления дает разрешение на поступление информации с датчика, 16 в запоминающий блок 19, с выхода которого сигнал передается на первый вход суммирующего усилителя 14 программирующего блока 11, на второй вход которого поступает сигнал с задатчика 13 минимальной скорости. С выхода усилителя 14 программирующего блока 11 сигнал передается в схему 10 сравнения. В результате происходит подзаряд аккумулятора 6 на величину, пропорциональную сигналу угловой скорости, что определяет скорость переноса протеза. При достижении сигналом, поступаюш;и;м с датчика 9, величинысигнала, поступающего с программирующего блока 11, на выходе схемы 10 сравнения появляется нулевой сигнал, который отключает электропривод 4 и электромагнитную 5. В конечный момент опорной фазы протеза, то есть когда угол в тазобедренном шарнире 8 протеза соответствует длине шага второй конечности, срабатывает тактильный датчшг 1, сигнал которого поступает на вторую схему 2О управления, которая дает разрешение на передачу информации, пропорциональной углупереноса второй конечности. Одновременно с датчика 15 утла сигнал передается в запоминающий блок 21, с выхода которого сигнал поступает в формирователь 22 сигнала управления угловыми перемещ пиями, где формируется импульс, длительность которого попорционаяьна входному сигналу, а значит длине переноса здоровой конечности. Этот шугпульс включает электромагнитную муфту 7, которая подключает аккумулятор 6 к тазобедренному шарниру 8 на время, равное длительности импульса, обеспечивая тем самым длину шага протеза, близкую к длине щага второй конечности. Следовательно, скорость переноса и длина шага протеза определяются скоростью переноса и длиной шага второй конечности. В начале опоры на протез срабатывает тактильный датчик 1. По сигналу с датчика 1 выключается электромагнитная муфта 7. В результате коленный шарнир 3 фиксирует коленный узел, а через схемы 18 и 2О упраш1ения передается сигнал сбрю в запоминаюшме блоки 19 и 21. Описан ный процесс повторяется. Накопление энергии в аккумуляторе 6 происходит в один прием и даже при самом медленном темпе ходьбы до поступления сигнала коррекции со схемы 1О сравнения аккумулятор 6 не получает заданного минимального объема энергии. Предложенное устройство позволяет посредством автомат1иеского регулирова ния скорости и длины шага протеза в соответствии со скоростью переноса и длиной шага здоровой ноги обеспечить синхронное перемещение протеза в соответствии с движением здоровой конечности. Это расширяет область назначени протезов нижних коненностей, а именно появляется возможность протезирования инвалида с более высоким уровнем ампутации. Использование системы управле ния с внешним источником анергии по- зволяет частично заменить . ускульную энергию инвалида, затрачиваемую на пер нос протезированной конечности и управление протезом. Это позволит сократить энергозатраты инвалида в 1,3 раза и проводить более полную реабилитацию ин .в 1лидов с высокими ампутациями нижних конечностей. Формула изобретения 1. Устройство для управления движен ями протеза, содержащее последователь- но соединенные тактильный датчик, пер- вую муфту и коленный шарнир, последовательно соединенные привод, вторую муфту, аккумулятор, третью муфту и тазобедренный шарнир, а также соединенные между собой датчик накопленной энергии, подключенный к приводу, схему сравнения, соединенную с приводом и второй муфтой, и программирующий блок, отличающееся тем, что, с целью сокращения силовых затрат на передвижение и снижения утомляемости инвалида, в него введены датчик угла и датчик угловой скорости, подключенные входами к тазобедренному шарниру, последовательно соединенные втория схема сравнения, связанная с выходом програм- мирутошего блока и выходом датчика угла, первая схема управления и первый запоминающий блок, выход которого подключен к блоку программ, а вход - к датчику угловой скорости, последовательно соединенные вторая схема управления, второй запоминающий блок и формирователь сигнала управления угловыми перамещениями, выход которого соединен с третьей муфтой, при этом тактильный датчик связан с первой и второй схемами управления, а вХод запоминающего блока - с датчиком угла. 2. Устройство по п. 1, о т я и ч а ющ е е с я тем, что програмируюший блок содержит узел уровня срабатьгеания и соедененные собой задатчик минимальной скорости и суммирующий усилитель. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 721О92, кл. А 61Р 1/06, 1978.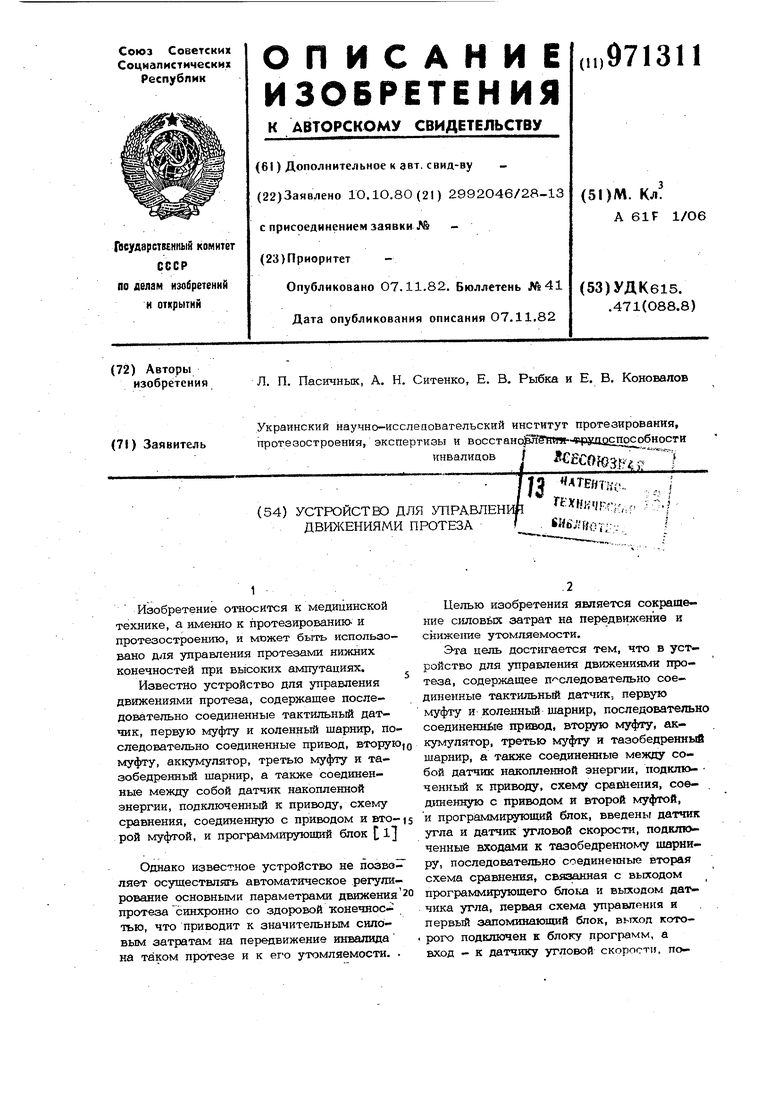
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления движениями конечностей экзоскелетона | 1977 |
|
SU721092A1 |
| Протез нижней конечности | 1978 |
|
SU806024A1 |
| Устройство управления протезом нижней конечности | 1982 |
|
SU1041108A1 |
| Устройство для управления протезами нижних конечностей | 1985 |
|
SU1447366A1 |
| Протез нижней конечности | 1982 |
|
SU1026802A1 |
| Протез бедра с управляемым коленным шарниром | 1985 |
|
SU1351599A1 |
| Протез нижней конечности | 1984 |
|
SU1342493A1 |
| Протез бедра | 1982 |
|
SU1074522A1 |
| Протез нижней конечности (его варианты) | 1983 |
|
SU1281268A1 |
| ПРОТЕЗ БЕДРА | 1990 |
|
RU2019155C1 |