Изобретение относится к области станкостроения и предназначено .цля предотвращения падения противовесов узлов станка, перемещающихся по вертикали, например шпиндельных бабок на горизонтально-расточных станках.
Известен механизм для улавливания перемещающегося вдоль направляющих противовеса при обрыве гибкой связи, соединяющей противовес с уравновешиваемым узлом, перемещаемым от привода подачи. Данный механизм содержит гайку, установленную на некотором расстоянии под противовесом на винте, свободно проходящем через противовес и кинематически связанном с приводом подачи уравновешиваемого узла.С11Недостатком известного механизма являются большие габариты, выходящие из рабочей зоны противовеса в результате наличия кинематической связи BHfiTa с приводом подачи уравновешиваемого узла. В современных станках с ЧПУ, имеющих большое количество всевозможных механизмов, это обстоятельство приобретает важное значение . из-за сложности компоновки узлов. Кроме того, недостатком данного механизма является сложность обеспечения
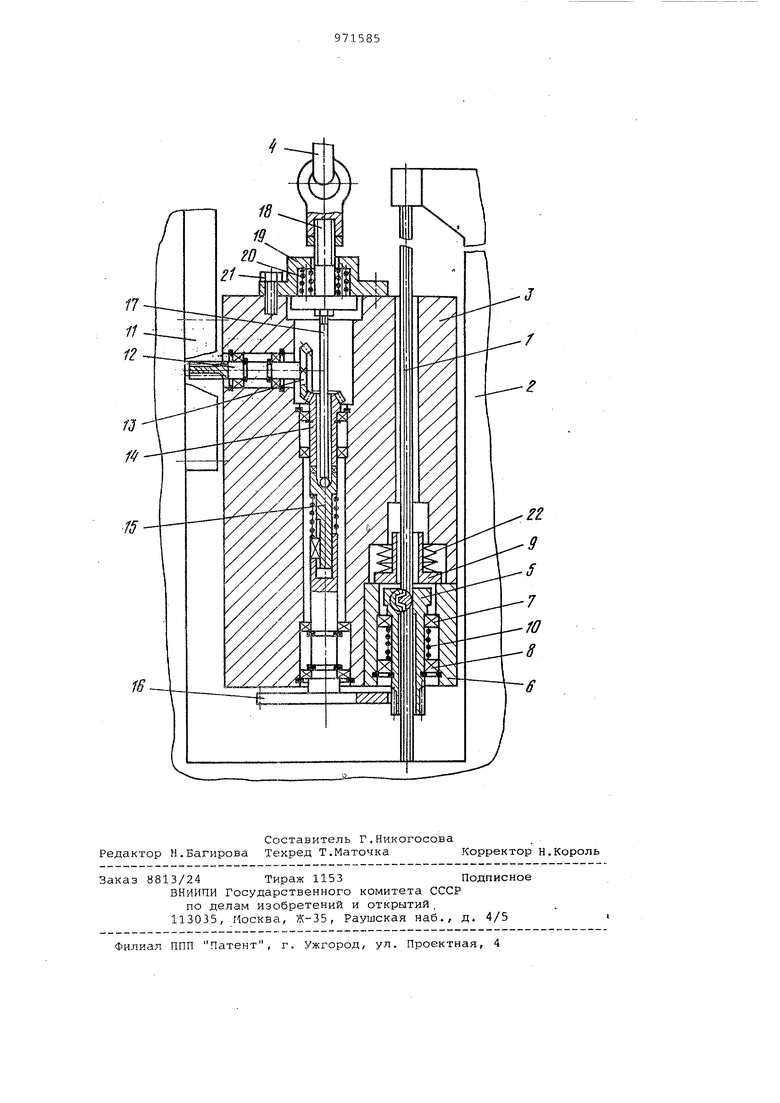
кинематической связи винта с приводом подачи уравновешиваемого узла и, следовательно, ограниченная область применения. Для такого механизма характерна малая нагрузочная способность, которая вызвана нежесткостью опор пары винт-гайка в осевом направлении, поскольку они состоят из подшипников качения, воспринимающих ударную нагрузку. Кроме того, недостатком конструкции является необходимость регулировки механизма в процессе эксплуатации, так как зазор между гайкой и противовесом выбирается при изменении длины гибкой связи, например троса, под действием естественной вытяжки последнего от действия на него веса уравновешиваемых узлов. При увеличении этого зазора с целью исключения выбора его от вытяжки гибкого элемента, в случае обрыва последнего, увеличивается сила удара. Регулировка механизма всякий раз при выборе зазора -заключается в отведении гайки на некоторое расстояние от противовеса. Недостатком является также жесткий контакт гайки с проти- вовесом при обрыве троса, в результате которого резьба гайки и винта способна разрушаться. Целью изобретения является уменьшение гаваритов/ расширение области применения и исключение регулировки в процессе эксплуатации путем исключения кинематической связи винта с приводом подачи, повышение надежноети и уменьшение времени срабатывания (Повышение нагрузочной способности. Цель достигается тем, что известный механизм снабжен рейкой, связанной посредством введенных и взаимодействующих между собой вал-шестерни пруисинно-кулачковой муфты и шестерни с гайкой, установленной в выполненной в противовесе расточке на опорах причем винт жестко закреплен в стойке. Кроме того, механизм снабжен жестко соединенньм с гибкой связью подпружиненным штоком, второй конец которого размещен в выполненном в по лумуфте сквозном отверстии. Одна из опор, воспринимающая при падении про тивовеса осевую нагрузку, установлена с возможностью перемещения в осевом направлении относительно гайки, другая опора - с возможностью перемещения в осевом направлении относительно противовеса, а между ними установлен упругий элемент, механизм снабжен пакетом тарельчатых пружин, разме1ценных на винте. На чертеже изображен механизм, общий вид. Механизм состоит из винта 1, жест ко закрепленного на стойке 2, на направляющих которой размещен с возможностью перемещения противовес 3, соединенный с уравновешиваемым узлом (на чертеже не показан) гибкой связью 4. На винте 1 установлена гай ка 5 с зазором в резьбе. Этот зазор выбирается только с учетом технологической целесообразности, так как он не меняется при изменении длины гибкой связи, например троса, под действием естественной вытяжки последнего от действия на него веса уравновешиваемых узлов. Гайка 5 установлена в корпусе 6 подшипников 7 и 8 качения с зазором между ее верхним торцом и фланцем 9, причем подшипник 7 имеет возможность перемещения в осевом направлении относительно гайки 5, а подшипник 8 имеет возможность перемещения в осевом направлении относительно противо веса 3. Между подшипниками 7 и 8 установлена пружина 10 сжатия. Гайка 5 соединена с реечной передачей, ими тирующей винт уравновешиваемого узла состоящей из рейки 11, закрепленной вдоль направляющих противовеса 3, и вал-шестерни 12, посредством кинематической связи, состоящей из коничес ких зубчатых колес 13 и 14, пружинно-кулачковой муфты 15- осевого типа и зубчатого колеса 16. В коническом зубчатом колесе 14, являющемся также полумуфтой пружинно-кулачковой муфты 15 осевого типа, выполнено сквозное отверстие, в которое входит шток 17, жестко соединенный с гибкой связью 4 посредством тяги 18. Тяга 18 установлена в рааточке опоры 19, причем между опорой 19 и гайкой 18 установлена предварительно сжатая пружина 20, а опора 19 жестко соединена с противовесом 3 болтами 21. В расточке противовеса размещен пакет тарельчатых пружин 22, воздействующих на противовес 3 и фланец 9. Механизм работает следующим образом. При перемещении уравновешиваемого узла и противовеса 3 гайка вращается вокруг винта 1 от реечной передачи, при этом сохраняется постоянство sat. вора в резьбе между гайкой 5 и винтом 1, что обеспечивается определенным передаточным отношением кинематической связи. При. вытяжке гибкой связи 4противовес 3 опускается на величину вытяжки, а гайка 5 поворачивается на определенный угол от реечной передачи, сохраняя таким образом постоянство зазора в резьбе между гайкой 5и винтом 1. Постоянство зазора между гайкой 5 и фланцем 9 обеспечено конструктивно. В случае обрыва гибкой связи 4 происходит размыкание пружинно-кулачковой муфты 15 осевого типа. Противовес 3 совместно с гайкой 5 падает до тех пор, пока не произойдет соприкосновения гайки 5 с винтом 1. При дальнейшем падении противовеса 3 происходит перемещение подшипника 7 совместно с корпусом 6 вниз относительно неподвижной уже гайки 5 и подшипника 8, а также деформация пружины 10 до соприкосновения фланца 9 с гайкой. Возникающая при этом сила удара в значительной степени амортизируется набором тарельчатых пружин 22. Пружинно-кулачковая муфта 15 настраивается на момент, необходимый для преодоления момента инерции гайки 5, зубчатого колеса 16 и с ним соединенной полумуфты при наибольших скоростях разгона, торможения и реверса уравновешиваемого узла. Размыкание пружинно-кулачковой муфты 15 при обрыве гибкой связи 4 происходит вследствие того, что при этом резко возрастает скорость вращения полумуфтн, взаимодействующей с реечной передачей, а момент инерции гайки 5, зубчатого колеса 16 и с ним соединенной полумуфты оказывается гораздо больше момента, на который она настроена. Для уменьшения времени и повьпае.ния надежности срабатывания размыкание пружинногкулачковой муфты 15 при обрыве гибкой связи 4 осуществляется под воздействием дополнительного механиэма, состоящего из тяги 18, шток 17 и пружин 20, следующим образом. Под воздействием пружин 20, ранее сжатых силой тяжести противовеса 3, тяга 18 перемещает вдоль сквозного отверстия в полумуфте шток 17, который, воздействуя на вторую полумуфту {ВЫВОДИТ ее из зацепления с первой, т.е. размыкает пружинно-кулачковую муфту 15. Исключение кинематической связи винта с приводом подачи позволяет расширить область применения за счет получения возможности установки противовеса в местах, где трудно обеспечить кинематическую связь винта с приводом подачи уравновешиваемого уз ла, а также обеспечивает исключение зависимости зазора между гайкой и противовесом от вытяжки гибкой связи и, следовательно, устраняет необходи мость регулировки. Предлагаемое изобретение позволяет также уменьшить время и повысить надежность срабатывания при увеличен ных скоростях разгона, торможения и реверса уравновешиваемого узла, повысить нагрузочные способности под шипников, в которые установлена гайк и предохранить их от разрушения путем исключения воздействия осевых нагрузок на подшипники качения пары винт-гайка, а также предохранить резьбу гайки и винта от разрушения при падении противовеса путем установки амортизатора между гайкой и противовесом. Формула изобретения 1. Механизм для улавливания проти вовеса при обрыве гибкой связи, перемещающегося вдоль направляющих стойки, содержащий гайку, размещенную на винте, свободно проходящем через противовес, отличающийся тем, что, с целью уменьшения габаритов, расширения области применения и исключения регулировки в процессе эксплуатации путем исключения кинематической связи винта с приводом подачи, механизм снабжен рейкой, связанной посредством введенных и взаимодействующих между собой вал-шестерни, пружинно-кулачковой муфты и шестерни с гайкой, установленной а выполненной в противовесе расточке на опорах, причем винт жестко закреплен в стойке . 2.Механизм по п. 1,отличзющ и и с я тем, что, с целью повышения надежногти и уменьшения времени срабатывания, он снабжен жестко соединенным с гибкой связью подпружиненным штоком, второй конец которого размещен в выполненном в полумуфте сквозном отверстии. 3.Механизм по п. 1, отличающийся тем, что, с целью повышения нагрузочной способности и предохранения опор, в которых установлена гайка, от разрушения .при падении противовеса, опора, воспринимающая при падении противовеса осевую нагрузку, установлена с возможностью перемещения в осевом направлении относительно гайки, другая опора - с возможностью перемещения в осевом направлении относительно противовеса, а между ними установлен упругий элемент. 4.Механизм по п. 3, отличающийся тем, что, с уелью предохранения резьбы гайки и винта от разрушения при падении противовеса, он снабжен пакетом тарельчатых пружин, размещенных на винте. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР I 279299, кл. В 23 В 35/00 1965,
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для уравновешивания вертикально подвижного узла | 1982 |
|
SU1060340A1 |
| Предохранительное устройство механизма уравновешивания вертикально-подвижного узла | 1983 |
|
SU1085699A1 |
| РЕВЕРСИВНЫЙ ПРОКАТНЫЙ СТАН | 1996 |
|
RU2112614C1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД СО СТРУЙНЫМ ДВИГАТЕЛЕМ ДЛЯ ЗАПОРНО-РЕГУЛИРУЮЩЕЙ АРМАТУРЫ ГАЗО-, НЕФТЕ- И ПРОДУКТОПРОВОДОВ, МЕХАНИЗМ АВТОМАТИЧЕСКОГО ОТКЛЮЧЕНИЯ ШТУРВАЛА РУЧНОГО ДУБЛЕРА | 2007 |
|
RU2334132C1 |
| Устройство для уравновешивания подвижного узла | 1981 |
|
SU948551A1 |
| БЛОК РУЛЕВЫХ ПРИВОДОВ | 1999 |
|
RU2154593C1 |
| Устройство для свинчивания деталей | 1981 |
|
SU973287A1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ ЗАПР'АВКИ ЭКСТРУДИРУЕМЫХ ТЕРМОПЛАСТИЧНЫХ ТРУБ В ТЯНУЩЕЕ УСТРОЙСТВО | 1979 |
|
SU825321A1 |
| Прокатная клеть | 1986 |
|
SU1342545A1 |
| Ротор для механической обработки заготовок | 1978 |
|
SU740479A1 |