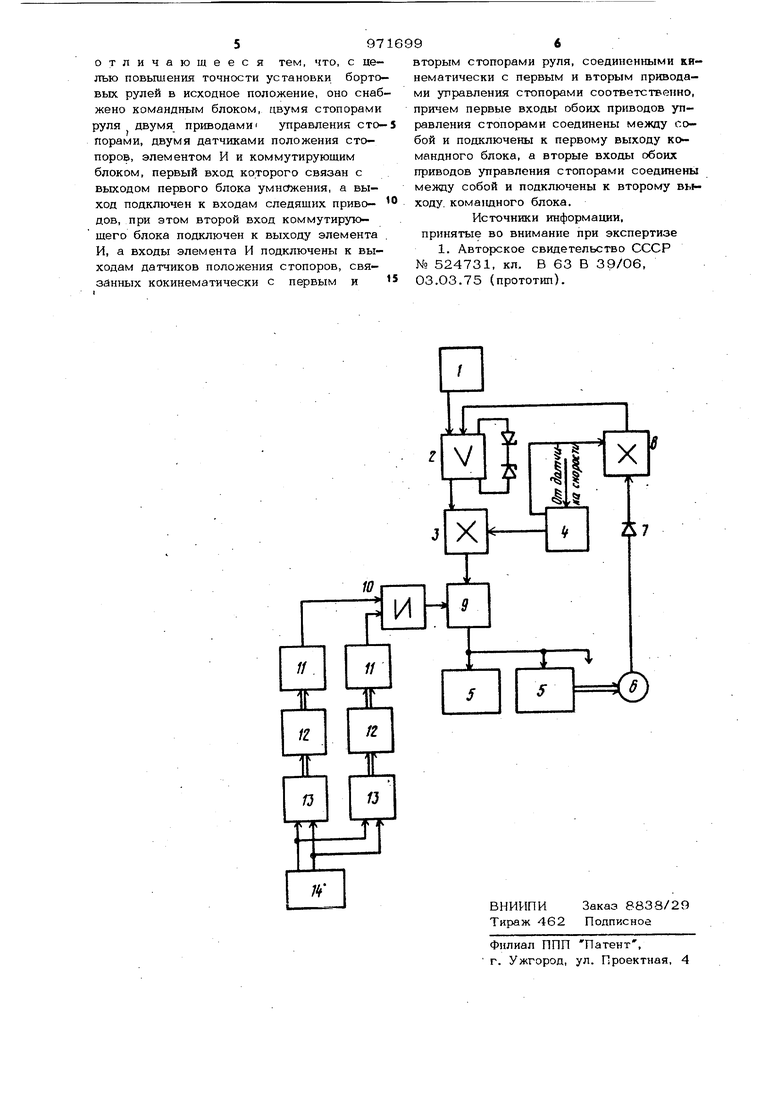
элементом И, и коммутирующим блоком первый вход которого связан с выходом первого блока умножения, а выход подклю чен ко входам следящих приводов. Вход коммутирующего блока подключен к выходу влемента И. Входы элемента И подклю чены к выходам датчиков положения стопоров, связанных кинематически с первым и вторым приводами управления стопорам соответственно. Первые вход1э1 приводов управления стопорами соединены между собой и подключены к первому выходу командного блока, а вторые входы соединены между собой и подключены ко второму выходу командного блока, На Чертеже показана- структурная схема предлагаемого устройства. Устройство содержит формирователь 1 сигнала управления, операционный усилитель 2 с ограничением, к входу которого подключен формирователь 1 блок 3 умно жения, к входу которого, подключен усилитель 2, функциональный преобразователь 4 сигнала от датчика скорости, один из выходов которого подключен к входу блока 3 умножения, следящие при- ВОДЬ 5 поворота бортовых рулей, датчик положительной обратной связи 6 по углу поворота бортовых рулей, соединенный ме ханически с выходом привода 5 и элект- рически через фазочувствительный выпрямитель 7 со вторым блоком умножения 8 к другому входу которого подключен один из выходов преобразователя 4 а выход второго блока умножения 8 подключен к усилителю 2. Блок 3 умножения соединен со следящими приводами 5 через коммугарующий блок 9, ко второму входу которого подключен выход элемента И 10. Входы элемента И 10 подключены к выходам датчиков 11 положения стопора, механически соединенных с соответствую щими стопорами 12 руля, каждый из которых также механически связан с соответствующим приводом 13 управления стопором 12. Первые входы приводов 13 соединены между собой и подключены к первому выходу командного блока 14, а вторые входы соединены между собой и подключены ко второму выходу командного блока 14. Во время работы успокоителя качки сигнал с выхода формирователя 1 через усилитель 2 блок умножения 3 и коммутирующий блок 9 поступает на входы при водов 5 поворота бортовых рулей. Сигнал с выхода датчика 6 через фазочувстви- тельный выпрямитель 7 и второй блок 8 умножения поступает на вход усилителя 2 И корректирует сигнал управления гак, чтобы лучше компенсировать изменения возмущающего момента, действующего на судно, т. е. повьпиает эффективность умерения качки. На вторые входы блоков 3 и 8 умножения поступает сигнал от преобразователя 4 сигнала от датчика скорости, благодаря чему сохраняется высокая эффективность умерения качки при изменении скорости хода. Перед включением успокоителя качки рули находятся в застопороенном положении, а сигнал управления не поступает с выхода множительного устройства на входы приводов 5, так как коммутирующий блок 9, выполненный, например, в виде реле, удерживает цепь сигнала управления- в разомкнутом состоянии. При включении успокоителя качки командный блок 14, выполненный, например, в виде кнопок, подает питание на приводы 13 управления стопорами, которые выводятстопоры 12 из начального положения, когда рули застопорены, т. е. рули расетопориваются. Положение стопоров 12 фиксируется датчиками 11, выполненными, например, в виде конечных выключателей ; электрические сигналы о paccronopeiuiOM положении рулей поступают на вход элемента И, управляющего коммутирующим блоком 9. Таким образом, после расстопо- ривания рулей коммутирующий блок 9 замыкает цепь сигнала управления, соединяя выход блока 3 умножения с входами приводов 5. При вьпслючении успокоителя качки командный блок 14 управляет приводами 13, которые устанавливают стопоры 12 в положение, обеспечивающее надежное стопорение рулей в нерабочем состоянии. Датчики 11, фиксируя положение стопоров, воздействуют через элемент И на коммутирующий блок 9, который размыкает цепь сигнала управления, что обеспечивает повыщение точности и надежности установки бортовых рулей в нерабочее (исходное) состояние. Предлагаемое устройство позволяет обеспечить установку рулей в нерабочее состояние с любой практически необходимой точностью и высокой надежностью за счет того, что усилия, возникающие на рулях, воспринимаются стопорами, и баллеры в этом случае неподвижны. Формула изобретения Устройство для управления успокоителем качки судов по.авт. св. № 524731, отличающееся тем, что, с целью повышения точности установки борто вых рулей в исходное положение, оно снаб жено командным блоком, двумя стопорами руля двумя приводами управления стопорами, двумя датчиками положения стопоров, элементом И и коммутирующим блоком, первый вход которого связан с выходом первого блока умнспкения, а выход подключен к входам следящих приводов, при этом второй вход коммутирующего блока подключен к выходу элемента И, а входы элемента И подключены к выходам датчиков положения стопоров, связанных кокинематически с первым и вторым стопорами руля, соединенными кинематически с первым и вторым приводами управления стопорами соответственно, причем первые входы обоих приводов управления стопорами соединены между собой и подключены к первому выходу командного блока, а вторые входы обоих приводов управления стопорами соединены между собой и подключены к второму выходу, командного блока. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 524731, кл. В 63 В 39/06, 03.03.75 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления бортовыми рулями успокоителя качки судна | 1983 |
|
SU1147636A1 |
| Устройство для управления успоко-иТЕлЕМ КАчКи СудОВ | 1979 |
|
SU796069A2 |
| Устройство для управления успокоителем качки судов | 1975 |
|
SU524731A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ УСПОКОИТЕЛЕМ КАЧКИ СУДНА | 1991 |
|
RU2013295C1 |
| Устройство для управления успокоителем качки судна | 1978 |
|
SU694418A1 |
| Система управления бортовыми рулями успокоителя качки судна | 1976 |
|
SU597591A1 |
| Устройство для управления успокоителем качки судна | 1977 |
|
SU679473A1 |
| Устройство управления успокоителем качки судов | 1973 |
|
SU481496A1 |
| Устройство формирования сигнала установки рулей успокоителя качки в нулевое положение | 1973 |
|
SU472852A1 |
| Устройство для установки бортовых рулей успокоителя качки в нулевое положение | 1972 |
|
SU466146A1 |
