1
Изобретение относится к области судовой автоматики и предназначено для управления следящими электрогидравлическими приводами бортовых рулей, а также может быть использовано в системах стабилизации .курса судов.
Известно устройство для управления ус;покоителем качки судна, содержащее фор.мирователь сигиала управления по откло.нению объекта, соедииениый одним своим .выходом с одним из входов суммирующего
блока с ограиичением, а другИлМ - через
блок масштабных элементов со входом дифференцирующего усилителя, выход которого соединен с одним из входов функцио.нального нелииейного преобразователя, соединенного своим выходом с другим входом суммирующего блока с ограничением, выход которого предназначен для подключения к следящим приводам бортовых ру.лей 1 .
Иедостатком известного устройства является невысокая точность управления при .изменении скорости хода судна в широком диапазоне.
.Цель изобретения - повышение точности унравления при изменении скорости хода.
Цель достигается тем, что предлагаемое устройство снабжено дополнительным функциональным преобразователем, выход которого соединен с другим входом фуикционального нелинейного преобразователя, а вход предназначен для подключения к датчику скорости хода судна.
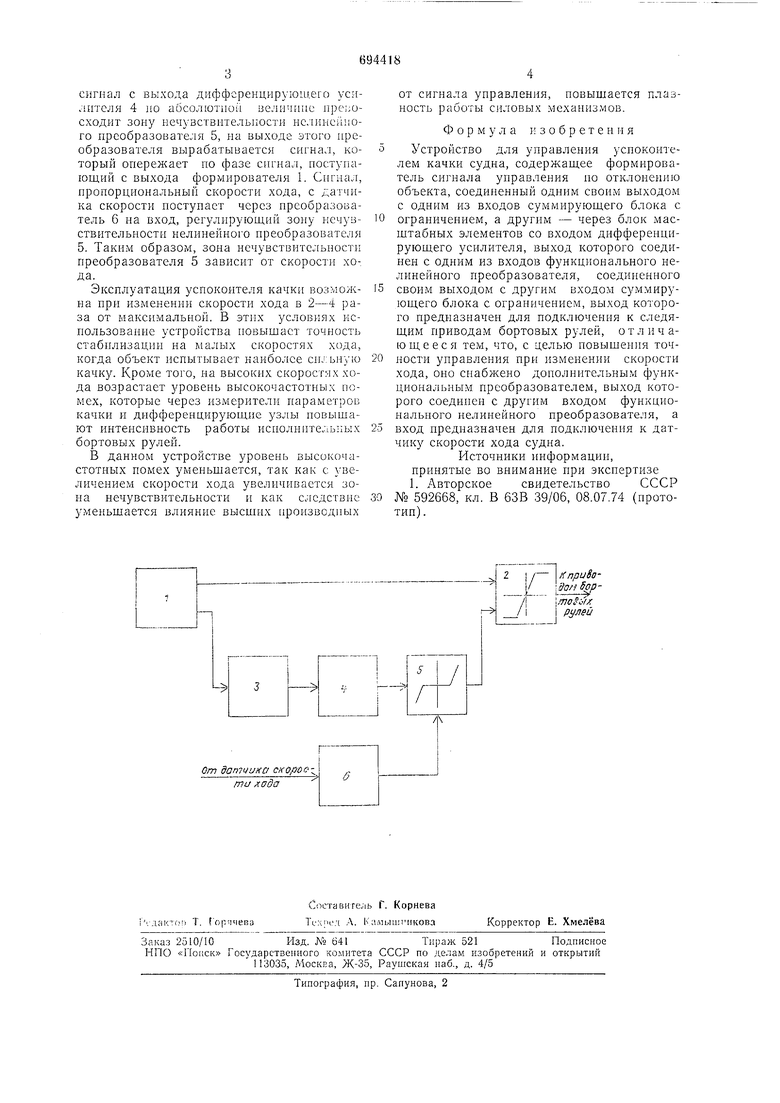
На чертеже иредставлена функциональная схема предлагаемого устройства.
Устройство содержит формирователь 1 сигнала управления по отклонению объекта, выходы которого подключены к одному из входов суммирующего блока 2 с ограиичением сигнала и через блок 3 масштабных элементов ко входу дифференцирующего усилителя 4, соединенного с одним из входов функционального нелииейного преобразователя 5, у которого другой вход, регулпрующий зону нечувствительности, подключен через дополнптельный функциональный преобразователь 6 к датчпку скорости хода судна (на чертеже не показан), а выход преобразователя 5 подключен к другому входу суммирующего блока 2.
Устройство работает следующим образом.
Во время работы бортовых рулей усиокоителя качки сигнал с выхода формирователя 1 поступает на вход суммпрующего блока 2 и через блок 3 масштабных элементов на вход дифференцирующего усилителя 4. Цри амплитудах остаточной качки, когда
сигнал с выхода дифференцирующего усилителя 4 но абсолютиой величние npeijoсходит зону нечувствнтелыюстн нс.шнсГиюго преобразователя 5, на выходе этого преобразователя вырабатывается сигнал, который опережает по фазе сигнал, поступающий с выхода формирователя 1. Сигнал, пропорциональный скорости хода, с датчика скорости поступает через преобразователь 6 на вход, регулнрующий зону нечувствительности нелинейного преобразователя 5. Таким образом, зопа нечувствительпостн преобразователя 5 зависит от скорости хода.
Эксплуатация успокоителя качки возможна при изменении скорости хода в 2-4 раза от максимальной. В этих условиях использование устройства иоБЫшает точность стабилизации на малых скоростях хода, когда объект испытывает наиболее сильную качку. Кроме того, па высоких скоростях хода возрастает уровень высокочастотных помех, которые через измерители параметров качки и днфференцирующпе узлы повышают интенсивность работы исполн1ггс;1ьных бортовых рулей.
В данном устройстве уровень высокочастотных помех уменьшается, так как с увеличением скорости хода увеличивается зона нечувствительности и как следствие Зменьшается влияние высших производиых
от сигнала управления, повышается плазность работы силовых мехапизмов.
Формула и 3 о б р е т е и и я
Устройство для управления успокоителем качки судна, содержашее формирователь сигнала управления по отклонению объекта, соединенный одним своим выходом с одним из входов суммируюш,его блока с ограничением, а другим - через блок масштабных элементов со входом дифферепцируюш,его усилителя, выход которого соединен с одним из входов функционального нелинейного преобразователя, соединенного своим выходом с другим входом суммирующ,его блока с ограничением, выход которого предназначен для подключения к следящим приводам бортовых рулей, отличающееся тем, что, с целью повышения точности управления при изменении скорости хода, оно снабжено дополнительны.м функциональным преобразователем, выход которого соединен с другим входом функционального нелинейного преобразователя, а вход предназначен для подключения к датчику скорости хода судна.
Источники информации, принятые во внимание при экспертизе 1. У вторское свидетельство СССР № 592668, кл. В 63В 39/06, 08.07.74 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ УСПОКОИТЕЛЕМ КАЧКИ СУДНА | 1991 |
|
RU2013295C1 |
| Устройство для управления бортовыми рулями успокоителя качки судна | 1983 |
|
SU1147636A1 |
| Устройство для управления успоко-иТЕлЕМ КАчКи СудОВ | 1979 |
|
SU796069A2 |
| Устройство для управления успокоителем качки судов | 1975 |
|
SU524731A1 |
| Устройство для управления успокоителем качки судов | 1981 |
|
SU971699A2 |
| Устройство управления успокоителем качки судов | 1973 |
|
SU481496A1 |
| Система управления бортовыми рулями успокоителя качки судна | 1976 |
|
SU597591A1 |
| Устройство для формирования сигнала управления бортовыми рулями успокоителя качки судна | 1973 |
|
SU484123A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ УСПОКОИТЕЛЯ КАЧКИ СУДНА С БОРТОВЫМ УПРАВЛЯЕМЫМ РАЗРЕЗНЫМРУЛЕМ | 1970 |
|
SU265745A1 |
| Устройство для формирования сигнала управления бортовыми рулями успокоителя качки судна | 1980 |
|
SU897631A2 |
М
- Knpu8o 9M Soj3 meSMX./ i I рулей
j
-
От датчихо скорооти ада
