ножения, к входам которого подключены соответственно выход функционального преобразователя сигнала датчика скорости хода и через фазочувствительный вьпфямитель - датчик положительной обратной связи, а выход дополнительного блока умножения подключен к входу операционного усилителя с ограничением.
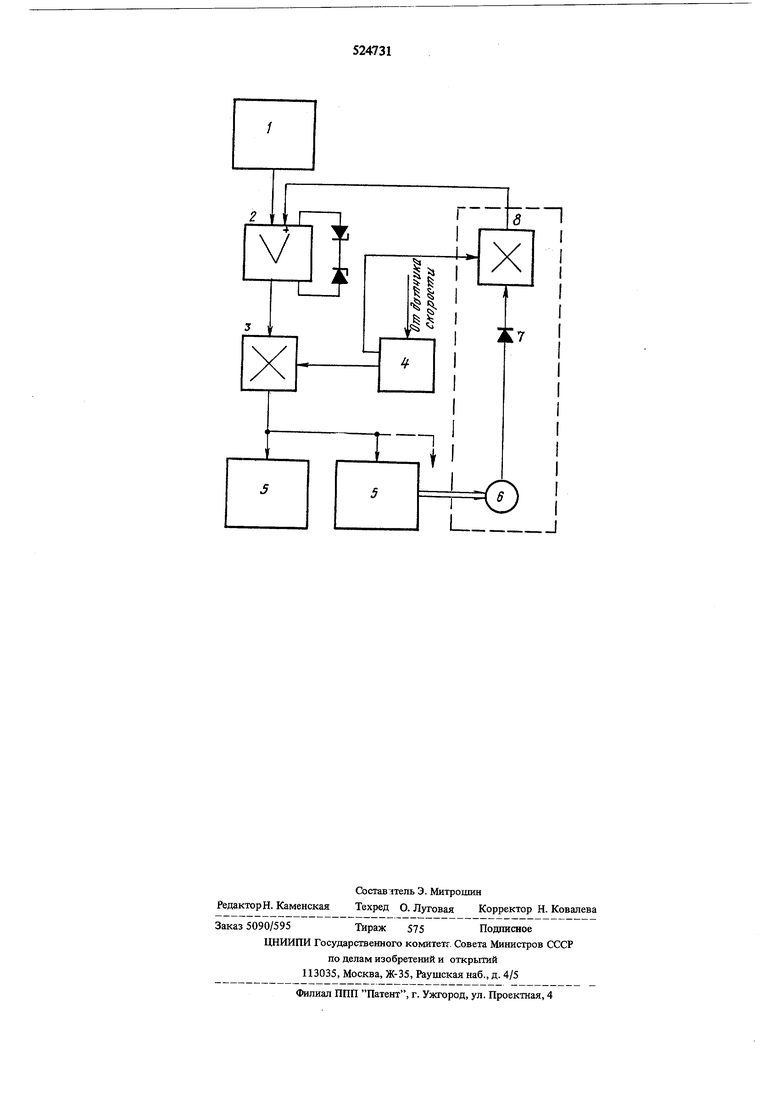
На чертеже показана блок - схема предлагаемого устройства.
Устройство содержит формирователь 1 сигнала управления; операционньш усилитель 2 с ограничением, к входу которого подключен формирователь сигнала управления, блок умножения 3, к входу которого подключен операционный усилитель с ограничением, .функциональный преобразователь 4 сигнала от датчика скорости, один из выходов которого подключен к входу блока умножения 3; следящие приводы 5 поворота бортовых рулей, к входам которых подключен выход блока умножения 3; датчик положительной обратной связи 6 по углу поворота бортовых рулей соединенный механически с выходом следящего привода 5 и злектрически через фазочувствительньш вьшрямитель 7 с дополнительным блоком умножения 8, к другому входу которого подключен один из выходов функционального преобразователя 4 сигнала от датчика скорости, а своим выходом дополнительный блок умножения подключен к операционному усилителю 2 с ограничением.
Во время работы успокоителя качки сигнал с выхо да формирователя 1 сигнала управления через операционньш усилитель 2 с ограничением и блок умножения 3 постзшает на входы следящих приводов 5 поворота бортовых рулей. Сигнал с датчика положительной обратной связи 6 по углу поворота бортовых рулей через фазочувствительньш вьшрямитель 7 и дополнительный блок умножения 8 поступает на вход операционного усилителя с ограничением и увеличивает угол перекладки рулей так, чтобы колшенсировать изменения возмущающего момента ействующего на судно, т. е. повышает зффективность умереш1я качки. На второй вход дополнительного блока умножения 8 поступает сигнал от
функционального преобразователя сигнала от датчика скорости, которьш обеспечивает независи мость величины положительной связи от скорости хода судна, благодаря чему сохраняется высокая эффективность умерения качки при изменении ско рости хода.
Технико-экономическая целесообразность предлагаемого устройства определяется тем, что обеспечивается высокая точность работы не только при изменении внешних возмущений, но и при изменениях скорости хода. Это, в свою очередь, позволяет расширить диапазон условий эксплуатации технических средств суц,ов. Кроме того, использование предлагаемого устройства повышает универсальность алгоритмов управления успокоителями качки для широкого класса судов с неограниченным районом плавания. Применение устройства снижает амплитуды остаточной качки на различных скоростях хода, что является необходимым требованием при эксплуатации судна в условиях морского волнения.
Формула изобретения
Устройство для управления успокоителем качки судов, содержащее формирователь сигнала управления, связанный через операционный усилитель с ограничением со входом блока умножения, к другому входу которого подключен выход функционального преобразователя сигнала датчика скорости, и подключенные к выходу блока умножения следящие приводы, кинематически связанные с датчиком положительной обратной связи, отличающееся тем, что, с целью повышения точности устройства, оно содержит фазочувствительньш выпрямитель и дополнительный блок умножения, к входам которого подключены соответственно выход функционального преобразователя сигнала датчика скорости и через фазочувствительный вьшрямитель-датчик положительной обратной связи, а выход дополнительного блока умножения подключен к входу операционного усилителя с ограничением.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления успоко-иТЕлЕМ КАчКи СудОВ | 1979 |
|
SU796069A2 |
| Устройство для управления успокоителем качки судов | 1981 |
|
SU971699A2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ УСПОКОИТЕЛЕМ КАЧКИ СУДНА | 1991 |
|
RU2013295C1 |
| Устройство для управления бортовыми рулями успокоителя качки судна | 1983 |
|
SU1147636A1 |
| Устройство для управления успокоителем качки судна | 1978 |
|
SU694418A1 |
| Система управления бортовыми рулями успокоителя качки судна | 1976 |
|
SU597591A1 |
| Устройство управления успокоителем качки судов | 1973 |
|
SU481496A1 |
| Устройство для управления успокоителем качки судна | 1977 |
|
SU679473A1 |
| Устройство для формирования сигнала управления бортовыми рулями успокоителя качки судна | 1973 |
|
SU484123A1 |
| Устройство для формирования сигнала управления бортовыми рулями успокоителя качки судна | 1980 |
|
SU897631A2 |