Изобретение относится к автоматическим устройствал для управления процессом перемотки ленточных материалов и может быть использовано в технологических процессах различных отраслей прО1«ьи1шенности, гле необходш/1о при намотке ленточных материалов производить укладку лент в рулон с выровненным торцом.
Известно устройство для автоматического управления укладкой ленточных материалов, содержащее двигатель перемещения каретки с рулоном, электрически связанный с выходом преобразователя, датчики положения края ленты и положения каретки, подк.гао.ченные к первому и второму входам регулятора положения каретки 1.
Недостатком.известного устройства является низкое качество укладки ленточных материалов, определяемое влиянием упругих свойств материала, моментом инерции вращающегося рулона, изменением линейной скорости перемотки и других факторов на динамику работы устройства.
Трелью изобретенил является повыиение качества укладки ленточных материалов при их намотке.
Поставленная цель достигается тем, что устройство для автоматического управления укладкой ленточных
с материалов, содержащее двигатель перемещения каретки с рулоном, электрически связанный с выходом преобразователя, датчики положения края материала и положения каретки, подклю Q ченные к первому и второ входам
регулятора положения каретки, имеет датчики радиуса рулона, тока преобразователя и скорости перемещения каретки, управляющий блок, 3апоминаю 5 щий блок, блок выделения модуля скорости, квадратор и блок коррекции,
причем выход датчика радиуса рулона подключен к третьему входу регулятора положения каретки и через квадратор - к nepBOfiy входу блока коррекции, второй вход которого посредством блока выделения модуля скорости связан с выходом датчика скорости перемещения каретки, а третий вход
25 соединен с выходом датчика тока преобразователя, первый вход управляющего блока подключен к выходу регулятора положения каретки, второй вход связан через запоминающее устройство
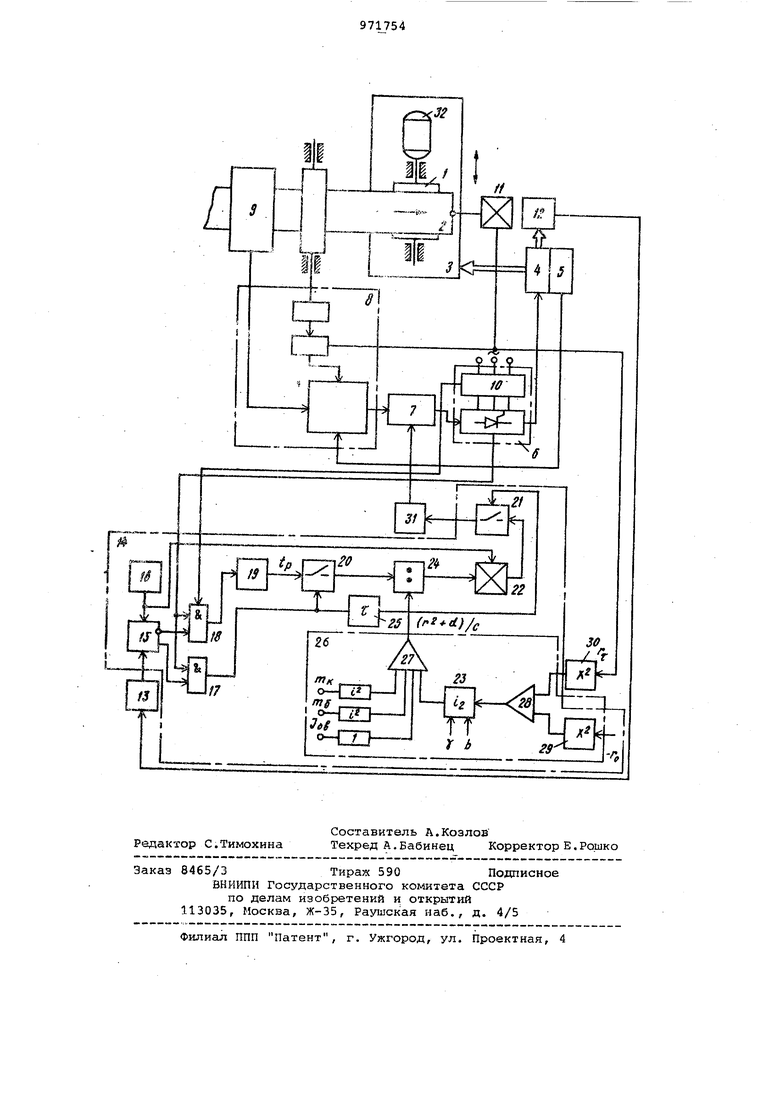
30 с выходом блока коррекции, а выход управляющего блока соединен со входом преобразователя. На чертеже показана блок-схема предлагаемого устройства. Устройство содержит барабан 1, наматываемую ленту 2, каретку 3, двигатель 4 перемещения каретки, дат чик 5 положения каретки, преобразователь б, управля оа1ий блок 7, регуля тор 8 положения каретки, д 1тчик 9 положения края материала, датчик 10 тока преобразователя, датчик 11 радиуса рулона, датчик 12 скорости перемещения каретки, блок 13 выделе ния модуля скорости, блок 14 коррек ;ии, компаратор 15, задатчик 16 ско рости, элементы И 17 и 18, блок 19 отсчета времени, ключи 20 и 21, бло ки 22 и 23 умножения, блок 24 деления, элемент 25 задержки, блок 26 уставки коэффициентов, сумматоры 27 и 28, блок 29 масштабирования, квадратор 30,.запоминающий блок 31, двигатель 32 привода барабана. Устройство работает следуощим образом. После заправки ленты 2 в лентопротяжный тракт в режиме подготовка осуществляется установка ленты 2 в исходное положение. Каретка 3 и датчик 9 положения края ленты автоматически устанавливаются з исходное положение. При заданной скорости двигатель 32 привода барабан приводит во вращение барабан 1 и лен та 2 начинает наматываться в рулон. При измеке.;,;ки положения края ленты, т.е. ее боковом смещении, с датчика 9 положения края ленты на первый вход-регулятора 8 положения каретки подается сигнал. Одновременно на вто рой и третий входы регулятора 8 положения каретки поступают сигналы с яат«;ика 5 положения каретки и датчика 12 скорости перемещения каретки. С учетом расстояния между датчиком 9 положения края ленты и линии касанкз ленты 2 с рулоном, а также линейной скорости ленты 2 и диаметра рулона, регулятор 8 положения кареткк обрабатывает сигнал, который поступает на первый вход управлягацего блока 7. Двигатель 4 перемещения каретки 3 в данном устройстве работает в реверсивном режиме, что приводит к неравномерности скорости перемещения каретки 3. Сигнал с датчика 12 скорости перемещения каретки подается через блок 13 выделения модуля скорости на первый вход компаратора 15, на второй вход которого с .зс-удагчкка 16 скорости поступает сигн1дл заданного значения скорости WK . С инвертирующех-о и неинвертируквдего выходов компаратора 15 сигна.пы рассогласования подаются на вто рые входы элементов И 17 и 18, на первые входы которых поступает сигнал с датчика 10 тока преобразователя при достижении определенного значения пускового тока, В период разгона двигателя 4 перемещения каретки сигналом с инвертирующего выхода компаратора 15 посредством элемента И 18 включается блок 19 отсчета времени. По окончании разгона tp компаратор .15 переключается, включается ключ 20 и с задержкой времени f - ключ 21. Одновременно олгкал с датчика 11 радиуса рулона черагэ квадратор ЗС поступает на первый вход блока 26 уставки коэффициентов: Го - радиус барабана, т и - масса соответственно каретки и барабана, f- плотность рулона, b иирина ленты, tlg - момент инерции двигателя. С блока 29 масштабирования, сумматора 28, блока 23 умножения и сумматора 27 на выходе блока 26 уставки коэффициентов фор ируется сигнал, пропорциональный квадрату радиуса рулона, который поступает на один из входов блока 24 деления. На второй вход блока 24 деления подается сигнал, пропорциональный времени tp. С выхода блока 24 деления выходной сигнал корректируется с помощью блока 22 умножения на величину уставки заданной скорости w), и через ключ 21 запоминается в запоминающем блоке 31, выход которого подключен ко второму входу управляющего блока 7. Таким образом, с выхода управляющего блока 7 на вход преобразователя б подается сигнал, скорректированный по расстоянию от датчика положения края материала 10 и величины смещения края материала, а также согласно в соответствии с блоком коррекции выраяенип ii-k .)а;к .. . Ct р -коэффициент преобразования;-квадрат текущего радиуса рулона; С, ti,к. постоянные коэффициенты для конкретного процесса перемотки; tp - время разгона двигателя каретки до скорости tUit при постоянном пусковом токе. Применение предлагаемого устройства позволяет повысить качество укладки ленточных материалов при их намотке в рулон. Формула изобретения Устройство для автоматического управления укладкой ленточных материалов, содержаицее двигатель перемещения каретки с рулоном, электрически связанный с выходом преобразователя , датчики положения края ленты и положения каретки, подключенные к первому и второму входам регулятора положения каретки, отличающееся тем, что, с целью повышения качества укладки, оно имеет датчики радиуса рулона, тока преобразователя и скорости перемещения каретки, управляющий блок, Запоминающий блок, блок выделения модуля скорости, квадратор и блок коррекции, причем выход датчика радиуса рулона подключен третьему входу регулятора положения каретки и через квадратор - к первому входу блока коррекции, второй вход которого посредством блока.выделения модуля скорости связан с выходом датчика скорости перемещения каретки, а третий вход соединен с выходом датчика тока преобразователя, первый вход управляющего блока подключен к выходу регулятора положения каретки, второй вход связан через запоминающий блок с выходом блока коррекции, а выход управляющего блока соединен с входом преобразователя. Источники информации, принятые во внимание при экспертизе 1. Патент ФРГ 1219576, кл. Н 02 Р 5/40, 1961.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления аккумуля-TOPOM пОлОСы | 1979 |
|
SU814499A1 |
| Устройство для управления агрегатом перемотки рулонов | 1977 |
|
SU733751A1 |
| Устройство для определения момента начала торможения агрегата обработки рулонного проката | 1980 |
|
SU933144A1 |
| Цифроаналоговое устройство управления летучими ножницами с механизмом выравнивания скоростей | 1990 |
|
SU1712078A1 |
| Электропривод осевой намотки | 1989 |
|
SU1737688A1 |
| Устройство для защиты электродвигателя от перегрева | 1986 |
|
SU1374325A1 |
| Устройство управления летучими ножницами, снабженными механизмом выравнивания скоростей | 1990 |
|
SU1712080A1 |
| Устройство для регулирования натяжения полосы на моталке листопрокатного стана | 1982 |
|
SU1041188A1 |
| Устройство для регулирования энергоустановки теплоэлектрического транспортного средства | 1983 |
|
SU1150112A1 |
| Устройство для регулирования натяжения перематываемого материала | 1986 |
|
SU1341139A1 |