(54) СИСТЕМА РЕГУЛИРОВАНИЯ НАТЯЖЕНИЯ К УСТРОЙСТВУ ДЛЯ НАМОТКИ ДЛИННОМЕРНОГО МАТЕРИАЛА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования натяжения ленты при мокрой намотке | 1980 |
|
SU979143A1 |
| Система автоматического регулирования технологических параметров при намотке изделий из композиционных материалов | 1982 |
|
SU1075241A1 |
| Регулятор натяжения | 1981 |
|
SU979251A1 |
| Устройство для натяжения длинномерных материалов при перемотке | 1990 |
|
SU1744025A1 |
| Устройство для регулирования натяжения ленточного материала | 1983 |
|
SU1148829A1 |
| Регулятор натяжения | 1981 |
|
SU956405A1 |
| Устройство для регулирования натяжения ленточного материала | 1982 |
|
SU1101400A1 |
| Устройство для регулирования натяжения проволоки на механизме бандажирования трубопровода | 1986 |
|
SU1406109A1 |
| Устройство для регулирования натяжения ленточного материала | 1981 |
|
SU996314A1 |
| Система автоматического регулирования технологических параметров при намотке изделий из композиционных материалов | 1984 |
|
SU1198482A2 |
Изобретение относится к регулированию технологических процессов, кок- кретнее к регуляторам натяжения.
Известна система регулирования натяжения к устройству для намотки длинномерного материала, содержащая . датчик натяжения, элемент сравнения, первый вход которого подключен к задатчику натяжения, а выход соединен с блоком управления электродвигателем, кинематически связанным с исполнительным механизмом Cl.
Однако известная система обладает невысокой точностью регулирования величины натяжения, так как регулирование производится по величине натяжения, снимаемого на участке до направляющего ролика-укладчика, и при этом не учитывается влияние изменений угла охвата наматывае1 1М материалом направляющего ролика-укладчика на величину натяжения, с которым осуществляется намотка, что приводит к наличию систематической погрешности при определении фактического натяжения.
Цель изобретения - повышение точности регулирования.
Поставленная цель достигается тем, что система регулирования натяжения
к устройству для намотки длинномерного материала, содержащая датчик натяжения, элемент сравнения, первый вход которого подключен к задатчику натяжения, а выход соединен с блоком управления электродвигателем, кинематически связанным с исполнительным механизмом, имеет сумматор и датчик момента, кинематически связанный с
10 направляющим роликом-укладчиком, при этом датчики натяжения и момента через сумматор соединены с вторым входом .элемента сравнения.
15
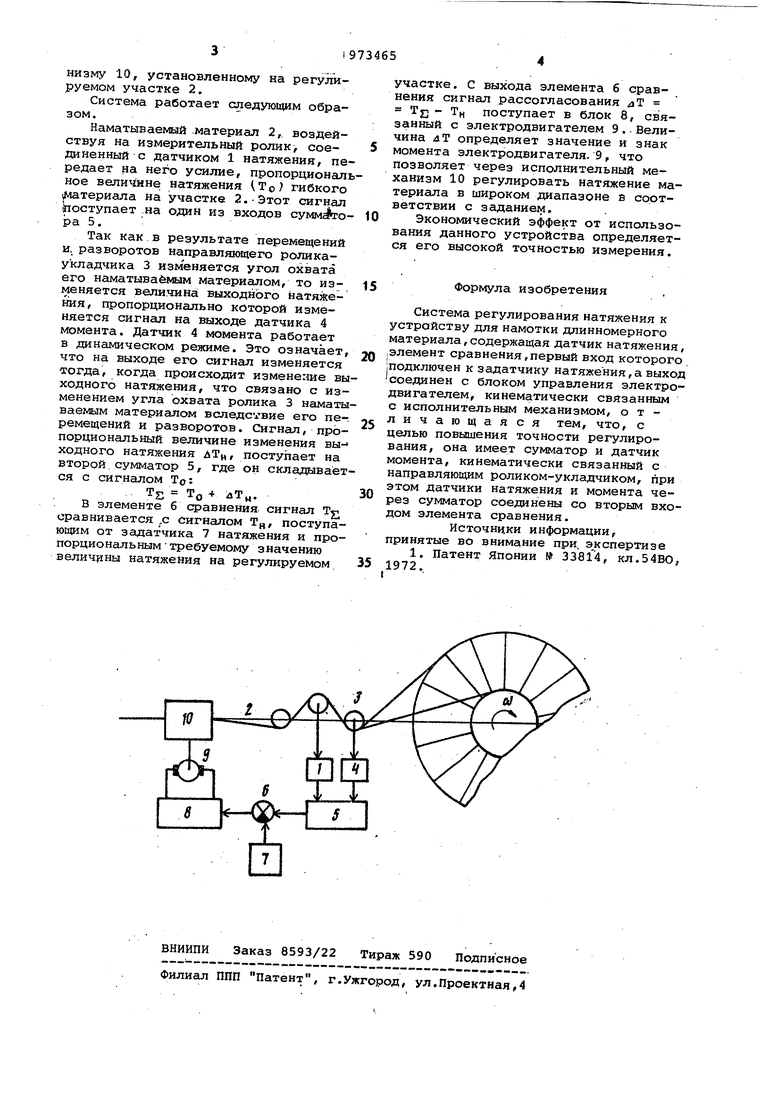
На чертеже представлена блок-схема системы.Система содержит датчик 1 натяжения, связанный с измерительным роликом, расположенным на регулируемом
20 участке 2, подключенный к направляющему ролику-укладчику 3 датчик 4 момента, соединенный, как и датчик натяжения,- с сумматором 5. Сумматор 5 подключен в свою очередь к одному
25 из входов элемента б сравнения, ко второму входу которого подсоединен эадашчик 7 натяжения. Выход элемента б сравнения связан с блоком 8 управления, который через электродвигатель
30 9 подключен к исполнительному механизму 10, установленному на регулируемом участке 2.
Система работает слелующим образом.
Наматываемый .материал 2,. воздействуя на измерительный ролик соединенный с датчиком 1 натяжения, передает на него усилие, пропорциональное величине натяжения (То гибкого 1Материала на участке 2.-Этот сигнал Ьоступает на один из входов суммжора 5.
Так как в результате перемещений и. разворотов направляющего роликаукладчика 3 излтаняется угол охвата его наматываемым материалом, то изменяется величина; выходного натяжения, пропорционально которой изменяется сигнал на выходе датчика 4 момента. Датчик 4 момента работает в динамическом режиме. Это означает, что на выходе его сигнал изменяется тогда, когда происходит изменение выходного натяжения, что связано с изменением угла охвата ролика 3 наматываемым материалом вследсчвие его перемещений и разворотов. Сигнал, пропорциональный величине изменения выходного натяжения ЛТц, поступает на второй.сумматор 5, где он складывается с сигналом TO:
TS TO 4 йТ„.
в элементе б сравнения сигнал У сравнивается ,с сигналом Тц, поступающим от задатчика 7 натяжения и пропорциональным требуемому значению величины натяжения на регулируемом
участке. С выхода элемента б сравнения сигнал рассогласования лТ Tjn - TH поступает в блок 8, связанный с электродвигателем 9..Величина 4Т определяет значение и знак момента электродвигателя. 9, что позволяет через исполнительный механизм 10 регулировать натяжение материала в широком диапазоне в соответствии с заданием.
Экономический зффект от использования данного устройства определяется его высокой точностью измерения.
Формула изобретения
Система регулирования натяжения к устройству для намотки длинномерного материала, содержащая датчик натяжения, .элемент сравнения,первый вход которого подключен к задатчику натяжения,а выход соединен с блоком управления электродвигателем, кинематически связанным с исполнительным механизмом, отличающаяся тем, что, с целью повышения точности регулирования, она имеет сумматор и датчик момента, кинематически связанный с направляющим роликом-укладчиком, при этом датчики натяжения и момента через сумматор соединены со вторым входом элемента сравнения.
Источники информации, принятые во внимание при. экспертизе
