(З) РЕГУЛЯТОР НАТЯЖЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕГУЛЯТОР НАТЯЖЕНИЯ | 1999 |
|
RU2142400C1 |
| Система регулирования натяжения к устройству для намотки длинномерного материала | 1981 |
|
SU973465A1 |
| Устройство для регулирования натяжения ленты при мокрой намотке | 1980 |
|
SU979143A1 |
| Устройство для регулирования натяжения ленточного материала | 1982 |
|
SU1101400A1 |
| Регулятор натяжения | 1981 |
|
SU956405A1 |
| Устройство для регулирования натяжения ленточного материала | 1983 |
|
SU1148829A1 |
| Система автоматического регулирования технологических параметров при намотке изделий из композиционных материалов | 1982 |
|
SU1075241A1 |
| Система автоматического регулирования технологических параметров при намотке изделий из композиционных материалов | 1984 |
|
SU1198482A2 |
| Устройство для регулирования натяжения ленточного материала | 1981 |
|
SU996314A1 |
| СТАНОК НАМОТОЧНЫЙ | 2015 |
|
RU2615478C1 |
1
Изобретение относится к регуляторам натяжения, конкретнее, к регулят торам натяжения длинномерных материалов при автоматизации процесса изготовления изделий из композиционных материалов методом намоток, в том числе в химическом машиностроении при изготовлении емкостей методом намотки пропитанного связующим ленточного материала на уделенную вращающуюся jo оправку переменного радиуса.
Известен регулятор натяжения, содержащий блок управления электродвигателем с исполнительным механизмом, датчики натяжения, установленные со- 5 ответственно до и после исполнительного механизма, элемент сравнения, входы которого соответственно подключены к датчику натяжения, установленному после исполнительного ме- 2о ханизма, и к задатчику натяжения, и датчик скорости материала l.
Недостатком известного регулятора является невысокая точность регулирования натяжения, так как при намотке на оправку переменного радиуса наличие задатчика скорости протяжки материала на регулируемом участке (т.е. стремление создать постоянную скорость движения материала) приводит к появлению в тракте протяжки после опорного механизма петель и рывков ленты при переходе точки контакта с цилиндрической части на днище и обратно, что вызовет резкое изменение величины регулируемого натяжения, которого исполнительный механизм, поставленный между датчиками натяжения, ликвидировать не сможет, так как принцип работы его основывается на предположении постоянства заданной скорости протяжки, что в реальной системе не наблюдается ввиду того, что скорость протяжки - существенно переменная величина, определяемая положением точки контакта.
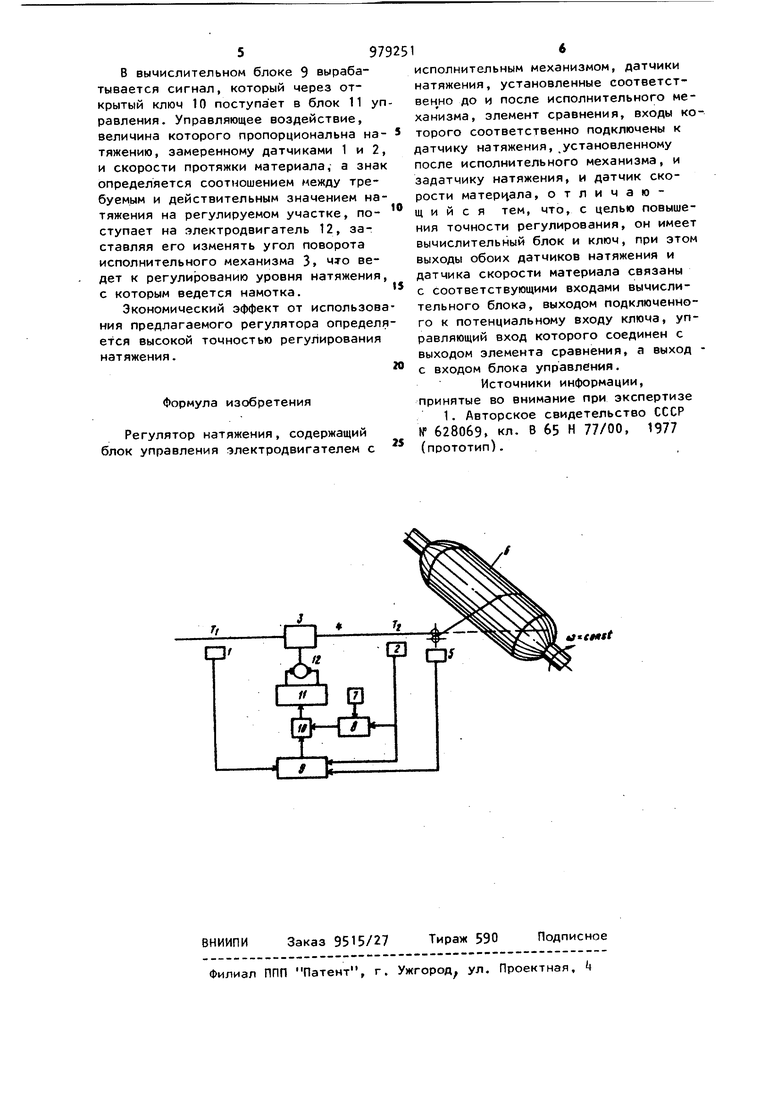
Цель изобретения - повышение точности регулирования натяжения. Поставленная цель достигается благодаря тому, что регулятор натяжения содержащий блок управления электродвигателем с исполнительным механизмом, датчики натяжения, установленные соответственно до и после исполнительного механизма, элемент сравнения, входы которого соответственно подключены к датчику натяжения, установленному после исполнительного механизма, и к задатчику натяжения, и датчик скорости материала, имеет вычислительный блок и ключ, при этом выходы обоих датчиков натяжения и датчика скорости материала связаны с соответствующими входами вычислитель ного блока, выходом подключенного к потенциальному входу ключа, управляю щий вход которого соединен с выходом элемента сравнения, а выход - с входом блока управления. На чертеже представлена структурная схема регулятора. Датчики 1 и 2 натяжения -гибкого материала установлены соответственно до и после исполнительного механизма 3. На участке регулирования натяжения установлен датчик 5 скорости материала, наматываемого на оправку 6. Выходы датчика 2 и задатчика 7 натяжения связаны с входами элемента 8 сравнения. Входывычислительного бло ка 9 соединены с входами датчиков 1, 2 и 5, а его выход через ключ 10 под ключен к блоку 11 управления электро двигателем 12, вал которого соединен с исполнительным механизмом 3. Кроме того, выходэлемента 8 сравнения связан с управляющим входом ключа 10 Исполнительный механизм 3 регулятора натяжения представляет собой проточенный по образующей вал, через который пропускается гибкий материал Возможность регулирования величины натяжения обусловлена наличием функциональной связи между углом поворота исполнительного механизма, обеспе чивающего требуемый угол охвата мате риалом поверхности исполнительного механизма, и величиной натяжения, с которым осуществляется намотка. Изме нение угла охвата осуществляется за счет принудительного поворота исполнительного механизма электродвигателеи 12 путем изменения значения и ка момента электродвигателя, управляемого по цепи якоря. Вычислительный блок 9 производит расчет функции, связывающей угол пота исполнительного механизма со остью движения укладываемого матеа и его натяжением v.(T,-T,)|-(ri-T;) I 2S R-2R- J соответственно коэффициент Пуассона и модуль упругости для наматываембго материала; радиус исполнительного механизма; коэффициент трения гибкого материала с поверхностью исполнительного механизма; площадь поперечного сечения нерастянутого материала; скорость движения материала в тракте; 1 соответственно натяжение и скорость изменения натяжения на участках материала до и после исполнительного механизма;скорость изменения yi- ла охвата гибким материалом поверхности исполнительного механизма , определяемая скоростью поворота исполнительного механизма. Регулятор работает следующим обра, С датчика 2 натяжения, установлено на регулируемом участке k, сиг, пропорциональный натяжению T.j, тупает в элемент 8 сравнения, где внивается с сигналом, пропорциоьным требуемому значениюнатяжения и поступающим от задатчика 7 натя Tjj, то в элементе 8 ия. Если Тл внения вырабатывается сигнал, завающий ключ 10, и угол поворота олнительного механизма 3 (а оледоельно, и угол охвата материалом ерхности исполнительного механизне меняется. При T 1 TO с элемента 8 сравнения ается сигнал, открывающий ключ 10 и несущий информацию о том, увеличивать или уменьшать угол охвата материалом поверхности исполнительного механиз (при Tj Т, - уменьшать. - увеличивать). при Т -: TO
В вычислительном блоке 9 вырабатывается сигнал, который через открытый ключ 10 поступает в блок 11 управления. Управляющее воздействие, величина которого пропорциональна натяжению, замеренному датчиками 1 и 2, и скорости протяжки материала, а знак определяется соотношением между требуемым и действительным значением натяжения на регулируемом участке, по- ступает на электродвигатель 12, заставляя его изменять угол поворота исполнительного механизма 3, что ведет к регули{зовани10 уровня натяжения, с которым ведется намотка.
Экономический эффект от использования предлагаемого регулятора определяется высокой точностью регулирования
натяжения.
Формула изобретения
Регулятор натяжения, содержащий блок управления электродвигателем с
исполнительным механизмом, датчики натяжения, установленные соответствен но до и после исполнительного механизма, элемент сравнения, входы которого соответственно подключены к датчику натяжения, установленному после исполнительного механизма, и задатчику натяжения, и датчик скорости матер1 ала, отличающийся тем, что, с целью повышения точности регулирования, он имеет вычислительный блок и ключ, при этом выходы обоих датчиков натяжения и датчика скорости материала связаны с соответствующими входами вычислительного блока, выходом подключенного к потенциальному входу ключа, управляющий вход которого соединен с выходом элемента сравнения, а выход п с входом блока управления.
Источники информации, принятые во внимание при экспертизе
