(54) УСТРОЙСТВО для КОНТРОЛЯ ДЕФОРМАЦИИ ПРУЖИН
| название | год | авторы | номер документа |
|---|---|---|---|
| КОЛЕБАТЕЛЬНЫЙ СТРУКТУРОМЕТР | 2016 |
|
RU2625535C1 |
| ВИБРАЦИОННЫЙ РЕОМЕТР | 2015 |
|
RU2608574C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МАССЫ ОБЪЕКТА | 1993 |
|
RU2075732C1 |
| КОЛЕБАТЕЛЬНЫЙ СДВИГОМЕТР | 2011 |
|
RU2454655C1 |
| Устройство для контроля размерных параметров цепей | 1984 |
|
SU1165872A1 |
| Способ контроля отклонения от прямолинейности и устройство для его осуществления | 1980 |
|
SU968585A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕХАНИЧЕСКИХ СВОЙСТВ БИОЛОГИЧЕСКИХ ТКАНЕЙ | 1993 |
|
RU2061405C1 |
| Полуавтомат для сортировки пружин сжатия | 1976 |
|
SU665957A1 |
| Установка для аргонодуговой сварки поворотных стыков труб неплавящимся электродом с подачей присадочной проволоки | 1990 |
|
SU1776528A1 |
| Устройство для измерения параметров внутренних сфер | 1989 |
|
SU1698620A1 |
Изобретение относится к машиностроению и может быть использовано для контроля деформации пружин.
Наиболее близким к изобретению по технической сущности и достигаемому эффекту является устройство для контроля деформации пружин, содержащее корпус с базовой плоскостью, закрепленные на ней парашлельно Друг другу фиксирующий штифт и измеритель линейных перемещений, установленный в корпусе механизм тарированного нагружения с нагружающим штоком, расположенным соосно со штифтом, закрепленный на конце штокаперпендикулярно его оси кронштейн с отверстием на конце, установленная в корпусе с возможностью осевого перемещения и расположенная в отверстии кронштейна штанга с кольцевой выточкой в средней части, закрепленный на одном из концов штанги щуп, взаимодействукиций с измерителем линейных перемещений и закрепленный на кронытейне механизм перемещения штанги LI.
В данном устройстве механизм перемещения штанги выполнен в виде хомута, жество соединздющего штангу с кронштейном, что приводит к необходимости визуального контроля момента контакта нагружающего штока с торцом контролируемой пружины, поскольку контролируемые пружины характеризуются отклонением размеров по высоте. Это приводит к субъективным погрешностям в определении начала отсчета и к необходимости запоминания
to максимального показания измерителя линейных перемещения с целью последующих вычислений величины деформации контролируемой пружины, что приводит к невысокой точности и производительности контроля.
15
Цель изобретения - повышение точности и производительности контроля.
Поставленная цель достигается тем, что устройство для контроля деформации пружин, содержащее корпус с ба20зовой плоскостью, закрепленные на ней параллельно друг другу фиксирующий штифт и измеритель линейных перемещений, установленный в корпусе механизм тарированного нагружения
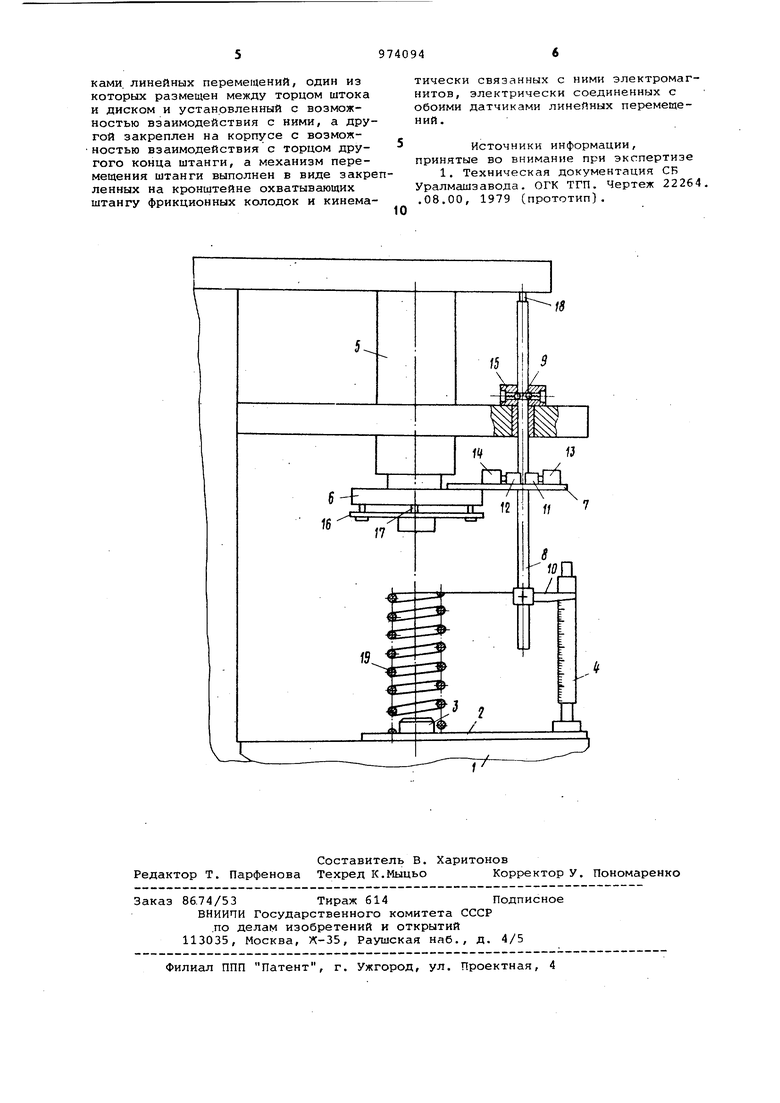
25 с нагружающим штоком, расположенным соосно со штифтом, закрепленный на конце штока перпендикулярно его оси кронш рейн с отверстием на конце, установленная в корпусе с возмож30ностью осевого перемещения и расположенная в отверстии кронштейна штанга с кольцевой выточкой в средней части, закрепленный на одном из концов штанги щуп, взаимодействующий с измерителем линейных перемещений, и закрепленный на кронштейне механизм перемещения штанги, снаб жено шариковым фиксатором, закрепленным на корпусе с возможностью взаимодействия с кольцевой выточкой штанги, закрепленным на торце штока подпружиненным относительно него диском, и двумя датчиками линейных перемещений, один из которых размещен между торцом штока и диском и установленный с возможностью вэаимодействия с ними, а другой закреплен на корпусе с возможностью взаимодействия с торцом другого конца штанги, а механизм перемещения штанги выполнен в виде закрепленных на кронштейне охватывающих штангу фрикционных колодок и кинематически связанных с ними электромагнитов, электрически соединенных с обоими датчиками линейных перемещений. На чертеже показана схема устройства для контроля деформации пружин Устройство содержит корпус 1 с ба зовой плоскостью 2, фиксирующий штиф 3, измеритель 4 линейных перемещений механизм 5 тарированного нагружения с нагружающим штоком б, закрепленный на его конце кронштейн 7, установленная в корпусе 1 с возможностью осевого перемещения и расположеннат в отверстии кронштейна 7 штанга 8 с кольцевой выточкой 9, закрепленный на штанге щуп 10, взаимодействующий с измерителем 4 линейных перемещений закрепленный на кронштейне 7 механиз перемещения штанги, выполненный в ви де фрикционных колодок 11 и 12, охва тывающих штангу 8, и кинематически связанных с ними электромагнитов 13 и 14, шариковый фиксатор 15, взаи модействующий с кольцевой выточкой 9 для размещения щупа 10 в п ложении, соответствующем началу отсчета измерителя 4 линейных перемещений, закрепленный на торце штока б, подпружиненный относительно нехо диск 16, размещенный между штоком б и диском 16 датчик 17 линейных перемещений и закрепленный на корпусе 1 датчик 18 линейных перемещений. Устройство работает следующим образом. В исходном состоянии контролируемую пружину 19 устанавливают торцом на базовую плоскость 2 с фиксацией на штифте 3, нагружающий шток б находится в верхнем положении, штанга 8 контактирует своим верхним торцом с датчиком 18, что обеспечивает обесточивание электромагнитов 13 и 14, разведение колодок 11 и 12 и свободное размещение штанги 8 относительно этих колодок. При этом шарики фиксатора 15 входят в кольцевую выточку 9 штанги 8 и обеспечивают нулевое показание измерителя 4 линейных перемещений. При контроле нагружающий шток б перемещается вместе с кронштейном 7 в направлении контролируемой пружины 19. В момент касания диска 16 с верхним торцом контролируемой пружины 19 датчик 17 вызывает срабатывание электромагнитов 13 и 14, которые зажимают с помощью колодок 11 и 12 штангу 8 и перемещают ее вместе со штоком б, перемьщая щуп 10 относительно измерител5. 4 линейных еремещений до момента остановки штока б, когда снимают показания измерителя 4. После снятия показания шток б вместе со штангой 8 перемещается вверх. В момент касания торца штанги 8 с датчиком 18, последний обеспечивает отключение электромагнитов 13 и 14 и разведение колодок 11 и 12, а штанга 8 удерживается в этом положении фиксатором 15. Использование предлагаемого устройства по сравнению с известным устройством обеспечивает повышение точности и производительности контроля за счет учета разноразмерности контролируемых пружин по высоте и исключения ручных операций при контроле и обработке показаний измерителя линейных перемещений. Формула изобретения Устройство для контроля деформации пружин, сожержащее корпус с базовой плоскостью, закрепленные на ней параллельно друг другу фиксирующий штифт и измеритель линейных перемещений, установленный в корпусе механизм тарированного нагружения с нагружающим штоком, расположенный соосно с штифтом, закрепленный на конце штока перпендикулярно оси кронштейн с отверстием на конце, установленная в корпусе с возможностью осевого перемещения и расположенная в отверстии кронштейна штанга с кольцевой выточкой в средней части, закрепленный на одном из концов штанги щуп, взаимодействующий с измери- , телем линейных перемещений и закрепленный на кронштейне механизм перемещения штанги, отличающеес я тем, что, с целью повышения точности и производительности контроля, оно снабжено шариковым фиксатором, з,акрепленным на корпусе с возможностью взаимодействия с кольцевой выточкой штанги, закрепленным на торце штока, подпружиненным относительно него диском, и двумя датчиками линейных переметений, один из которых размещен между торцом штока и диском и установленный с возможностью взаимодействия с ними, а другой закреплен на корпусе с возмоя костью взаимодействия с торцом другого конца штанги, а механизм перемещения штанги выполнен в виде закреленных на кронштейне охватывающих штангу фрикционных колодок и кинематически связанных с ними электромагнитов, электрически соединенных с обоими датчиками линейных перемещений.
Источники информации, принятые во внимание при экспертизе
