(54) ПОЛУАВТОМАТ ДЛЯ СОРТИРОВКЛ ПРУЖИН СЖАТИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Полуавтомат для сортировки диафрагм по толщине | 1972 |
|
SU445483A1 |
| Устройство для контроля и сортировки линз | 1980 |
|
SU910231A1 |
| Полуавтомат для сборки секаторов | 1982 |
|
SU1144830A1 |
| Автомат для контроля и сортировки гнезд штепсельных разъемов | 1989 |
|
SU1743654A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПРУЖИН СЖАТИЯ | 1972 |
|
SU435871A1 |
| ПОЛУАВТОМАТ ДЛЯ КОНТРОЛЯ ПАРАМЕТРОВ ПРУЖИНСЖАТИЯ | 1972 |
|
SU328320A1 |
| АВТОМАТ ДЛЯ СБОРКИ | 1992 |
|
RU2005586C1 |
| Автомат для контроля и сортировки гнезд штепсельных разъемов | 1986 |
|
SU1342537A1 |
| Автомат для сборки пластинчатых магнитопроводов электрических машин | 1981 |
|
SU991553A1 |
| Установка для сортировки жиклеров карбюраторов | 1985 |
|
SU1291717A1 |
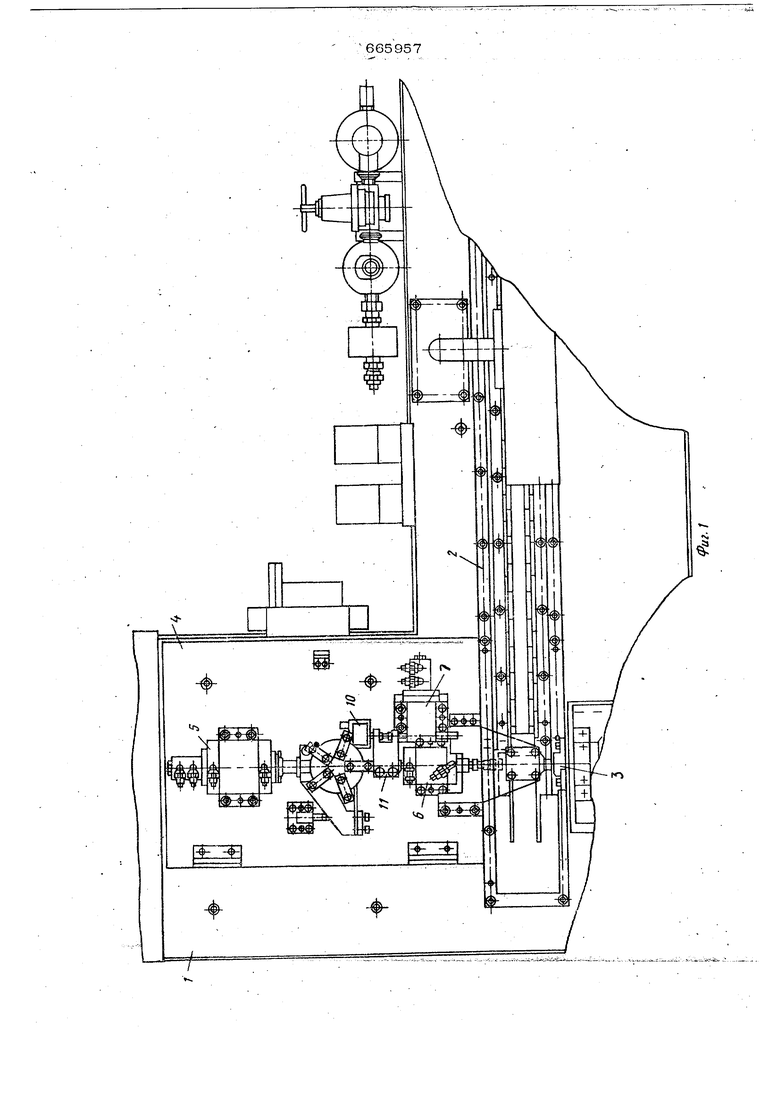
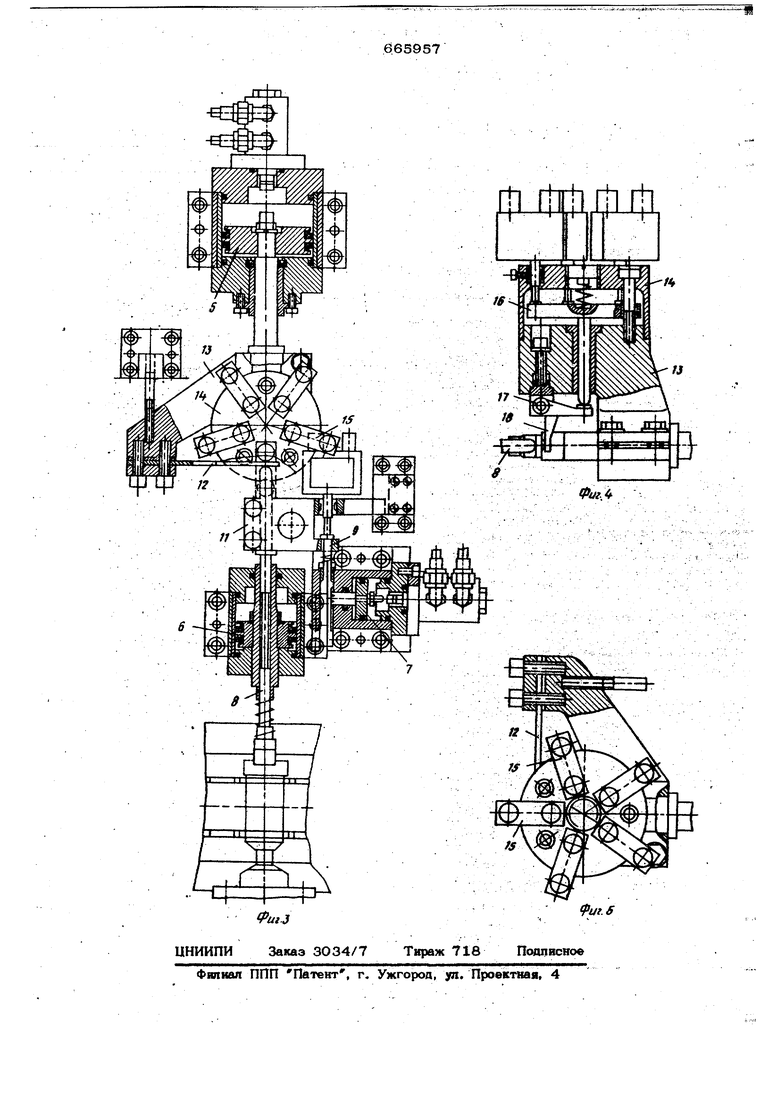
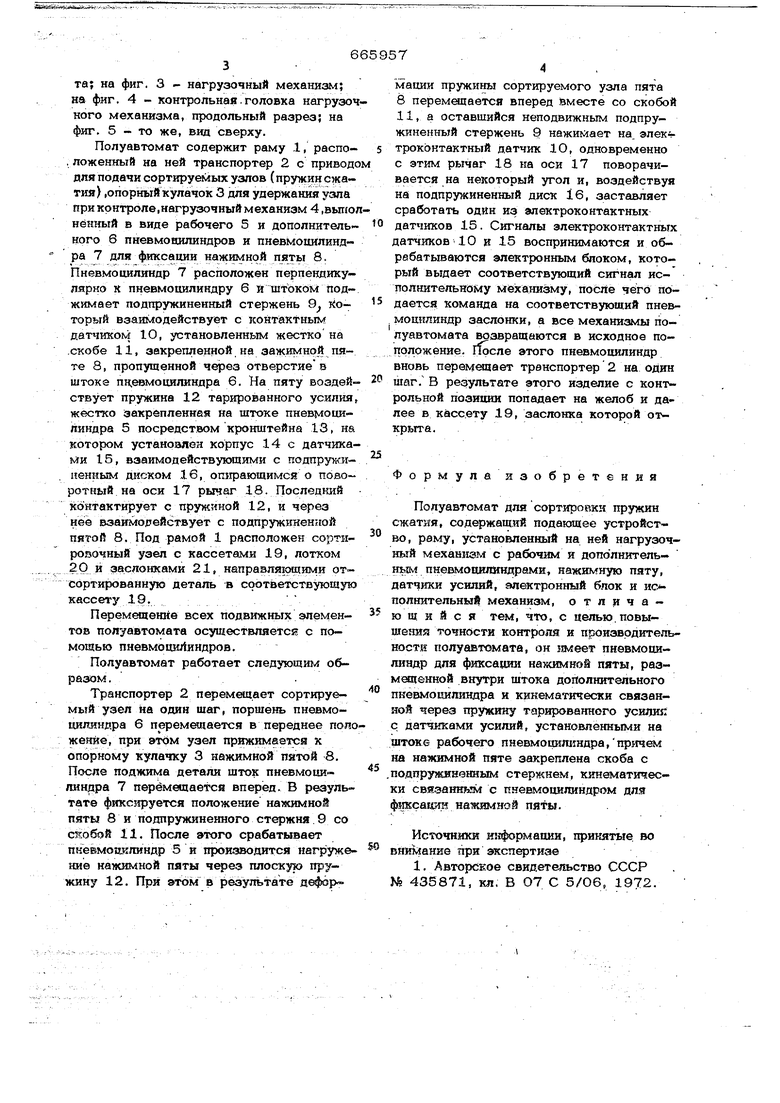
Изобретение относится к измерительно технике, а именно к устройствам для кон троля и сортировки пружин сжатия. Известно устройство для контроля и сортировки пружин сжатия, содержащее нагрузочный механизм с рабочим шшиндром и нажимной пятой, воздействующей на контролируемую пружину, датчик усилий, нагружаемый контролируемой пружиной, электронный блок, воспринимающий сигнал датчика, исполнительный управляемый электронным блоком, и дополнительный цилиндр, установленный на корпусе рабочего цилиндра нагрузочного мо ;анизма, шток которюго закреплей Жестко, корпус с возможностью перемещв НИ0 относительно штока, а шток дополнительноро цилиндра соединен с нажимной пятой ill. Известное устройство не обеспечивает высокой точности контроля заключенной в корпусе пружины. Цель изобретения - повьпиение точности контроля и производительности полуав Tqj4,aTa. Поставленная цель достигаетчзя тем, что предлагаемый полуавтомат, содержащий подающее устройство, раму, установленный на ней нагрузочный механизм с . рабочим и дополнительным пневмоцилиндрами, нажимную пяту, датчики усилий, электронный блок и исполнительный механизм, имеет пневмоцилиндр для фиксации нажимной пяты. „Последняя размещена внутри штока дополнительного пнэвмоцилиндра .и кинематически связана через пружину тарированного усигая с датчиками усилий, установленными на штоке рабочего пневмошшийдра. Причем на нажимной пяте закреплена скоба с подпружаневЙ1М стержно, кинематически связанньо с пневмойшшндром для фиксации нажимной пяты. На фиг. 1 схематично изображен описываемый полуавтомат, вид сверху; на фиг. 2 - сортировочный узел полуавтомата; на фиг. 3 - нагрузочный механизм; на фиг. 4 - контрольная.головка нагрузочного механизма, продольный разрез; на фиг. 5 - то же, вид сверху. Полуавтомат содержит раму 1, расположенный на ней транспортер 2 с приводом для подачи сортируемых узлов (пруцсин сжатия) ,опорный кулачок 3 для удержания узла при контроле,нагрузочный механизм 4 ,вьшолнённый в виде рабочего 5 и дополнитель- ного 6 пневмошшиндров и пневмоцилиндра 7 для фиксации нажимной пяты 8. Пневмоцилиндр 7 расположен перпендикулярно к пневмооилиндру 6 и штоком поджимает подпружиненный стержень 9 J(oторый взаимодействует с контактным датчиком 10, установленным жестко на .скобе 11, закрепленной на зажимной пяте 8, пропущенной через отверстие в штоке пн евмоцилиндра 6. На пяту воздей- 20 ствует пружина 12 тарированного усилия, жестко закрепленная на штоке пневмоциЛиндра 5 посредством кронштейна 13, на котором установлен корпус 14с датчика ми 15, взаимодействукйдими с подпружиненным диском 16, опирающимся о пово ротный на оси 17 рычаг 18. Последний контактирует с пружиной 12, и через нее взаимодействует с подпружиненной пятой 8. Под рамой 1 расположен сортировочный узел с кассетами 19, лотком 2О и заслонками 21, направляющими отсортированную деталь в соответствующую кассету 19. Перемещение всех подвижных элементов полуавтомата осуществляется с помощью пневмоциЛиндров. Полуавтомат работает следующтл образом . Транспортер 2 перемааает сортируемый узел на один щаг, поршень пневмоцилиндра 6 перемещается в переднее поло жение, при этом узел прижимается к опорному кулачку 3 нажимной пятой 8. После поджима детали шток пневмоиилиндра 7 перемещается вперед. В результате фиксгфуется положение нажимной пяты 8 и подпружиненного стержня 9 со скобой 11. После этого срабатывает пкевмоиклиндр 5 и производится нагружение нажимной пяты через плоскую пружину 12. При этом в результате д юр«6659575 15 мации пружины сортируемого узла пята 8 перемш1автся вперед вместе со скобой 11, а оставшийся неподвижным подпружиненный стержень 9 нажимает на. элек троконтактный датчик 10, одновременно с этим рычаг 18 на оси 17 поворачивается на некоторый угол и, воздействуя на подпружиненный диск 16, заставляет сработать один из эпектроконтактных датчиков 15. Сигналы злектроконтактных датчиков 10 и 15 воспринимаются и обрабатываются электронным блоком, который выдает соответствующий сигнал исполнительному Механизму, после чего подается команда на соответствующий пневмоцилиндр заслонки, а все механизмы полуавтомата возвращаются в исходное пополржение. После этого пневмоцилиндр вновь перемещает транспортер 2 на один шаг. В результате этого изделие с контрольной позишш попадает на желоб и далее в кассету 19, заслонка которой открыта. Формула изобретения Полуавтомат для сортировки пружин сжатия, содержащий подающее устройство, раму, установленный на ней нагрузочный маханием с рабочим и дополнительньгм пневмоцилиндрами, нажимную пяту, датчики усилий, электронный блок и ис полнительный механизм, о т л и ч а ю щ и и с я тем, что, с целью, повышения точности контроля и производительности полуавтомата, он jsMeer пневмоцилиндр для фиксации нажимной пяты, размэценной внутри штока дополнительного пкевмоцилиндра и кинематически связанной через пружину тарированного усидак с датчиками усилий, установленными на щтоке рабочего пневмоцилиндра,причем на нажимной пяте закреплена скоба с подпружиненным стержнем, кинематически связанным с пневмоцилиндром дл.я фиксация нажимной пяты. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР Н 435871, кл. В 07 С 5/06, 1972.
665957
