1. Область техники, к которой относится изобретение
Изобретение относится к гироскопической технике и может быть использовано для измерения абсолютной угловой скорости подвижных объектов - самолетов, ракет, морских судов.
Одной из важнейших задач, решаемых системами управления подвижными объектами, является измерение их абсолютной угловой скорости. Для этого используются датчики угловой скорости на базе роторных вибрационных гироскопов (РВГ). Совершенствование систем управления ставит перед разработчиками РВГ цель: повышение точности измерения абсолютной угловой скорости.
2. Уровень техники
Рассмотрим аналоги предлагаемого изобретения.
2.1. Библиографические данные аналогов изобретения
[1] G01С 19/02. Динамически настраиваемый гироскоп. Патент РФ №2158902 по заявке 99119848/28 от 13.09.1999 г. Авторы Плотников П.К., Кудрявцев М.В., Белоглазов В.И., Суховеев С.П., Скибин С.А., Скибина Ю.С., Щербаков А.В.
[2] Гироскопические системы, ч. 2 под редакцией Д.С. Пельпора. М.: Высшая школа, 1988, стр. 108.
2.2. В динамически настраиваемом гироскопе по патенту РФ №2158902 [1] общими признаками с предлагаемым изобретением являются двигатель с ротором в виде постоянного магнита, имеющего одну пару полюсов, и статором, содержащим трехфазную обмотку, а также маховик, соединенный с валом двигателя упругим элементом.
Недостатком этого аналога является низкая точность, обусловленная наличием возмущающих моментов сил, действующих на маховик со стороны упругого элемента.
Наиболее близким к заявляемому изобретению аналогом (прототипом) является РВГ [2], в котором общими признаками с предлагаемым изобретением являются: круглый маховик, укрепленный на валу двигателя с помощью упругого элемента, встроенный в маховик магнитоэлектрический датчик момента, содержащий четыре катушки, установленные на корпусе РВГ и помещенные в воздушный зазор магнитной системы маховика, измерение отклонения ротора относительно корпуса для определения абсолютной угловой скорости.
Недостатком этого аналога (прототипа) является высокий уровень погрешностей, обусловленных низкочастотными возмущающими моментами сил при угловом смещении маховика относительно корпуса и магнитных тяжений индуктивного датчика угла.
3 Раскрытие изобретения
3.1. Техническим результатом предлагаемого изобретения является повышение точности измерения абсолютной угловой скорости.
Технический результат достигается совокупностью существенных признаков:
- введением в РВГ сигнальных обмоток, расширяющих функциональное назначение датчика момента и приводного двигателя;
дифференцированием угла отклонения ротора роторного вибрационного гироскопа относительно корпуса;
- использованием сигналов, генерируемых в обмотках приводного двигателя роторного вибрационного гироскопа, для измерения абсолютной угловой скорости.
Сущность изобретения заключается в новой функции датчика момента, позволяющей измерять скорость колебаний маховика с двойной частотой вращения вала, а также в новой функции приводного двигателя, обеспечивающей формирование специальных сигналов двойной частоты вращения вала и предназначенной для выделения информации об абсолютной угловой скорости, свободной от низкочастотных помех. Данные функции осуществляются благодаря введению в конструкцию новых элементов - сигнальных обмоток датчика момента и двигателя, а также реализацией специального алгоритма обработки напряжений, генерируемых в этих элементах.
3.2. Заявляемое изобретение направлено на решение следующих трех задач:
- создание системы измерения скорости колебаний маховика на двойной частоте вращения вала;
- формирование двух квадратурных сигналов двойной частоты вращения вала;
- выделение информации об абсолютной угловой скорости основания, свободной от низкочастотных помех.
Для решения первой задачи в статорную часть магнитоэлектрического датчика момента введена система четырех сигнальных обмоток, использующих принцип дифференцирования для отделения полезного сигнала от низкочастотных помех.
Для решения второй задачи в двигатель РВГ введена сигнальная обмотка, причем частота сигнала, генерируемого в этой обмотке, преобразуется из одинарной в двойную частоту вращения вала по специальному алгоритму. В результате формируются два квадратурных опорных сигнала.
Для решения третьей задачи отфильтрованные от низкочастотных помех сигналы четырех сигнальных обмоток датчика момента преобразуются с использованием квадратурных опорных сигналов в информацию об абсолютной угловой скорости основания по специальному алгоритму.
Решение трех вышеуказанных задач обеспечивает повышение точности измерения абсолютной угловой скорости.
Существенные признаки, характеризующие предлагаемое изобретение и общие с прототипом [2] в части устройства: круглый маховик, магнитоэлектрический датчик момента, упругий элемент. Существенные признаки, характеризующие предлагаемое изобретение и общие с прототипом [2] в части способа: измерение отклонений ротора для определения абсолютной угловой скорости.
Существенные признаки, характеризующие предлагаемое изобретение и отличающиеся от прототипа в части устройства: введенные в статор датчика момента и статор приводного двигателя сигнальные обмотки. Существенные признаки, характеризующие предлагаемое изобретение и отличающиеся от прототипа в части способа: дифференцирование угла отклонения ротора.
4. Краткое описание чертежей
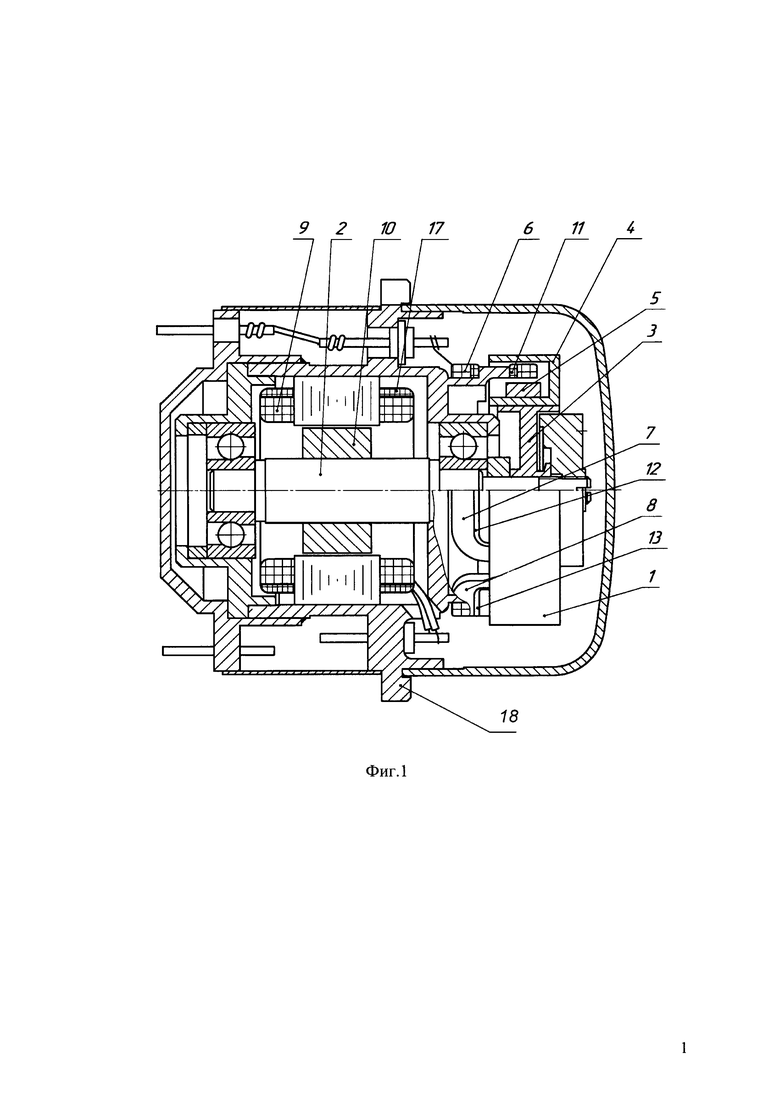
На фиг. 1 представлена конструкция заявляемого устройства.
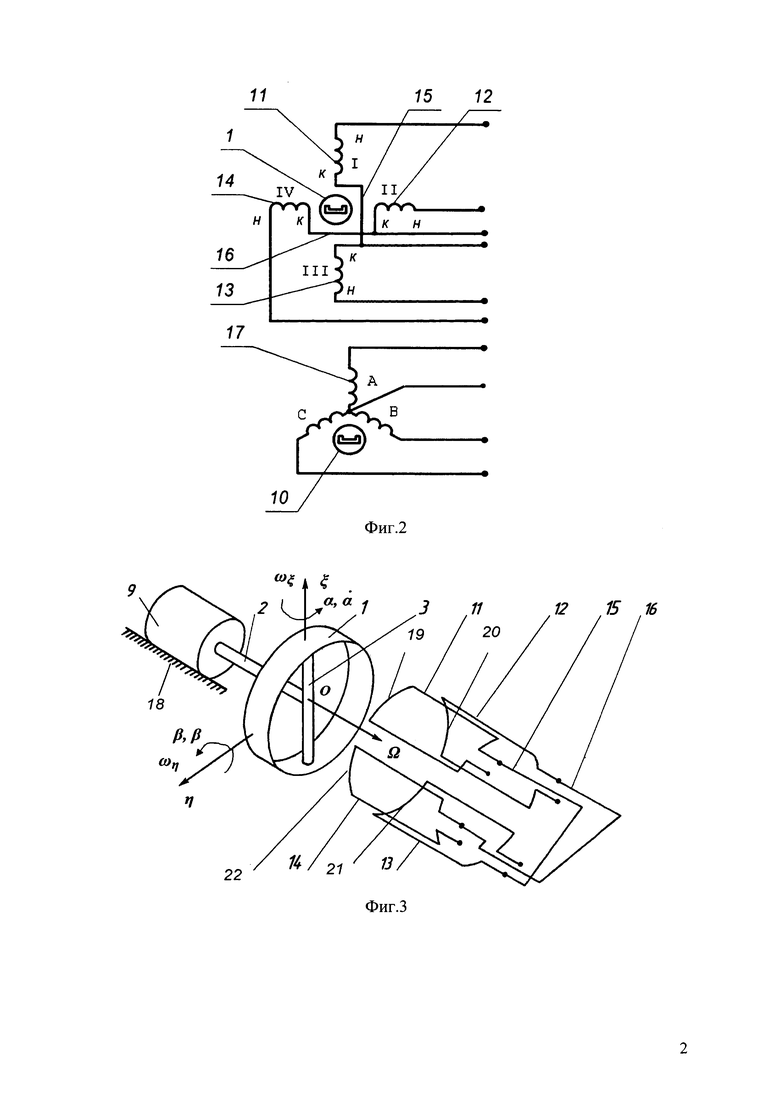
На фиг. 2 представлена электрическая схема заявляемого устройства.
На фиг. 3 представлена кинематическая схема заявляемого устройства.
На чертежах обозначено:
1 - маховик;
2 - вал;
3 - упругий элемент;
4 - магнитопровод;
5 - кольцевой магнит с радиальной намагниченностью от центра к периферии;
6, 7, 8 - катушки статора датчика момента, оси которых расположены с шагом 90° по окружности, а каждая из которых состоит из рабочей обмотки датчика момента и сигнальной обмотки (четвертая катушка на фиг. 1 не показана);
9 - трехфазная рабочая обмотка двигателя;
10 - ротор двигателя;
11, 12, 13, 14 - сигнальные обмотки датчика момента I, II, III и IV соответственно, Η - начало обмотки, К - конец обмотки;
15, 16 - перемычки между сигнальными обмотками датчика момента;
17 - сигнальная обмотка двигателя с фазами А, В и С;
18 - основание (корпус);
19, 20, 21, 22 - рабочие ветви сигнальных обмоток датчика момента, помещенные в воздушный зазор магнитной системы датчика момента.
5. Осуществление изобретения
5.1. Как и в прототипе, предлагаемый роторный вибрационный гироскоп содержит круглый ротор 1, установленный на вал 2 при помощи упругого элемента 3, датчик момента, состоящий из магнитопровода 4, магнита 5, четырех рабочих обмоток в виде катушек 6, 7, 8 статора, расположенных с шагом 90° по окружности (четвертая катушка на фиг. 1 не показана), трехфазная рабочая обмотка 9 двигателя и ротор 10 двигателя.
В отличие от прототипа в предлагаемый роторный вибрационный гироскоп введены:
- сигнальные обмотки 11, 12, 13, 14, выполненные соосно с рабочими обмотками датчика момента. Концы обмотки I (фиг. 2, 3) и диаметрально расположенной обмотки III соединены последовательно встречно перемычкой 15 и образуют датчик угла по каналу β. Концы обмотки II и диаметрально расположенной обмотки IV соединены последовательно встречно перемычкой 16 и образуют датчик угла по каналу α;
- сигнальная обмотка 17 двигателя с фазами А, В и С.
5.2. Измерение абсолютной угловой скорости с использованием предлагаемого роторного вибрационного гироскопа осуществляют следующим образом.
При помощи двигателя приводят во вращение вал 2 с установленным на нем маховиком 1 с резонансной угловой скоростью
Ω2=k/(2IЭ-IО), (1)
где Ω - резонансная угловая скорость вращения;
k - угловая жесткость упругого элемента;
IЭ, ΙО - экваториальный и осевой моменты инерции маховика соответственно.
При вращении основания (корпуса 18) с абсолютной угловой скоростью ω, имеющей проекции на оси чувствительности РВГ ωξ и ωη (фиг. 3), угловое движение маховика относительно основания (корпуса РВГ) будет описываться формулами

где α и β - углы отклонения маховика относительно корпуса;
h1 - конструктивный параметр гироскопа;
ωξ и ωη - проекции абсолютной угловой скорости основания на оси Οξ и Οη гироскопа.
В рабочих ветвях 19, 20, 21 и 22 (фиг. 3) сигнальных обмоток датчика момента, помещенных в воздушный зазор магнитной системы маховика, индуцируется напряжение, пропорциональное скорости колебаний ротора, которое определяется дифференцированием выражений (2). Благодаря последовательному встречному соединению обмоток Ι-ΙΙΙ и II-IV на выводах сигнальных обмоток датчика момента возникает напряжение

где Eα и Εβ - напряжение на выводах сигнальных обмоток Ι-ΙΙΙ и II-IV датчика момента соответственно;
h2 - конструктивный параметр сигнальных обмоток датчика момента;
 и
и  - производные углов отклонения ротора α и β;
- производные углов отклонения ротора α и β;
h=2h1h2Ω
В каждой фазе сигнальной обмотки двигателя индуцируются напряжения с частотой вращения ротора, так в фазе А индуцируется напряжение

где ЕА - напряжение на выводах фазы А сигнальной обмотки двигателя;
h3 - конструктивный параметр сигнальной обмотки двигателя.
Напряжения (3) и (4) преобразуются внешним по отношению к РВГ электронным устройством по следующему алгоритму:
- генерируют базисные функции с угловой скоростью вращения ротора, в общем случае не совпадающие по фазе с напряжением в сигнальной обмотке двигателя:
где γ - произвольный (не известный) сдвиг фазы относительно фазы напряжения ЕА сигнальной обмотки двигателя;
- вычисляют произведения напряжения ЕА на базисные функции:
 - отфильтровывают высокочастотные составляющие:
- отфильтровывают высокочастотные составляющие:

где F{*} - оператор низкочастотной фильтрации;
- вычисляют начальный, ранее не известный, сдвиг фазы базисных функций (5) относительно фазы напряжения ЕА (4) дополнительной обмотки двигателя:

- генерируют детектирующие функции на двойной частоте вращения ротора, синхронизированные с сигналом ЕА:

где UДОП1 и UДОП2 - детектирующие функции, имеющие двойную частоту вращения;
- производят детектирование напряжений на выводах сигнальных обмоток датчика момента (3) при помощи детектирующих функций, имеющих двойную частоту вращения (9), по формулам

где Uξ, Uη - выходные сигналы алгоритма измерения абсолютной угловой скорости.
После подстановки в (10) выражений (3) и (9) получим:
Выражения (11) показывают, что выходные сигналы Uξ и Uη, полученные с использованием напряжения на выводных концах сигнальных обмоток датчика момента и двигателя роторного вибрационного гироскопа, прямо пропорциональны проекциям ωξ и ωη абсолютной угловой скорости объекта.
5.3. Одним из основных параметров, характеризующих точность измерения абсолютной угловой скорости при помощи роторного вибрационного гироскопа, является случайная составляющая погрешности, не зависящей от ускорения. Математическая модель данной погрешности по одному из измерительных каналов α РВГ описывается выражением

где Δωα - случайная составляющая погрешности, не зависящей от ускорения;
ωh - диссипативная составляющая погрешности, вызванная поворотом маховика относительно корпуса на единичный положительный угол вокруг оси измерения погрешности;
ωΔk - консервативная составляющая погрешности, вызванная поворотом маховика на единичный положительный угол вокруг оси, перпендикулярной оси измерения погрешности;
Δα, Δβ - угловое смещение маховика относительно основания вокруг осей α и β, вызванное температурными и другими деформациями конструкции прибора и имеющее низкочастотный характер;
Δω0α - изменение составляющей погрешности, не зависящей от ускорения, измеренной при нулевых углах отклонения маховика и обусловленной различного рода тяжениями (аэродинамическими, магнитными).
Введем в выражения для сигнала датчиков угла (2) углы Δα и Δβ:

В прототипе углы отклонения маховика относительно корпуса измеряются на нулевой частоте, поэтому к полезным сигналам h1ωξ и h1ωη добавляются низкочастотные сигналы Δα и Δβ, вызванные температурными и другими деформациями конструкции прибора. В соответствии с формулой (12) они обусловливают консервативную и диссипативную составляющие погрешности, не зависящей от ускорения (первое и второе слагаемое формулы). В предлагаемом изобретении, благодаря дифференцирующим свойствам датчика угла, после дифференцирования выражений (13) в сигнале датчика угла будут содержаться только составляющие с двойной частотой вращения в соответствии с формулами (3), что говорит об отсутствии чувствительности прибора к изменениям углов отклонения маховика относительно корпуса и отсутствием случайных составляющих консервативной и диссипативной погрешности. Кроме того, составляющая погрешности Δω0α в формуле (12) также уменьшается по сравнению с прототипом вследствие отсутствия магнитных тяжений датчика угла, образованного сигнальными обмотками датчика момента. Таким образом, по сравнению с прототипом из трех составляющих погрешности измерения абсолютной угловой скорости, описываемых формулой (12), в устройстве и способе по предлагаемому изобретению два слагаемых устраняются и одно уменьшается. Считая вклад слагаемых в общую погрешность равновесным, можно сказать, что применение изобретения более чем в 3 раза уменьшает случайную составляющую погрешности, не зависящую от ускорения, чем достигается технический результат - повышение точности измерения абсолютной угловой скорости.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 2017 |
|
RU2653155C1 |
| СПОСОБ РЕЗОНАНСНОЙ НАСТРОЙКИ РОТОРНОГО ВИБРАЦИОННОГО ГИРОСКОПА | 2017 |
|
RU2676061C1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1999 |
|
RU2158902C1 |
| ДАТЧИК УГЛОВОЙ СКОРОСТИ | 2014 |
|
RU2582230C1 |
| ВИБРАЦИОННЫЙ ГИРОСКОП | 2015 |
|
RU2577553C1 |
| ДАТЧИК УГЛОВОЙ СКОРОСТИ НА БАЗЕ МОДУЛЯЦИОННОГО ГИРОСКОПА | 2004 |
|
RU2276773C2 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 2018 |
|
RU2687169C1 |
| ГИРОСКОП-АКСЕЛЕРОМЕТР С ЭЛЕКТРОСТАТИЧЕСКИМ ПОДВЕСОМ РОТОРА И ПОЛНОЙ ПЕРВИЧНОЙ ИНФОРМАЦИЕЙ | 2014 |
|
RU2568147C1 |
| СПОСОБ ИНДИКАЦИИ АБСОЛЮТНОЙ УГЛОВОЙ СКОРОСТИ ОСНОВАНИЯ | 1975 |
|
RU2056623C1 |
| ПРЕЦИЗИОННЫЙ ГИРОСТАБИЛИЗАТОР | 2009 |
|
RU2417352C1 |
Изобретение относится к гироскопической технике и может быть использовано для измерения абсолютной угловой скорости подвижных объектов - самолетов, ракет, морских судов. Изобретением являются устройство и способ измерения абсолютной угловой скорости на базе роторного вибрационного гироскопа, состоящего из круглого маховика, установленного на приводном валу двигателя при помощи упругого торсиона. Магнитная система ротора датчика момента выполнена на маховике и обеспечивает близкую к равномерной индукцию в зазоре, в который вставлены четыре катушки, прикрепленные к корпусу прибора. Двигатель имеет статор с трехфазной обмоткой и ротор в виде постоянного магнита. В приборе отсутствует датчик угла, как отдельный элемент, а его функции выполняют сигнальные обмотки датчика момента, в которых при воздействии на прибор абсолютной угловой скорости индуцируется напряжение с частотой, равной удвоенной частоте вращения ротора. Разложение этого сигнала на составляющие, пропорциональные проекциям вектора угловой скорости, осуществляется при помощи специального алгоритма, обрабатывающего напряжения, индуцированные в сигнальных обмотках датчика момента, и напряжения, получаемого из сигнальной обмотки двигателя. Технический результат – повышение точности измерения абсолютной угловой скорости. 2 н.п. ф-лы, 3 ил.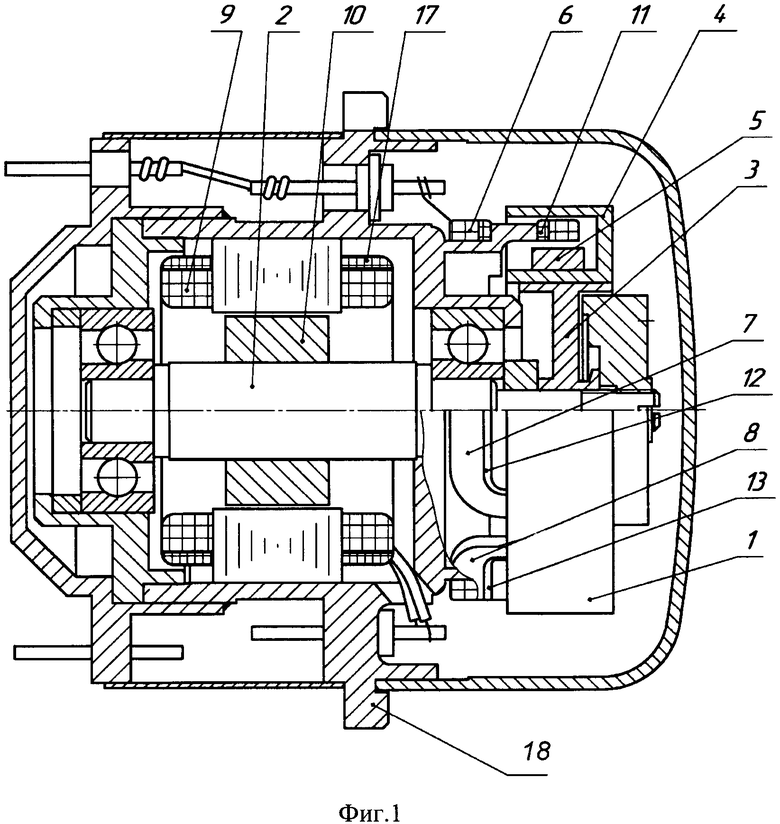
1. Устройство для измерения абсолютной угловой скорости на основе роторного вибрационного гироскопа, содержащего двигатель, имеющий статор с трехфазной обмоткой и ротор в виде постоянного магнита с одной парой полюсов, круглый маховик с встроенной в него магнитной системой, установленный с использованием упругого элемента на валу двигателя, четыре катушки, помещенные в воздушный зазор магнитной системы с шагом 90° и образующие двухкоординатный датчик момента, отличающийся тем, что в каждую из четырех катушек датчика момента введена сигнальная обмотка, диаметрально расположенные сигнальные обмотки соединены последовательно встречно, в статор двигателя введена сигнальная обмотка.
2. Способ измерения абсолютной угловой скорости, заключающийся в измерении отклонения ротора роторного вибрационного гироскопа от его корпуса и отличающийся тем, что для измерения используется напряжение двойной частоты вращения, генерируемое в сигнальных обмотках датчика момента при угловых движениях корпуса, проекции абсолютной угловой скорости определяются детектированием напряжений на выводах сигнальных обмоток датчика момента детектирующими функциями, имеющими двойную частоту вращения ротора вибрационного гироскопа и получаемыми с использованием напряжения в сигнальной обмотке его двигателя.
| RU 2058526 C1, 20.04.1996 | |||
| ГИРОСКОП (ВАРИАНТЫ) | 2005 |
|
RU2308680C2 |
| ДВУХОСНЫЙ ГИРОСКОПИЧЕСКИЙ ИЗМЕРИТЕЛЬ УГЛОВЫХ СКОРОСТЕЙ С ЭЛЕКТРИЧЕСКОЙ ПРУЖИНОЙ | 1993 |
|
RU2118796C1 |
| US 3517562 A, 30.06.1970. | |||

