Изобретение относится к измерительной технике, а именно к грузопоршневым приборам для автоматического воспроизведения.
Известны устройства для измерения и задания давления, содержащие цилиндр с вращающимся неуплотненным поршнем, связанным с платформой для грузов, камеры рабочего и опорного давлений и нагружающее устройство, предназначенное для установки и снятия грузов 1..
Недостатком таких устройств является зависимость величины давления от ускорения силы тяжести грузов, что вносит заметную погрешность в измерения и ограничивает область применения приборов.
Наиболее близким к изобретению является грузопоршневой мановакуумметр, содержащий цилиндр с неуплотненным поршнем и механизмом нагружения, привод вращения поршня, механизм его уравновешивания, ресивер и соединенные с цилиндром регуляторы давления и разряжения 2.
Недостатком этого устройства является зависимость .точности измерений от ускорения силы тяжести грузов.
Цель изобретения - повышение точности измерения за счет уменьшения влияния ускорения силы тяжести на ( процесс измерения.
Указанная цель достигается тем, что в устройство, содержащее цилиндр с неуплотненным поршнем и механизмом нагружения, привод вращения поршня, механизм его уравновешивания и реси10вер, введены фланец с приводом вращения, датчиком скорости и системой автоматического регулирования скорости и датчик положения поршня, которые соединены последовательно Между со15бой и с механизмом уравновешивания, а механизм нагружения .выполнен ввиде рычага, ось кач-ания которого ус|Тановлена на фланце, размещенном в верхней части цилиндра, причем одно
20 из плеч рычага имеет точечный контакт с поршнем в верхней части по его оси.
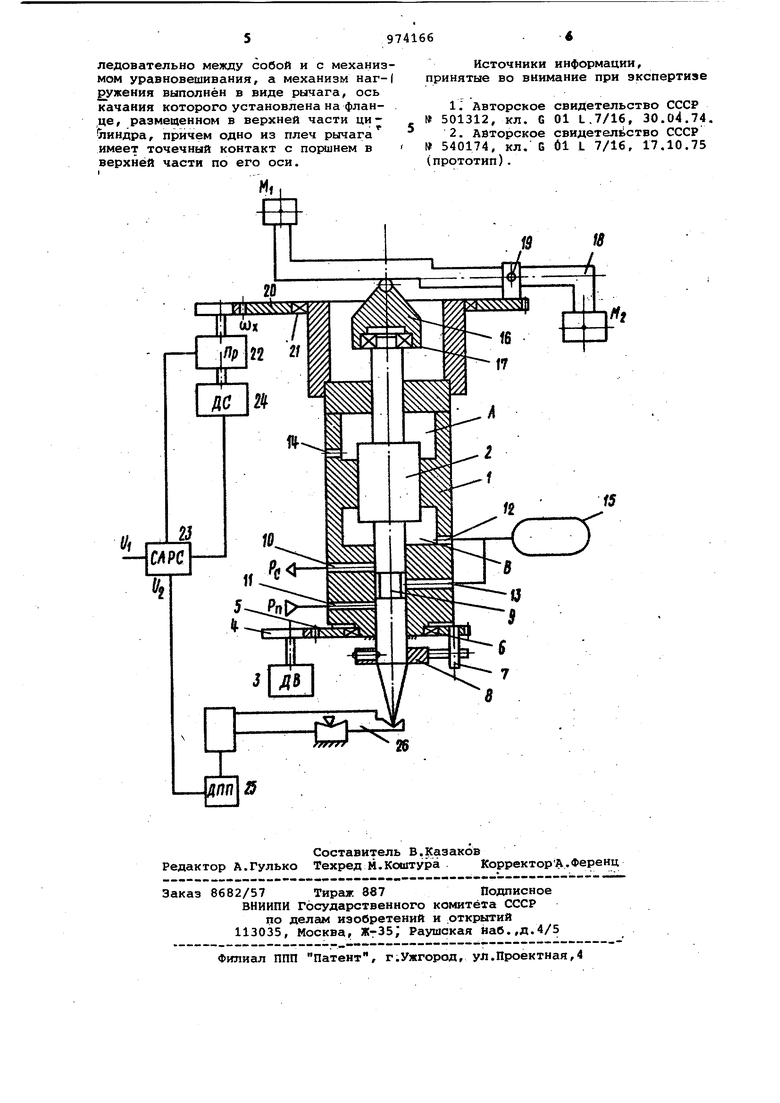
На чертеже изображено предложенное устройство.
25
Грузопоршневой монометр содержит поршневую пару с цилиндром 1 и неуплотненным поршнем 2. Зазор между притерными поверхностями поршня и цилиндра заполняется смазкой. Для сня30тия сухого трения поршень привЬдит ся ,во вращение приводом, состоящим из двигателя 3, шестерни 4, шестерни 5, сидящей на подшипнике б, пoвoдкoвQГ дальца 7, cBHSjifiHoro с шестерней 5 и поводкового хомутика 8, укреплен ного на поршне 2. Привод обеспечивае вращение поршня и не препятствует ос вому перемещению его. Внутри цилиндр 1 находится полость, разделенная бол шим диаметром поршня на две камеры: камеру опорного давления А и камеру рабочего давления Б. На поршне выпол нена кольцевая проточка 9, а в цилин 1дое выполнены каналы в виде радиальгных отверстий 10-14.j К отверстиям 10 и 11 подведены давления: давление сброса Рр от вакуумного насоса и избыточное давление РП от компрессора соответственно. Отверстия 12 и 13 связаны между собой и с реси-i вером 15, в котором задается или измеряется давление. Отверстие 14 соединяется с атмосферой при работе на избыточном давлении или подключается к вакуумному насосу для созДания опорного давления, близкого к нулю при работе на абсолютном давл На силопередающий шарнир 16, связанный с верхним торцом поршня чере подшипник 17, посредством точечного контакта воздействует рычаг 18 механизма нагружения. Рычаг включает себя грузы М и М , размещенные на его концах и ось качания 19, Ось кач ния 19 установлена на фланце 20,укрепленного через, подшипн.ик 21 на цилиндре 1. Фланец 20 приводится во вращение приводом (Пр.) 22. Скорость вращения флайца 20 вместе с рычагом 18 задается и регулируется с помощью системы автоматического регулирования скорости (САРС) 23 с датчиком скорости (ДС ) 24 вреоцения механизма нагружения и датчиком поло жения поршня СДПП) 25. Система автоматического регулирования скорости 23 обеспечивает как высокое постоянство требуемой скорости вращения рычага 18 в режиме задания давления, так и плавное изменение ее в режиме измерения давления в соответствии с сигналом датчика положения поршня 25. Датчик положения поринй 25 свя§ан с рычагом 26, который уравновешивает вес поршня 2, силопередаюЩего шарнира 16 и вес подвижных рычага 18 с грузами М и М. При вращении рычага 18 с угло1вой скоростью на поршень 2 через силопередающий шарнир 16 действует сила, обусловленнгья возникновением Центробежных сил, приложенныхсоответствен но к грузам М и М. Устройство работает следующим образом.. . Режим задания давления. В этом реиме на систему автоматического регулирования скорости 23 подается сигнал и, с приходом которого привод 22, фланец,20 и рычаг 18 начинают . вращаться с определенной, скоростью, Поршень 2 под действием силы, обусловенной возникновением центробежных сил, приложенных к грузам М и опускается вниз, соединяя источник давления Р„ с камерой рабочего давле ния В через кольцевую проточку 9, каналы 13 и 12. Давление в камере В повышается до тех пор, пока не установится равновесие сил. Если давление больше заданного, то поршень поднимается вверх и сбрасывает избыток давления через каналы 12 и 13, кольцевую проточку 9, канал 10 в вакуумный насос. Такой процесс автоматического регулирования протекает до тех пор, пока не наступает равновесие сил. Таким образом, задавая скорость вращения рычага 18, можно получить Необходимое давление в рабочей камере 13 и в ресивере 15. Режим измерения давления. Для работы в этом режиме необходимо перекрыть канал 13 и отключить истрчни-; ки й«евмопитанйяРс п Измеряемое давление подается непосредственно через ресивер 15 в рабочую камеру В. Под действием этого давления поршень 2 поднимается вверх, на датчике положения поршня 25 возникнет сигнал U, который поступает в систему автоматического регулирования скорости. Последняя формирует сигнал на привод 22, который ПРИВОДИТ во вращение рычаг 18 с такой СКОРОСТЬЮ, что возникшая сила, обусловленная Центообежными силами должай уравновесить силу давления. . . Зная скорость вращения рычага 18, , можно определить величину ,измеряемо1го давления. Применение устройства позволяет исключить влияние ускорения силы тяжести на процесс измерения, тем самым повысить точность измерений. Формула изобретения Грузопоршневой манометр, содержащий цилиндр с неуплотненным поршнем и механкэмрм нагружения,привод вращения поршня, механизм его уравновешивания и ресивер, отличающийс я тем, что, с целью повышения точности измерения за счет уменьшения влияния ускорения силы тяжести на процесс измерения, в него введены -: фланец с приводом вращения,датчиком скорости и системой автоматического регулирования скорости и датчик положения поршня, которые соединены пос
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузопоршневой манометр | 1984 |
|
SU1170296A1 |
| Грузопоршневой манометр | 1981 |
|
SU974165A1 |
| Грузопоршневой манометр абсолютного давления | 1990 |
|
SU1778567A1 |
| Грузопоршневой манометр абсолютного давления | 1983 |
|
SU1158989A1 |
| Грузопоршневой манометр | 1985 |
|
SU1254324A1 |
| Грузопоршневой мановакууметр абсолютного давления | 1978 |
|
SU708184A2 |
| Грузопоршневой мановакуумметр | 1975 |
|
SU540174A1 |
| Грузопоршневой манометр абсолютного давления | 1989 |
|
SU1622786A2 |
| Грузопоршневой манометр абсолютного давления | 1987 |
|
SU1478058A1 |
| Грузопоршневой мановакуумметр абсолютного давления | 1978 |
|
SU669236A1 |
