(54) ПУЗОПОРШНЕВОЙ МАНОВАКУУММЕТР
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузопоршневой мановакуумметр абсолютного давления | 1978 |
|
SU669236A1 |
| Грузопоршневой мановакуумметр абсолютного давления | 1978 |
|
SU669235A1 |
| Грузопоршневой манометр абсолютного давления | 1990 |
|
SU1778567A1 |
| Грузопоршневой манометр | 1981 |
|
SU974165A1 |
| Грузопоршневой мановакууметр абсолютного давления | 1978 |
|
SU708184A2 |
| Грузопоршневой манометр | 1981 |
|
SU974166A1 |
| Грузопоршневой мановакууметр абсолютного давления | 1978 |
|
SU684348A1 |
| ГРУЗОПОРШНЕВОЙ МАНОВАКУУММЕТР | 1967 |
|
SU198738A1 |
| Грузопоршневой манометр абсолютного давления | 1987 |
|
SU1478058A1 |
| Грузопоршневой манометр абсолютного давления | 1983 |
|
SU1158989A1 |
Изобретение относнтся к области измерительной техники, а именно к грузопоршневым приборам для автоматического воспроизведения абсолютного (и избыточного) давления, и может быть применено при ностроешга автоматических образцовых грузопоршневых приборов, используемьк в метролг- и для поверки рабочих мановакуумметров.
Известны грузопоршневые приборы, содержащие цилиндр с неуплотненным поршнем и набор грузов.
Наиболее близким по технической сущности и достигаемому эффекту к предлагаемому устройству является грузопоршневой мановакуумметр, содержащий цилиндр с неуплотненным порпшем с рабочей камерой опорного давления, с входами избыточного давления и вакуумным входом, систему создаршя давления (разрежения) воздуха и механизм уравновеишва1шя.
Недостатком известного устройства является проседание поршня, т.е. изменение равновесного положения поршня при воспроизведении различных значений давления, причем проседание поригая тем больше, чем больше значение воспроизводимого давления. Это явление может быть объяснено .тем, что и реальном приборе существуют микроутечки воздуха через кольцевые микронные зазоры между поршнем и цилиндром, которые прямо Пропорциональны перепаду давлений питания и воспроизводимого давления. Колшенсация утечек воздуха в приборе происходит автоматически за счет постоянного пополнения количества воздуха в замкнутом объеме через приоткрытьш канал поршня, т.е. работой прибора в установившемся режиме на расходе, причем, чем больше перепад давления на переменном дросселе, тем ниже опускается поршень, т.е. тем больше приоткрывается регулирующий канал.
Это приводит к тому, что в приборе появляется статическая ошибка, которая пропорциональна положению поришя или значению воспроизводимого давления. Кроме того, при больших перепадах давления на переменном дросселе наблюдается излишняя колебательность переходного процесса.
Целью изобретения является повыше{ше точности и улучшение динамических характеристик автоматических грузопоршневых приборов для воспроизведения абсолютного давления.
Поставленная цель достигается тем, что в грузопоршневом мановакуумметре, содержашем цилиндр с неуплотненным 11оршь1ем, рабочую камеру
и камеру опорного давления, выходной канал избыточиого давления и вакуумный канал, систему создания давления (разрежения) воздуха и механизм уравновешивания введен регулятор давления и регулятор разрежения, каждьш из которых выполнен в виде цилиндра, размещенного в нем поршня и двух камер, рабочей камеры и камеры обратной связи. При этом камеры обратной связи обоих регуляторов пневматически соединены между собой и с рабочей камерой грузопоршневого мановакуумметра.
Рабочие камеры регуляторов давления и разрежения пневматически сЪединены соответственно с каналом избь уочного давления и вакуумным . каналом грузопоршневого мановакуумметра.
Таким образом, при задании различных значений давлений сохраняется одно и то же положение поришя, и оишбка положения во всем диапазоне значений восгроизводимых давлений будет постоянной. Значение ошибки воспроизведения давления определяется значением перепада и по сравнению с действуюшими приборами может быть уменьшена примерно на порядок. Улучшение динамических характеристик прибора в переходном режиме происходит за счет уменьшения колебательности подвижных частей прибора при скачкообразном изменении давления на входе также за счет уменьшения перепада давлений между входом и выходом прибора.
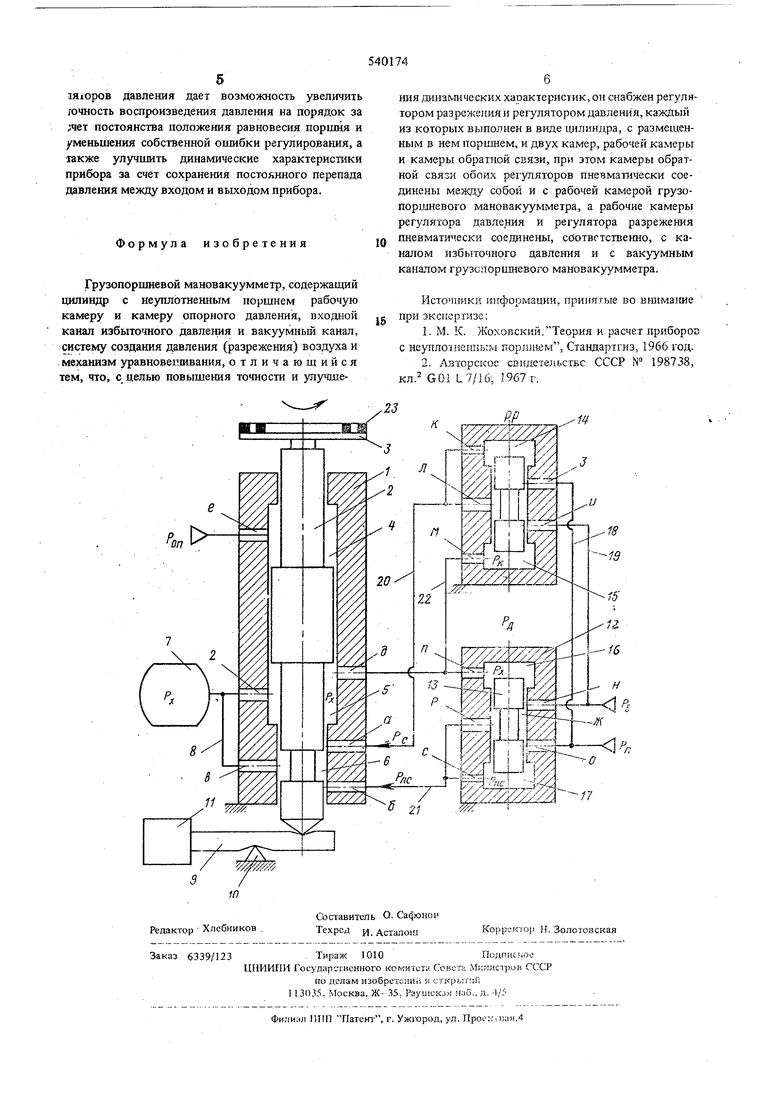
На чертеже приведена принципиальная схема грузопоршневого мановакуумметра с устройством компенсации утечек воздуха.
Грузопоршневой мановакуумметр состоит из цилиндра 1; в котором расположен поршень 2, связанный с платформой нагружения 3. Между поршнем 2 и шшиндром 1 имеются две камеры камера опорного давления 4 и рабочая камера (камера обратной связи) 5. На поршне имеется Канал в виде кольцевой канавки 6; в цилиндре - каналы в виде радиальных отверстий а-е. К отверстиям а, б, е подведены давления: давления вакуума РВС, избыточное давление РПС, опорное давление РОП. соответственно. Отверстия в стенках цилиндра б и г связаны между собой и ресивером 7 трубопроводом 8. Урарчовешивание поршня 2 с платформой 3 осушествлено с помошью рычажной механической связи, состоящей из коромысла 9, лежащего на призме Ю, на один конец которого опирается основание поршня 2, а т. установлен противовес И.
Устройство компенсации утечек воздуха выполнено в-виде двух оданаковьк регуляторов - регулятора разрежения (РР) и регулятора давления (РД), каждый из которых состоит из цилиндра 12 и размещенного в нем поршня 13. На нем имеется каналв виде кольцевой канав ки., а в цилиндре 12 - каналы в виде радиаль)1ых отвйрстий з-м (РР) и н-с (РД). В регуля/орах имеются замкнутью ка .меры 14 и 15 в РР, 16 и 17 в РД. Отверстияз и о. и и н соединены между собой трубоароводами 18 и 19
и к ним подведены давления питания РП и РВ, соответственно.Отверстия ки л в цилиндре 12 (РР) соединены между собой и Отверстием а цилиндра 1 трубопроводом 20; отверстия р и с в цилиндре 12
5 (РД) соединены между собой и отверстием б цилиндра 1 трубопроводом 21. Отверстиями и л в цилинд,ре 18 соединены между собой и с отверстием д цилиндра 1 трубопроводом 22.
Перед началом работы прибора подвижные его
O элементы - поршень 2 с платформой нагружения 3 приводятся в равновесие таким образом, чтобы отверстия а и б в стенке цилиндра 1, по которым поступают давлен-ш РВС и РПС, были перекрыты телом поршня 2. Затем к прибору подключают компресg сор для создашя давления РПС и ;-цва вакуумметрадля создания давлений РВС и РОП.
Для заданий определенного значения давления РХ на платформу нагружения накладьтают тарированный пропорционально эффективной, площади
0 цоршня 2 груз 23 и после окончания переходного процесса в ресивере 7 и рабочей камере 5 устанавливается давление РХ.
Для пояснения работы регуляторов разрежения и давления рассмотрим простейшие }фавнения их 5 равновесия.
Если обозначим Qp - вес поршня 13 регулятора; SP - эффективная площадь поршня 13 регулятора, то для регулятора разрежешя может быть записано уравнение равновесия:
Рвс-5р-Юр-Рх5р 0
Откуда давление на его выходе РВС равно
PBC Px-f
Для регулятора давления уравнения равновесия:
PxSp-t-Qp-Pn(fSp 0
Откуда давление на его выходе равно
РПС РХ + -- ЬР Анализ выражений давлений РВС и РПС, поступающих с выходов РР и РД на соответствующие входы (отверстия д и 5 в цилиндре 1) показьюают,, что при задании на выходе прибора любого значения давления РХ чсегда сохраняется постоян1Пз1м перепад давлений между входом а и выходом в и между входом б и выходом в и он равен
(Эр
бр
. вс ч 5р
6р
P..L
Р .
SP
Таким образом, перепад давления па регулирующем дросселе не зависит от зпачепия воспроизводимого давле 1ия и определяется отноилением веса (массы) поршня 13 регулятора к его эффективной площади, т.е. сохраняется постоянным при воспроизведении любого значения давлет1ия из всего диапазона работы прибора.
Применение в схеме автоматического грузрпоршневого прибора даух вспомогательных рсгу
