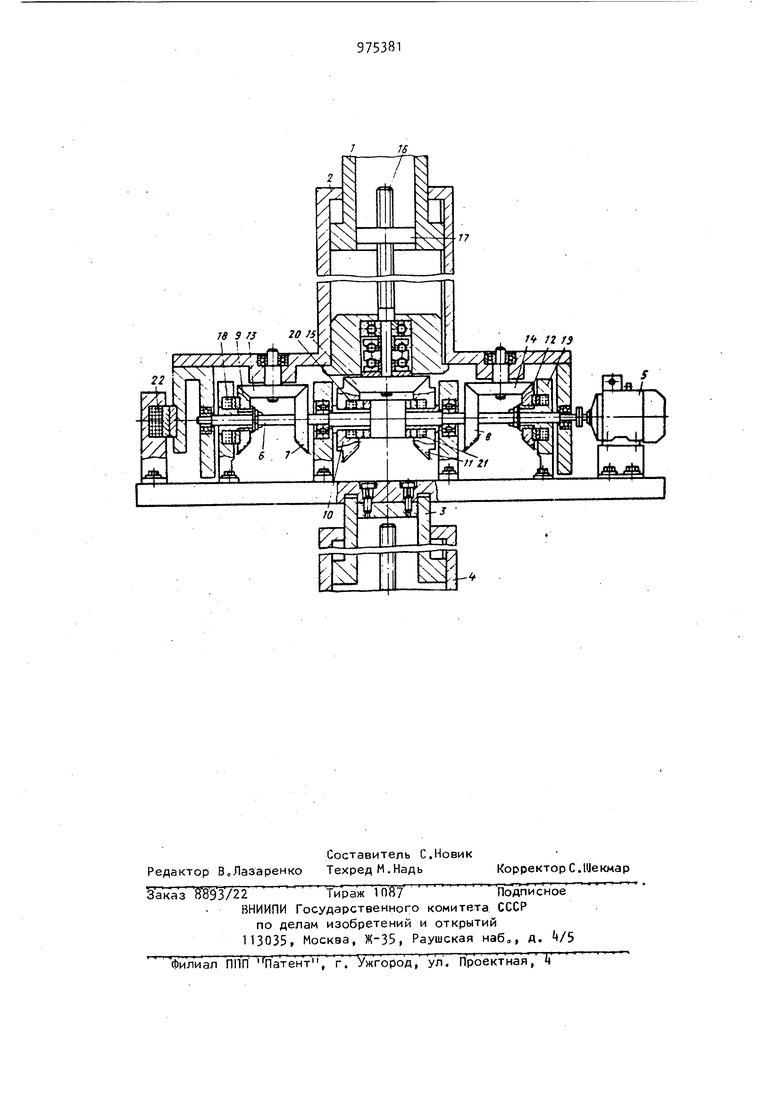
Изобретение относится к машиностроению, а именно к манипуляторам для механизации ручных производственных операцийо Известен исполните 1ьный орган манипулятора, содержащий двигатель, шарнирно связанные звенья и механизмы изменения длин и поворота звеньев 1 . Недостатком известной конструкции является наличие в ней дополнительного двигателя для изменения длин звеньев, что усложняет конструк цию, и малая зона обслуживания Цель изобретения - упрощение конструкции и расширение его технологических возможностей, Эта цель достигается тем, что известная конструкция снабжена передаточным устройством, выполненным в виде планетарного механизма, а также элементом фиксации угла поворота звеньев, причем передаточное устройство кинематически связано с двигателем и с механизмом поворота звеньев. На чертеже показан общий вид исполнительного органа манипулятора , разрез. Исполнительный орган манипулятора содержит телескопические звенья, образованные соединением деталей 1 и 2, а также 3 и Ц, и двигатель 5 с редуктором. Двигатель 5 связан с валом 6, на котором жестко сидят конические шестерни 7 и 8. Кроме того, на валу 6 на подшипниках скольжения размещены шестерни . Устройство содержит также конические колеса 13 и 14, которые совместно с шестернями 9, 7 и 8, 12 образуют пару планетарных механизмов. Шестерни 10 и 11 находятся в зацеплении с коническим колесом 15, установленным на валу червячной передачи, винт 16 которой связан с гайкой 17, жестко соединенной с деталью 1 од39ного из звеньев руки манипулятора. Шестерни 9 и 12 фрикционными электро магнитными муфтами соответственно 18 и 19 и аналогичные муфты 20 и 21 связывают с валом 6 шестерни 10 и 11 соответственно Элемент 22 фиксации соединяет между собой при необходимости элементы деталей 2 и 3 звеньев исполнительного органа манипулятора, Исполнительный орган манипулятора работает следующим образом Двигатель 5 через вал 6 вращает конические шестерни 7 и 8. Последние передают вращение через конические колеса 13 и Il на шестерни 9 и 12, Дальнейшая работа привода шар- нирного соединения зависит от режимов включения муфт 18-21, В зависимости от комбинаций ..включения муфт привод исполнительного органа позволяет осуществи1ь три основных режима. |1ервый режим Муфты 18 и 19 включены, муфты 20-21 выключены о В этом случае шестерни 9 и 1 : остановлены, так как они жестко связываются с основанием детали Зо Вращающие моменты шестерен 10 и 11 на коническое колесо 15 не передаются,, Привод работает в режиме с постоянными длинами звеньев Изменение направления вращения звеньев в шарнире достигается реверсированием двигателя 5о Второй режим . Муфты 20 (либо 21) и элемент 22 включены, муфты 18,. 19 и 21 (либо 20) выключены..Вращающий момент передается с шестерни 10 (11) через коническое колесо 15 на вал че влчной передачи (винт 16), При этом длина ззена, состоящего из деталей 1 и 2j изменяется, а взаимное оасположение звеньев исполнительного органа остается постоянным. Третий режим,Заключается в комбинировании первых двух. При этом муфты 1В, 19 и 20 (либо 21) включены, муфта 21 ( 20 ) выключена. Это обеспечивает одновременное качание в шарнире звеньев относительно друг друга и изменение длины , состоящего из деталей 1 и 2. При реверсировании двигателя 5 направление качания изменяется, в этом случае меняется переключение муфты 20 (либо 21). Характерной чертой предлагаемой конструкции является ее простота, а также увеличивается диапазон изменения длин звеньев-за счет использования их телескопических конструкций при определенных габаритных размерах. Формула изобретения Исполнительный орган манипулятора, содержащий шарнирно связанные звенья, двигатель и механизмы изменения длин и угла поворота звеньев, отличающийся тем, что, с целью упрои ения конструкции и увеличения технологических возможностей, он снабжен передаточным устройством, выполненным в виде планетарного механизма, а также элементом фиксации угла поворота звеньев, причем передаточное устройство кинематически связано с двигателем и с механизмом Поворота звеньев. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР f« 8U718, кл, В 25 J 3/00, 1981.
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган манипулятора | 1984 |
|
SU1161370A2 |
| Исполнительный орган манипулятора | 1985 |
|
SU1301684A1 |
| Исполнительный орган манипулятора | 1991 |
|
SU1779587A1 |
| Исполнительный орган манипулятора | 1978 |
|
SU814718A1 |
| ЗУБЧАТО - ИМПУЛЬСНЫЙ ВАРИАТОР | 2016 |
|
RU2636440C2 |
| Модуль исполнительного органа манипулятора | 1985 |
|
SU1301689A1 |
| Исполнительный орган манипулятора | 1975 |
|
SU541662A2 |
| Манипулятор | 1979 |
|
SU871991A1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ПОРШНЕЙ В ЦИЛИНДРАХ ПОРШНЕВОГО РОТОРА ВО ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ РОТОРА И ПЕРЕДАТОЧНЫЙ МЕХАНИЗМ | 2012 |
|
RU2518136C2 |
| Манипулятор | 1989 |
|
SU1743850A1 |