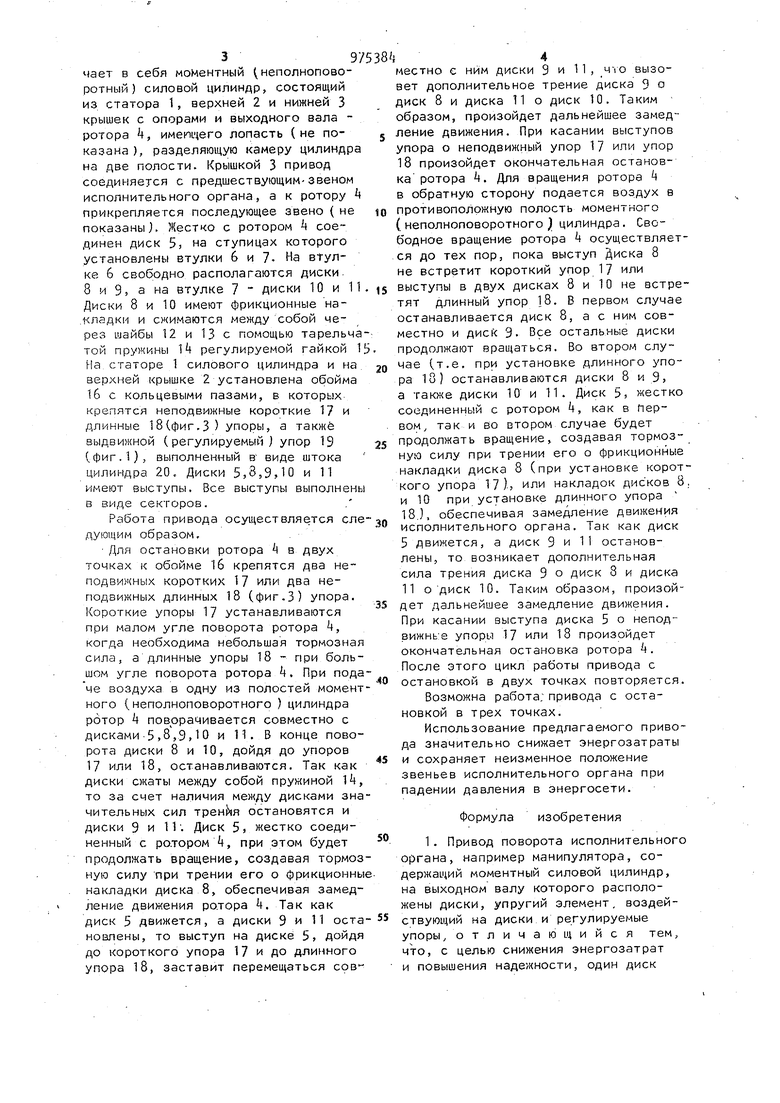
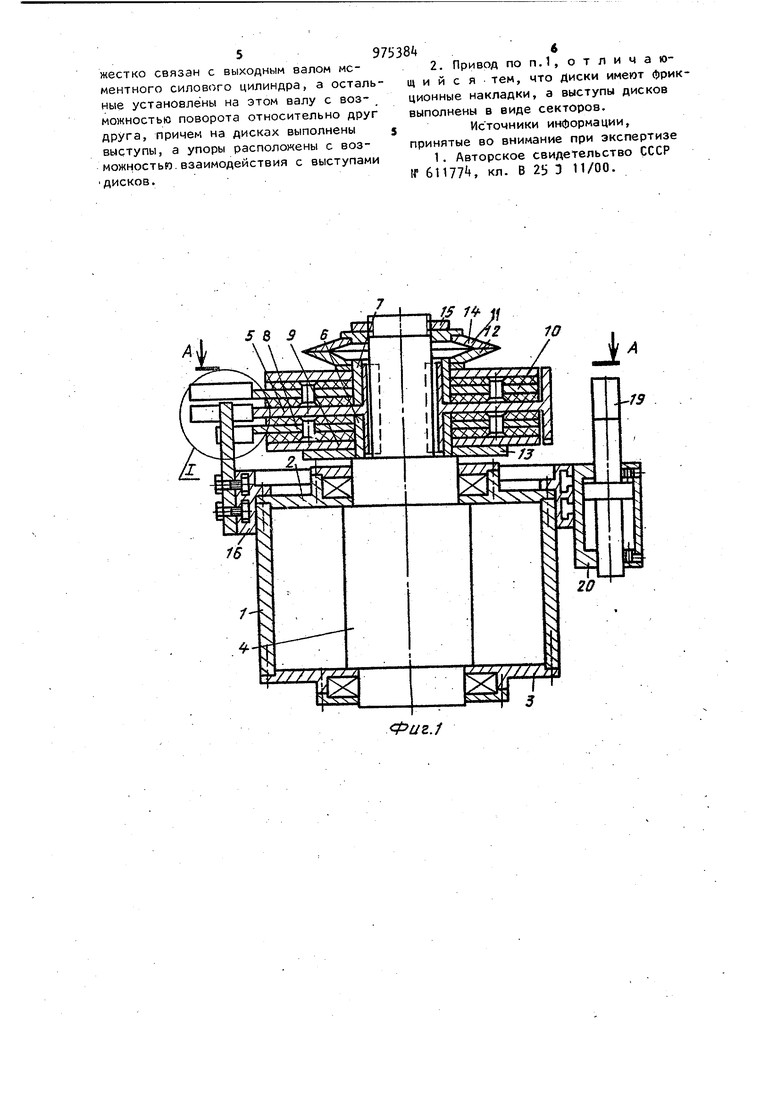
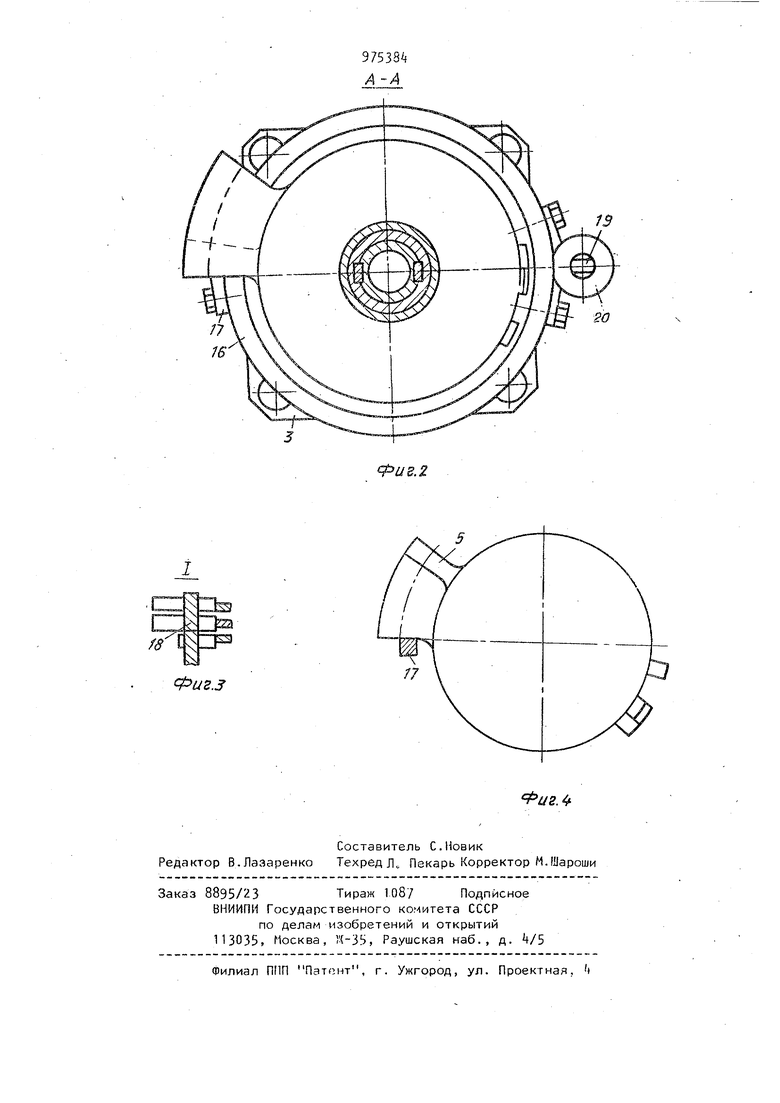
1 . Изобретение относится к механизации и автоматизации производственных процессов, в частности к приводам поворота исполнительных органов, например роботов, манипуляторов и других устройств, и может быть использовано в различных отраслях народного хозяйства. Известен привод поворота исполнительного органа манипулятора, содержащий моментный силовой цилиндр, на валу которого расположены диски, упругий элемент, воздействующий на диски, и регулируемые упоры 1 Недостатком этой конструкции явля ется то, что плавная остановка дости гается за счет деформации пружин, что требует дополнительных затрат энергии для создания значительного давления в моментном цилиндре при поджиме дисков к упорам, а при падении давления в энергосети исполнительный орган может произвольно по вернуться, что изменит его геометрическое положение и снизит надежность устройства в целом. Цель изобретения - снижение затрат энергии на работу, привода и повышение надежности его работы. Эта цель достигается, тем, что один диск жестко связан с выходным валом момёнтного силового цилиндра, а остальные уст.ановлены на этом валу с возможностью поворота относительно друг друга, причем на дисках выполнены выступы, а упоры расположены с возможностью взаимодействия с выступами дисков. Кроме того, диски имеют фрикционные накладки, а выступы дисков выполнены в виде секторов. На фиг.1 показан привод поворота, общий вид; на фиг.2 - разрез А-Л на фиг.1; на фиг.З узел 1 на фиг.1; на фиг. - вариант взаимодействия выступов дисков с упорами. Привод поворота исполнительного органа, например, манипулятора, вкль)чает в себя моментный неполноповоротный) силовой цилиндр, состоящий из статора 1, верхней 2 и нижней 3 крышек с опорами и выходного вала ротора k, имеющего лопасть ( не показана ), разделяющую камеру цилиндр на две полости. Крышкой 3 привод соединяется с предшествующим-звеном исполнительного органа, а к ротору прикрепляется последующее звено ( не показаны. Жестко с ротором k соединен диск 5, на ступицах которого установлены втулки 6 и 7. На втулке 6 свободно располагаются диски 8 и 9, а на втулке 7 диски 10 и 1 Диски 8 и 10 имеют фрикционные на.кладки и сжимаются между собой через шайбы 12 и 13 с помощью тарельча той пружины Ik регулируемой гайкой 1 На статоре 1 силового цилиндра и на верхней крышке 2 установлена обойма 16с кольцевыми пазами, в которых крепятся неподвижные короткие 17 и длинные 18(фиг.3 ) упоры, а также выдвижной (регулируемый ) упор 19 (.фиг.1), выполненный в виде штока цилиндра 20, Диски 5,8,9,10 и 11 имеют выступы. Все выступы выполнены в виде секторов. Работа привода осуществляется еле дующим образом, . Для остановки ротора в двух точках к обойме 16 крепятся два неподвижных коротких 17 или два неподвижных длинных 18 (фиг-З) упора. Короткие упоры 17 устанавливаются при малом угле поворота ротора k, когда необходима небольшая тормозная сила, а длинные упоры 18 - при большом угле поворота ротора . При пода че воздуха в одну из полостей момент ного (негюлноповоротного ) цилиндра ротор k поворачивается совместно с дисками-5,8,9,10 и 11. В конце поворота диски 8 и 10, дойдя до упоров 17или 18, останавливаются. Так как диски сжаты между собой пружиной 1, то за счет наличия между дисками зна чительных сил тренья остановятся и диски 9 и 11; Диск 5, жестко соединенный с ротором t, при этом будет продолжать вращение, создавая тормоз ную силу при трении его о фрикционны накладки диска 8, обеспечивая замедление движения ротора k. Так как ДИСК 5 движется, а диски 9 и 11 оста- 55 ноалены, то выступ на диске 5, дойдя до короткого упора 17 и до длинного упора 18, заставит перемещаться соз 9 } местно е ним диски 9 и 11, что вызовет дополнительное трение диска 9 о диск 8 и диска 11 о диск 10. Таким образом, произойдет дальнейшее замедление движения. При касании выступов упора о неподвижный упор 17 или упор 18 произойдет окончательная остановка ротора 4. Для вращения ротора 4 в обратную сторону подается воздух в противоположную полость моментного (неполноповоротногоJ цилиндра. Свободное вращение ротора k осуществляется до тех пор, пока выступ Диска 8 не встретит короткий упор 17 или выступы в двух дисках 8 и 10 не встретят длинный упор 1,8. В первом случае останавливается диск о, а с ним совместно и дисй Э. Все остальные диски продолжают вращаться. Во втором случае (т.е. при установке длинного упора 18) останавливаются диски 8 и 9, а также диски 10 и 11. Диск 5, жестко соединенный с ротором k, как в Первом, так и во втором случае будет продолжать вращение, создавая тормозную силу при трении его о фрикционные накладки диска 8 (при установке короткого упора 17)., или накладок дисков 8, и 10 при установке длинного упора 18.). обеспечивая замедление движения исполнительного органа. Так как диск 5 движется, а диск 9 и 11 остановлены, то возникает дополнительная сила трения диска 9 о диск 8 и диска 11 одиск 10. Таким образом, произойдет дальнейшее замедление движения. При касании выступа диска 5 о непод8ижнь:е упоры 17 или 18 произойдет окончательная остановка ротора 4. После этого цикл работы привода с остановкой в двух точках повторяется. Возможна работа; привода с остановкой в трех точках. Использование предлагаемого привода значительно снижает энергозатраты и сохраняет неизменное положение звеньев исполнительного органа при падении давления в энергосети. Формула изобретения 1. Привод поворота исполнительного органа, например манипулятора, содержащий моментный силовой цилиндр, на выходном валу которого расположены диски, упругий элемент, воздействующий на диски и регулируемые упоры, отличающийся тем, что, с целью снижения энергозатрат и повышения надежности, один диск жестко связан с выходным валом мсментного силового цилиндра, а остальные установлены на этом валу с возможностью поворота относительно друг друга, причем на дисках выполнены выступы, а упоры расположены с возможностью, взаимодействия с выступами ДИСКОВ. 9 2. Привод ПОП.1, отличающийся тем, что диски имеют фрикционные накладки, а выступы дисков выполнены в виде секторов. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР tf 61177, кл. В 25 3 11/00.
1уТ/
W ,
L J
Paz.l
