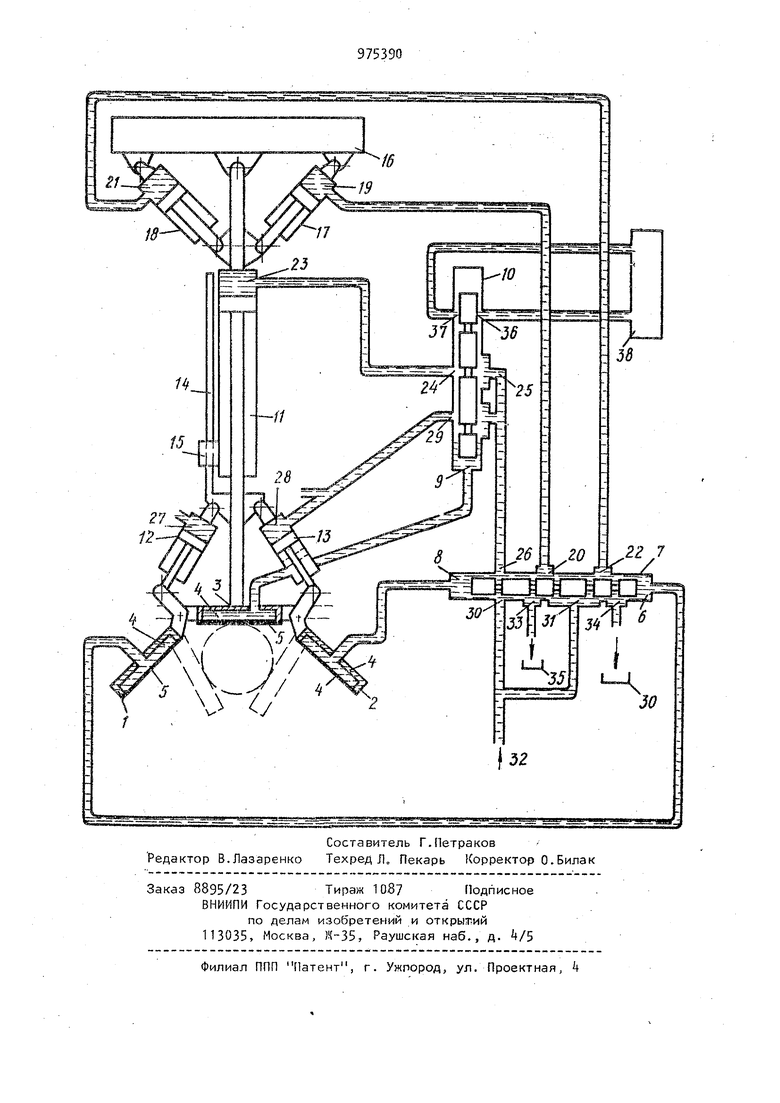
(5) МЕХАНИЗМ ДЛЯ ЗАХВАТЫВАНИЯ ИЗДЕЛИЙ Изобретение относится к машиностроению, в частности к робототехнике. . Известен механизм для захватывания изделий, содержащий основание, на котором смонтирована пята с захватами, шарнирно связанными между собой и со штоками гидроцилиндров перемещения соответственно пяты и з хватов, и устройство управления гидроцилиндрами 1 . Недостатком известного механизма являются его низкие технологические возможности, поскольку он не обладает очувствлением для захватывания изделий, несориентированных относительно оси механизма. Цель изобретения - расширение те нологических возможностей путем очувствления для захватывания издеЛИЙ , несориентированных относитель но оси механизма. Эта цель достигается тем, что известный механизм снабжен дополнительными гидроцилиндрами, шарнирно связанными.с основанием и с корпусом гидроцилиндра перемещения пяты, на штоке которого шарТ1ирно закреплены корпуса гидроцилиндров перемещения захватов, причем пята и захваты выполнены в виде заполненных жидкостью камеры, имещих диафрагму, а устройство управления гидроцилиндрами выполнено в биде системы гидравлических золотников, при этом торцовые полости золотника управления дополнительными гидроцилиндрами соединены с камерами захватов, а торцовая полость золотника управления гидроцилиндрами переме1цения пяты и захватов - с камерой пяты. На чертеже изображена схема предлагаемого, механизма. Механизм для захватывания изделий состоит из шарнирно связанных между собой двух захватов 1,2 и пяты 3, каждые из которых выполнен в виде
заполненной жидкостью камеры k, имеющей диафрагму 5.
Камера 4 захвата 1 соединена с торцовой полостью 6 золотника 7, камера 4 захвата 2 - с торцовой полостью 8, а камера пяты 3 соединена с торцовой полостью 9 золотника 10. Золотники 7 и 10 входят и устройство управления. Захваты 2 и 1 шарнирно связаны с пятой 3, жестко закрепленной на штоке гидроцилиндра 11 двустороннего действия, а захват 2 - со штоком гидроцилиндра 13. Корпуса гидроцилиндров 12 и 13 закреплены На штоке гидроцилиндра П, шток которого удерживается от переворачивания стержнем Ik, взаимодействующим с упором 15, расположенным на корпусе гидроцилиндра 11, шарнирно закрепленного на основании 16. На основании также шарнирно закреплены корпуса дополнительных цилиндров 17 и 18, штоки которых шарнирно связаны с корпусом гидроцилиндра 11. 19 гидроцилиндра
17гидравлически связана с выходным каналом 20 золотника 7, а полость 21 гидроцилиндра 18 - с каналом 22. Полость 23 гидроцилиндра 11 гидравлически соединена с-каналом 24 золотника10 и черезего канал 25 с выходным каналом 2б золотника 7- Полости 27, 28 гидроцилиндров 12 и 13 гидравлически соединены с каналом
29 золотника 1.0 и через канал 25 с каналом 26 золотника 7 каналы 30 и 31 которого соединены с источником 32 давления, а каналы 33 и с системой. 35 слива. Каналы Зб и 37 золотника 10 соединены с командным устройством 38. Полости обратного хода гидроцилиндров 11, 12, 13 и 17,
18гидравлически соединены с тем же командным устройством 38. Эти соединения на чертеже не пок аныМеханизм работает следующим обраЗОМ.
При включении источника 32 давления, когда золотник 7 находится в
/
нейтральном положении, жидкость из
канала 30 поступает в канал 2б и далее в канал 25 золотника 10, откуда через открытый канал 2k поступает в гюлость 23 гидроцилиндра 11. Шток, гидроцилиндра 11 начнет двигаться. Если изделие, предназначенное для захвата, находится строго по оси механизма, то пята 3 войдет в контакт
с изделием своей диафрагмой 5, кото.рая прогнется и в камере k пяты 3, заполненной жидкостью, будет создано давление, которое передастся в полость 9 золотника 10. Золотник 10 переместится и перекроет канал 2k, шток гидроцилиндра 11 прекратит свое выдвижение, и через открывшийся ка.нал 29 жидкость начнет поступать в полости 27, 28 гидроцилиндров 12 и 13. Штоки этих гидроцилиндров начнут выдвигаться, шарнирно связанные с ними захваты 1 и 2 замкнут изделие. Как только,от(УСИЛИЯ-зажима изделия, создаваемого гидроцилиндрами 12 и 13 захватов 1 и 2, давление в камере k пяты 3, а следовательно, и в полости 9 золотника.10 достигнет определенного предела, золотник 10 перекроет канал 29- Полости 27 и 28 гидроцилиндров 12, 13 будут гидравли: чески заперты. Так как движение, штоков гидроцилиндров 12, 13 захватов 1 и 2 прекращается при достижении определенного усилия на изделие, то его размеры и форма могут быть раз,личными, т.е. механизм имеет широкие технологические возможности. Изменяя положение канала 29 относительно кольцевой проточки золотника 10,мож;но регулировать усилие зажима издели Через открывшийся канал 37 командное устройство 38 получит сигнал о захвате изделия. Если изделие, предназначенное для захвата, находится в стороне от оси, то в контакт с ним войдет своей диафрагмой 5 один из захватов 1 или 2. При контакте с изделием, например захвата 1, в его камере k будет создано давление,такое же давление будет создано и в полости 6 золотника 7« Вследствие разницы давлений в полостях 6 и 8 золотник 7 переместится влево и перекроет канал 2б, прекратится выдвижение штока гидроцилиндра 11.Через открывшийся канал 3k жидкость .из гидроцилиндра 18 пойдет в систему 35 слива, а в гидроцилиндр 17 начнет поступать жидкость по каналу 20. :Как только захват 1 выйдет из кон такта с изделием, давление в полЪстях 6 и 8 устраняется и золотник 7 займет нейтральное положение ..НачнеТ выдвигаться шток гидроцилиндра 11. При повторном контакте с изделие захвата 1 все повторится. Так будет прЪдолжаться до тех пор, пока в контакт с изделием не войдет пята 3, тогда начнется захват изделия. Если при захвате изделия оно будет находиться в стороне от оси, то при сведении захватов 1,2 один из них вступит в контакт с изделием раньше золотник 7 переместится в ту или другую сторону, и одним из цилиндров 17 или 18 будет произведена корректи ровка до тех пор, пока давление в ка мерах 3 захватов 1,2 не станет одинаковым и изделие не будет зажато. Аналогично работает механизм и при контакте захвата 2 с изделием. При этом повысится давление в полости 8, золотник 7 сместится вправо, жидкость начнет поступать в гидроциляндр 18. .. Таким образом, предлагаемый меха низм, обладая очувствлением, обеспе чивает автоматический поиск изделия и его захват с возможностью регулй;ровки давления зажима. Формула изобретения Механизм для захватывания изделий, содержа1 }ий основание, на котором. смонтирована пята с захватами, шарнирно связанными между собой и со штоками гидроцилиидров перемещения соответственно пяты и захватов, и устройство управления гидроцилиндрами, отл.ичающийся тем, что, с целью расширения технологических возможностей путем очувствления для захватывания изделий, несориеитированных относительно оси механизма, он снабжен дополнительными гидроцилиндрами, шарнирно связанными с основанием и с корпусом гидроцилиндра перемещения пяты, на штоке которого шарнирно закреплены корпуса гидроцилиндров переме1цения захватов, причем пята и захваты выполнены в виде заполненных жидкостью камер, имеющих диафрагму, а устройство управления гидроцилиндрами выполнено в виде системы гидравлических золотников,-при этом торцовые полости золотника управления дополнительными гидроцилиндрамй соединены с камерами захватов,а торцовая полость золотника управления гидроцилиндрами перемещения пяты и захватов - с камерой пяты. Источники информации, принятые во внимание при экспертизе 1. Авторское С;видетельство СССР № 258555, кл. В 65 G , 1968.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм для захватывания изделий | 1982 |
|
SU1013265A1 |
| Механизм для захватывания изделий | 1982 |
|
SU1122504A1 |
| Запястье манипулятора | 1987 |
|
SU1433796A1 |
| Автоматический станок для обработки поршневых колец | 1984 |
|
SU1161306A1 |
| Гидравлическое устройство ударногодЕйСТВия | 1979 |
|
SU800348A1 |
| Захватная головка | 1988 |
|
SU1537527A1 |
| Следящая система управления рабочим органом | 1985 |
|
SU1293287A1 |
| УСТРОЙСТВО УДАРНОГО ДЕЙСТВИЯ ДЛЯ ПОГРУЖЕНИЯ СТЕРЖНЕЙ В ГРУНТ | 2010 |
|
RU2443827C1 |
| Гидравлический домкрат, преимущественно для подъема автомобилей | 1959 |
|
SU132390A1 |
| ГИДРОПНЕВМАТИЧЕСКАЯ РЕССОРА РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 1995 |
|
RU2102640C1 |