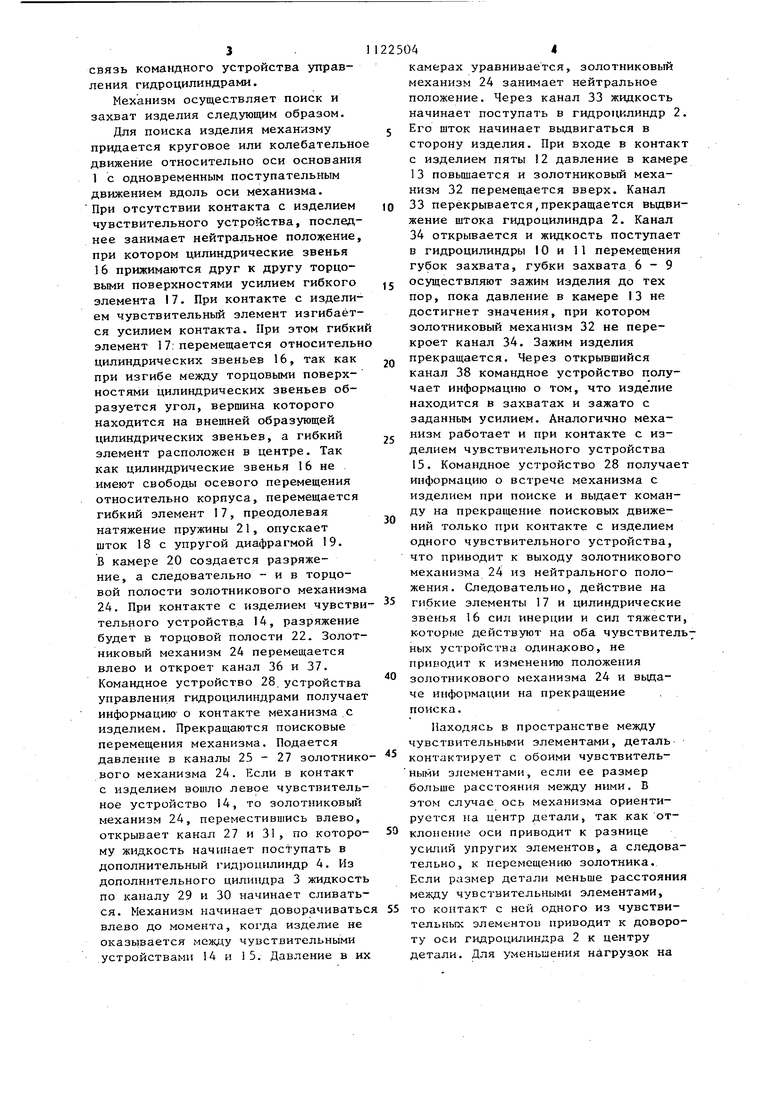
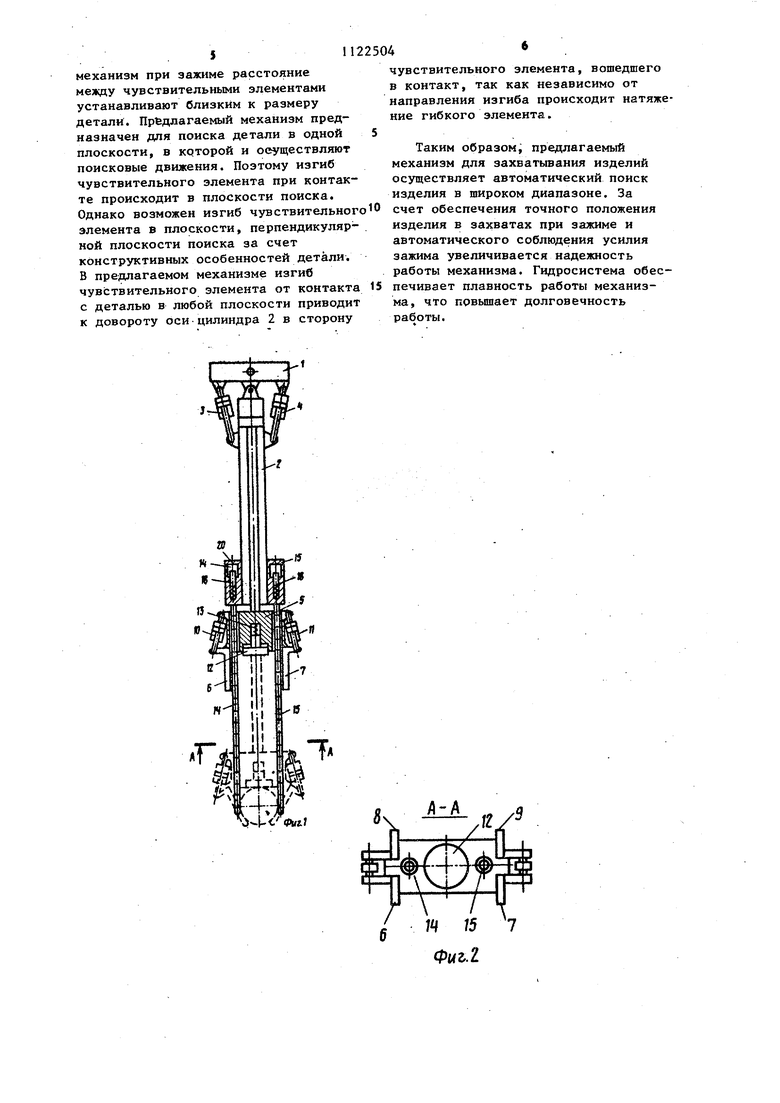
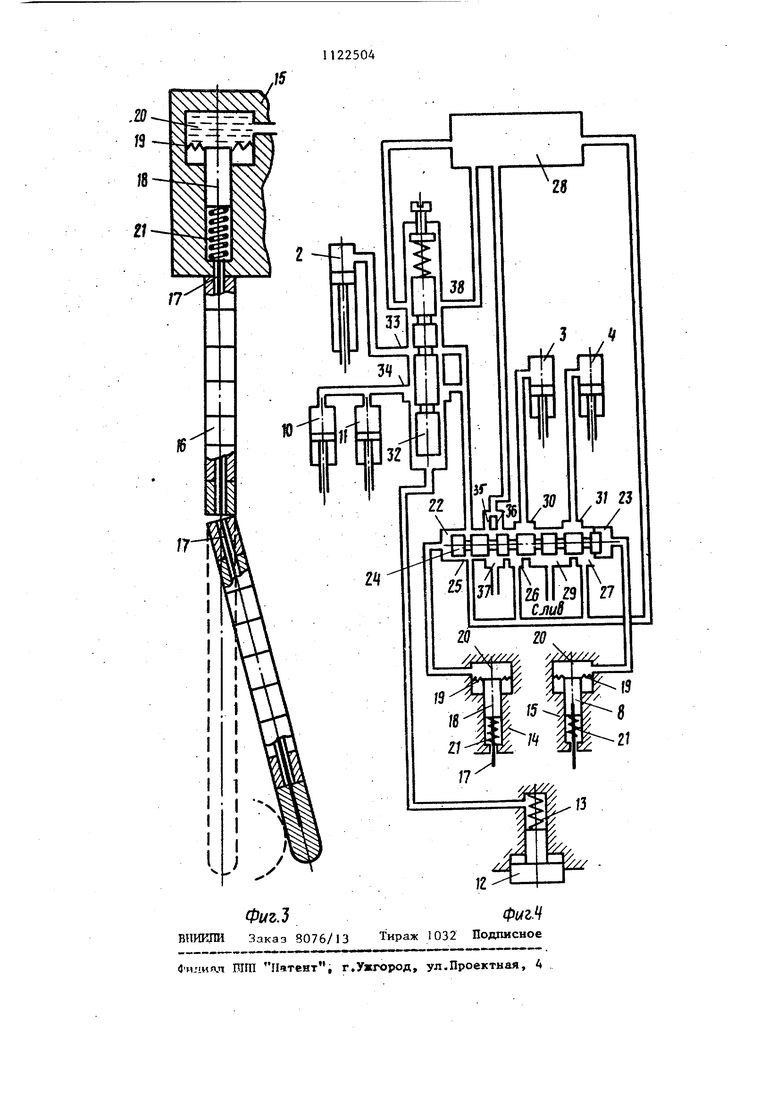
Изобретение относится к машиностроению, в частности к робототехнике. Известен механизм для захватывания изделий, содержащий основание, на котором смонтирована пята, имеющая гидравлическую камеру, и захват, имеющий губки с чувствительным устройствами, гидроцидандры перемещения пяты и губок захвата, дополнительные гидроцилиндры, шарнирно связанные с .основанием и с корпусом гидродилиндра перемещения пяты, на штоке которого шарнирно закреплены корпуса гидроцилиндров перемещения губок захвата, и устройство управления гидроцилиндрами выполненное в виде системы гидравлических золотниковых механизмовCl Недостатком известного механизма являются его низкие технологичес кие возможности, поскольку поиск изделия производится только в полос ограниченной шириной захвата в раскрытом положении. Цель изобретения - расширение технологических возможностей за сче расширения зоны поиска изделия. Эта цель достигается тем, что в механизме для захватывания издел содержащем основание, на котором смонтирована пята, имеющая гидравл ческую камеру, и захват, имеющий губки с чувствительными устройствам гидроцилиндры перемещения пяты и губок захвата, дополнительные гидр цилиндры, шарнирно связанные с основанием и с корпусом гидроцилинд ра перемещения пяты, на штоке кото рого шарнирно закреплены корпуса гидроцилиндров перемещения губок захвата, и устройство управления гидроцилиндрами, выполненное в вид системы гидравлических золотниковых механизмов, и командного устройств чувствительные устройства губок захвата установлены на корпусе гид цилиндра перемещения пяты и выполн ны каждый в виде цилиндрических звеньев, имеющих центральные отвер стия и размещенный в них гибкий элемент, один конец которого жестко связан с последним цилиндри ческим звеном чувствительного устройства губки, а другой - гидравли чески связан с золотниковым механизмом управления дополнительными цилиндрами. 42 На фиг. 1 изображен предлагаемый механизм для захватьшания изделий, разрез; на фиг. 2 - разрез А-А на фиг. I; на фиг. 3 - чувствительное устройство; на фиг. 4 - схема гидросистемы. Механизм для захватывания изделий состоит из основания 1 с шарнирно закрепленным на нем корпусом гидроцилиндра 2. На основании 1 также шарнирно закреплены корпуса дополнительных гидроцилиндров 3 и 4, штоки которых шарнирно закреплены на корпусе гидроцилиндра 2. На штоке гидроцилиндра 2 жестко смонтирован корпус 5 захвата с губками 6 - 9 и гидроцилиндрами 10 и II перемещения губок захвата. В корпусе 5 захвата установлена пята 12, подпружиненная относительно корпуса. В корпусе 5 захвата под пятой 12 выполнена камера 13, заполненная жидкостью. На корпусе гидроцилиндра 2 установлены два чувствительных устройства 14 и 15 губок захвата и выполнены каждый в виде цилиндрических звень- : ев 16, имеющих центральные отверстия и размещенный в них гибкий элемент 17. Один конец гибкого элемента 17 жестко связан с последним звеном чувствительного устройства, а другой соединен со штоком 18, который снабжен упругой диафрагмой 19. Диафрагма I9 и корпус образуют камеру 20, заполненную жидкостью. Натяг гибкого элемента 17 производится пружиной 21. Камеры чувствительных устройств 20 гидравлически связаны с торцовыми полостями 22 и 23 золотникового механизма 24, каналы 25-27 соединены с командным устройством 28 устройства управления гидроцилиндрами, а канал 29 - с системой слива. Каналы 30 и 31 связаны с дополнительными гидроцилиндрами 3 и 4. Камера 13 связана с торцовой полостью золотникового механизма 32, с каналом 33 которого связан гидроцилиндр 2, а с каналом 34 гидроцилиндры 10 и II перемещения губок захватов. Каналы 33 и 34 связаны с каналом 25 золотникового механизма 24. Командное устройство 28 устройства управления гидроцилиндрами связано с каналами 35 и 36 золотникового механизма 24, канал 37 которого связан с системой давления. Через канал 38 золотникового механизма 32 осуществляется обратная
вязь командного устройства управения гидроцилиндрами.
Механизм осуществляет поиск и захват изделия следующим образом.
Для поиска изделия механизму придается круговое или колебательное вижение относительно оси основания 1 с одновременным поступательным движением вдоль оси механизма. При отсутствии контакта с изделием чувствительного устройства, последнее занимает нейтральное положение, при котором цилиндрические звенья 16 прижимаются друг к другу торцовыми поверхностями усилием гибкого элемента I7. При контакте с изделием чувствительный элемент изгибается усилием контакта. При этом гибкий элемент 17: перемещается относительно цилиндрических звеньев 16, так как при изгибе между торцовыми поверхностями цилиндрических звеньев образуется угол, вершина которого находится на внешней образующей цилиндрических звеньев, а гибкий элемент расположен в центре. Так как цилиндрические звенья 16 не имеют свободы осевого перемещения относительно корпуса, перемещается гибкий элемент 17, преодолевая натяжение пружины 21, опускает шток 18 с упругой диафрагмой 19. Б камере 20 создается разряжение, а следовательно - и в торцовой полости золотникового механизма 24. При контакте с изделием чувствительного устройства 14, разряжение будет в торцовой полости 22. Золотниковый механизм 24 перемещается влево и откроет канал 36 и 37. Командное устройство 28 устройства управления гидроцилиндрами получает информацию о контакте механизма с изделием. Прекращаются поисковые перемещения механизма. Подается давление в каналы 25-27 золотникового механизма 24. Если в контакт с изделием вошло левое чувствительное устройство 14, то золотниковый механизм 24, переместившись влево, открывает канал 27 и 31, по которому жидкость начинает поступать в дополнительный гидроцилиндр 4. Из дополнительного цилиндра 3 жидкость по каналу 29 и 30 начинает сливаться. Механизм начинает доворачиваться влево до момента, когда изделие не оказывается между чувствительными устройствами 14 и 15. Давление в их
225044
камерах уравнивается, золотниковый механизм 24 занимает нейтральное положение. Через канал 33 жидкость начинает поступать в гидроцилиндр 2. 5 Его шток начинает выдвигаться в
сторону изделия. При входе в контакт с изделием пяты )2 давление в камере 13 повышается и золотниковый механизм 32 перемещается вверх. Канал 10 33 перекрывается,прекращается выдвижение штока гидроцилиндра 2. Канал 34 открывается и жидкость поступает в гидроцилиндры 10 и 11 перемещения губок захвата, губки захвата 6 - 9 5 осуществляют зажим изделия до тех пор, пока давление в камере 13 не достигнет значения, при котором золотниковый механизм 32 не перекроет канал 34. Зажим изделия прекращается. Через открывшийся канал 38 командное устройство получает информацию о том, что изделие находится в захватах и зажато с заданным усилием. Аналогично механизм работает и при контакте с изделием чувствительного устройства 15. Командное устройство 28 получает информацию о встрече механизма с изделием при поиске и выдает команду на прекращение поисковых движений только при контакте с изделием одного чувствительного устройства, что приводит к выходу золотникового механизма 24 из нейтрального положения. Следовательно, действие на гибкие элементы 17 и цилиндрические звенья 16 сил инерции и сил тяжести, которые действуют на оба чувствительу ных устройства одинадсово, не приводит к изменению положения О золотникового механизма 24 и выдаче информации на прекращение поиска.
Находясь в пространстве между чувствительными элементами, деталь контактирует с обоими чувствительными элементами, если ее размер больше расстояния между ними. В этом случае ось механизма ориентируется па центр детали, так как отклонение оси приводит к разнице усилий упругих элементов, а следовательно, к перемещению золотника. Если размер детали меньше расстояния между чувствительными элементами, 5 то контакт с ней одного из чувствительных элементов приводит к довороту оси гидроцилиндра 2 к центру детали. Для уменьшения нагрузок на механизм при зажиме расстояние между чувствительными элементами устанавливают близким к размеру детали. Предлагаемый механизм предназначен для поиска детали в одной плоскости, в которой и осуществляют поисковые движения. Поэтому изгиб чувствительного элемента при контакте происходит в плоскости поиска. Однако возможен изгиб чувствительног
элемента в плоскости, перпендикулярной плоскости поиска за счет конструктивных особенностей детали. В предлагаемом механизме изгиб чувствительного элемента от контакта с деталью в любой плоскости приводит к довороту оси цилиндра 2 в сторону
изделия в захватах при зажиме и автоматического соблюдения усилия зажима увеличивается надежность работы механизма. Гидросистема обеспечивает плавность работы механизма, что повьш1ает долговечность работы. чувствительного элемента, вошедшего в контакт, так как независимо от направления изгиба происходит натяжение гибкого элемента. Таким образом, предлагаемый механизм для захватывания изделий осуществляет автоматический поиск изделия в широком диапазоне. За счет обеспечения точного положения
Л-А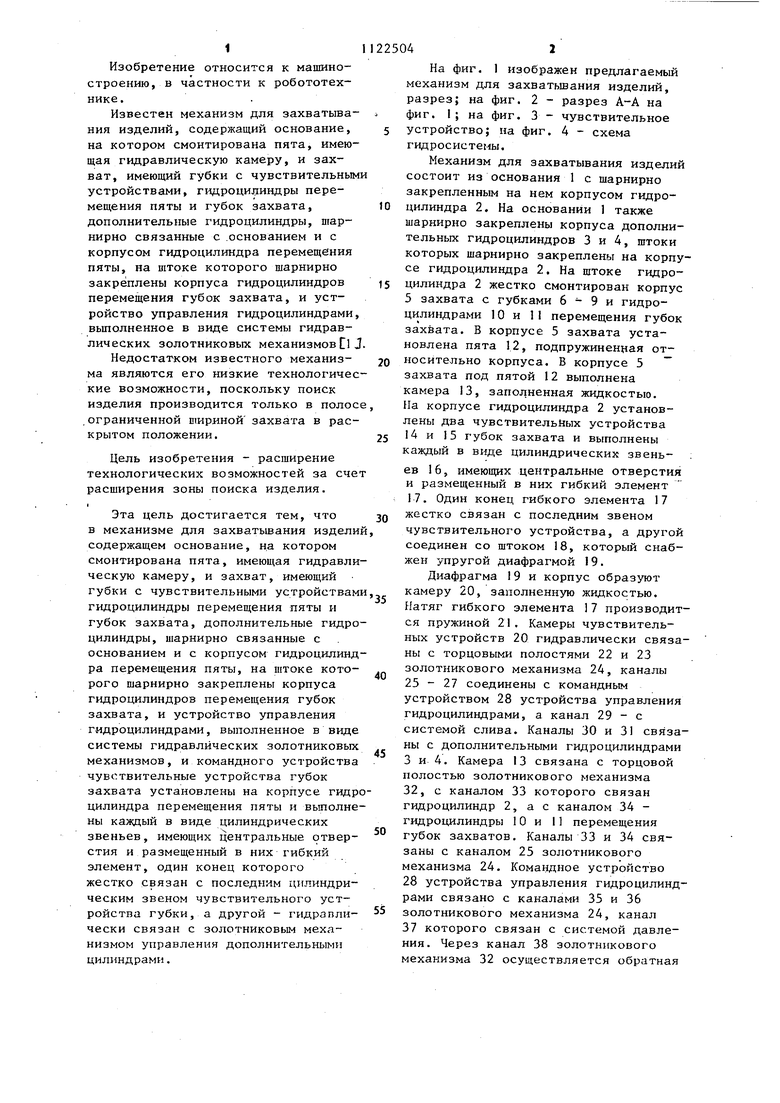
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм для захватывания изделий | 1982 |
|
SU1013265A1 |
| Механизм для захватывания изделий | 1981 |
|
SU975390A1 |
| УСТРОЙСТВО ДЛЯ ИЗВЛЕЧЕНИЯ ОБЪЕКТОВ ИЗ КАНАЛОВ | 2008 |
|
RU2407632C2 |
| Запястье манипулятора | 1987 |
|
SU1433796A1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ЗАГОТОВОК В ПРЕСС | 1993 |
|
RU2063287C1 |
| Захват манипулятора | 1990 |
|
SU1779582A1 |
| Исполнительный орган промышленного робота | 1978 |
|
SU768633A1 |
| УСТРОЙСТВО ДЛЯ СОЗДАНИЯ НАТЯЖЕНИЯ ПРИ ПРЕССОВАНИИ МЕТАЛЛОВ | 2005 |
|
RU2278758C1 |
| УСТРОЙСТВО ДЛЯ ИЗВЛЕЧЕНИЯ ИЗ ОСНОВАНИЯ ЖЕЛЕЗОБЕТОННЫХ ОПОР КОНТАКТНОЙ СЕТИ ЖЕЛЕЗНОЙ ДОРОГИ | 2000 |
|
RU2177525C2 |
| УСТРОЙСТВО ДЛЯ РАЗБОРКИ ПАКЕТА ТРУБ | 1991 |
|
RU2035369C1 |
МЕХАНИЗМ ДЛЯ ЗАХВАТЫВАНИЯ ИЗДЕЛИЙ, содержащий основание, на квтором смонтирована пята, имеющая гидравлическую камеру, и захват, имеющий губки с чувствительньми устройствами, гидроцилиндры перемещения пяты и губок захвата, дополнительные гидроцилиндры, шарнирно связанные с основанием и с корпусом гидроцилиндра перемещения пяты. на штоке которого ша,рнирно закреплены корпуса гидроцилиндров перемещения губок захвата, и устройство управления гидроцилиндрами, выполненное в виде системы гидравлических золотниковых механизмов и командного устройства, отличающийся тем, что, с целью расширения технологических возможностей, за счет расп1ирения зоны поиска изделия, чувствительные устройств-а губок захвата установлены на корпусе гидроцилиндра перемещения пяты и выполнены каждый в виде цилиндрических звеньев, имеющих центральные отверстия и размещенный в них гибкий элемент, (Л один конец которого жестко связан с последним цилиндрическим звеном чувствительного устройства губки, а другой - гидравлически связан с золотниковым механизмом управления дополнительными цилиндрами.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Механизм для захватывания изделий | 1981 |
|
SU975390A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| / | |||
