12 8
10
NU
СО 00
со
О5
1У7
15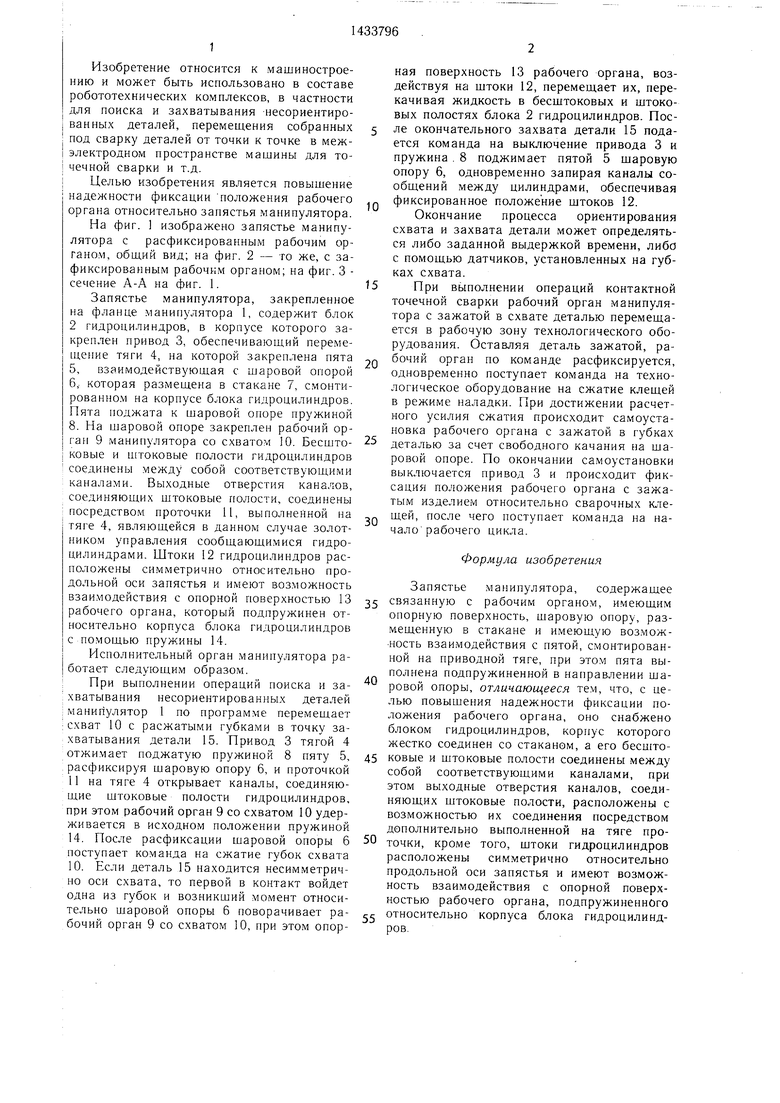
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватная головка | 1988 |
|
SU1537527A1 |
| Манипулятор | 1987 |
|
SU1444140A1 |
| Податливое сборочное устройство | 1989 |
|
SU1691095A1 |
| Манипулятор для кладки стен из штучных элементов | 1989 |
|
SU1712561A1 |
| Манипулятор | 1983 |
|
SU1098791A1 |
| Механизм для захватывания изделий | 1982 |
|
SU1013265A1 |
| Манипулятор | 1984 |
|
SU1234178A1 |
| Манипулятор | 1980 |
|
SU874329A1 |
| Схват манипулятора | 1985 |
|
SU1294605A1 |
| Манипулятор для замены погружного стакана на слябовой машине непрерывного литья заготовок | 2016 |
|
RU2639089C2 |
Изобретение относится к .машиностроению и может быть использовано в составе робототехнических комплексов. Цель изобретения - повышение надежности фиксации положения рабочего органа относительно запястья манипулятора после адаптации первого относительно несориентированной детали. При включении привода 3 тяга 4 отжимает поджатую пружину 8, пяту 5, освобождая шаровую опору 6, жестко связанную с рабочим органом 9, одновременно открывая каналы сообндений блока 2 гидроцилиндров, тем самым расфикси- руется качающаяся подвеска рабочего органа со схватом 10. Схват 10, зажимая несориентированную деталь 15, изменяет пространственное положение рабочего органа 9, который в свою очередь, воздействуя па игроки 11, перекачивает жидкость в бесшто- ковых и штоковых полостях гидроцилинд- ров. После выключения привода 3 пружина 8 зажимает шаровую опору 6 в стакане 7, а тяга 4 запирает каналы сообщений блока гидроцилиндров, надежно фиксируя положение рабочего органа относительно запястья манипулятора. 3 ил. (Л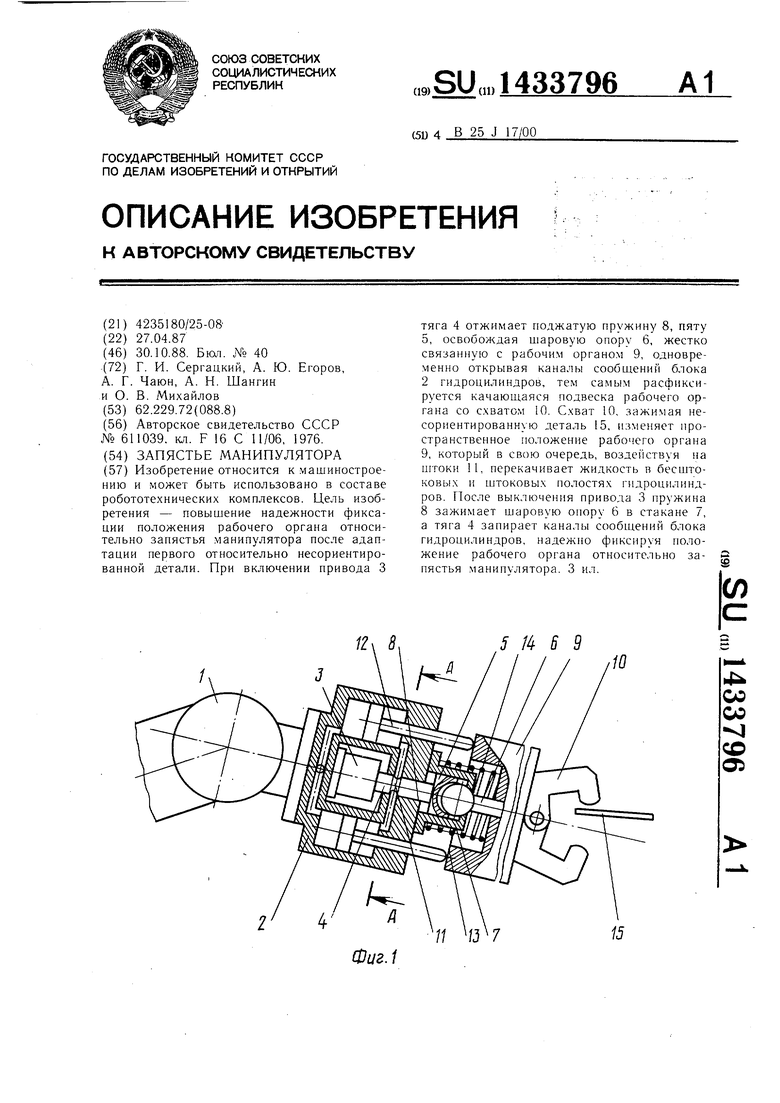
Фиг.1
Изобретение относится к машиностроению и может быть иснользовано в составе робототехнических комнлексов, в частности для поиска и захватывания -несориентиро- ванных деталей, перемеш,ения собранных под сварку деталей от точки к точке в межэлектродном пространстве машины для точечной сварки и т.д.
Целью изобретения является повышение надежности фиксации положения рабочего органа относительно запястья манипулятора.
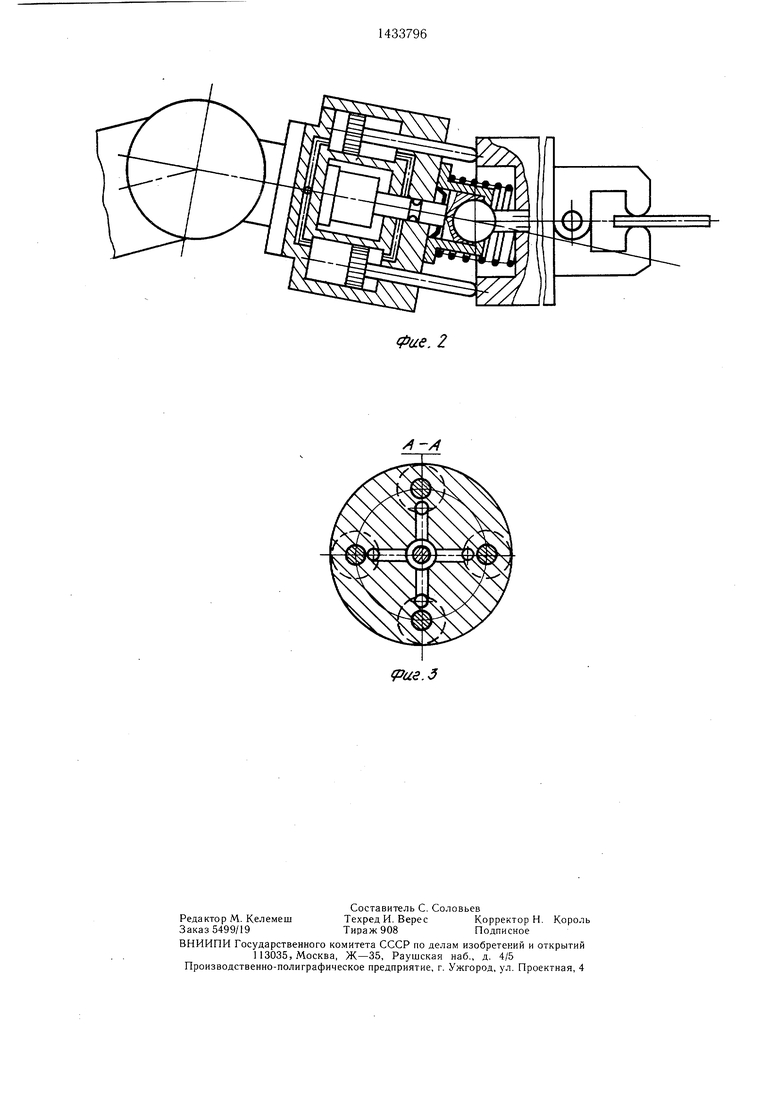
На фиг. 1 изображено запястье манипулятора с расфиксированны.м рабочим органом, обш,ий вид; на фиг. 2 - то же, с зафиксированным рабочим органом; на фиг. 3 - сечение А-А на фиг. 1.
Запястье манипулятора, закрепленное на фланце манипулятора 1, содержит блок 2 гидроцилиндров, в корпусе которого закреплен привод 3, обеспечивающий перемещение тяги 4, на которой закреплена пята
5,взаимодействующая с шаровой опорой
6,которая размещена в стакане 7, смонти- рованно.м на корпусе блока гидроцилиндров. Пята поджата к шаровой опоре пружиной 8. На шаровой опоре закреплен рабочий орI ran 9 манипулятора со схватом 10. Бесшто- I ковые и щтоковые полости гидроцилиндров соединены между собой соответствующими каналами. Выходные отверстия каналов, соединяющих щтоковые полости, соединены ; посредством проточки 11, выполненной на I тяге 4, являющейся в данном случае золотником управления сообщающимися гидроцилиндрами. Штоки 12 гидроцилиндров расположены си.мметрично относительно продольной оси запястья и имеют возможность взаимодействия с опорной поверхностью 13 рабочего органа, который подпружинен относительно корпуса блока гидроцилиндров i с помощью пружины 14. I Исполнительный орган манипулятора ра- I ботает следующим образом. ; При выполнении операций поиска и за- хватывания несориентированных деталей ; манипулятор 1 по программе перемещает ; схват 10 с расжатыми губками в точку захватывания детали 15. Привод 3 тягой 4 отжимает поджатую пружиной 8 пяту 5, расфиксируя шаровую опору 6, и проточкой 11 на тяге 4 открывает кана.ты, соединяю- цл.ие штоковые полости гидроцилиндров, при этом рабочий орган 9 со схватом 10 удерживается в исходном положении пружиной 14. После расфиксации шаровой опоры 6 поступает команда на сжатие губок схвата 10. Если деталь 15 находится несимметрично оси схвата, то первой в контакт войдет ОлТ,на из губок и возникший момент относительно шаровой опоры 6 поворачивает рабочий орган 9 со схватом 10, при этом опорная поверхность 13 рабочего органа, воздействуя на штоки 12, перемещает их, перекачивая жидкость в бесштоковых и штоко- вых полостях блока 2 гидроцилиндров. После окончательного захвата детали 15 подается команда на выключение привода 3 и пружина . 8 поджимает пятой 5 шаровую опору 6, одновременно запирая каналы сообщений между цилиндрами, обеспечивая
,, фиксированное положение штоков 12.
Окончание процесса ориентирования схвата и захвата детали может определяться либо заданной выдержкой времени, либо с помощью датчиков, установленных на губках схвата.
5При вьшолнении операций контактной
точечной сварки рабочий орган манипулятора с зажатой в схвате деталью перемещается в рабочую зону технологического оборудования. Оставляя деталь зажатой, ра0 бочий орган по команде расфиксируется, одновременно поступает команда на технологическое оборудование на сжатие клещей в режиме наладки. При достижении расчетного усилия сжатия происходит самоустановка рабочего органа с зажатой в губках
5 деталью за счет свободного качания на шаровой опоре. По окончании самоустановки выключается привод 3 и происходит фиксация положения рабочего органа с зажатым изделием относительно сварочных щей, после чего поступает команда на на0
чало рабочего цикла.
Формула изобретения
Запястье манипулятора, содержащее
связанную с рабочим органом, имеющим опорную поверхность, шаровую опору, размещенную в стакане и имеющую возмож- ность взаимодействия с пятой, смонтированной на приводной тяге, при этом пята выполнена подпружиненной в направлении шаровой опоры, отличающееся тем, что, с целью повышения надежности фиксации положения рабочего органа, оно снабжено блоком гидроцилиндров, корпус которого жестко соединен со стаканом, а его бесштоковые и штоковые полости соединены между собой соответствующими каналами, при этом выходные отверстия каналов, соединяющих штоковые полости, расположены с возможностью их соединения посредством дополнительно выполненной на тяге проточки, кроме того, штоки гидроцилиндров расположены симметрично относительно продольной оси запястья и имеют возможность взаимодействия с опорной поверхностью рабочего органа, подпружиненного
относительно корпуса блока гидроцилиндров.
Фае. 2
ipue. S
| Сферический шарнир | 1976 |
|
SU611039A1 |
| кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
