со ю
а
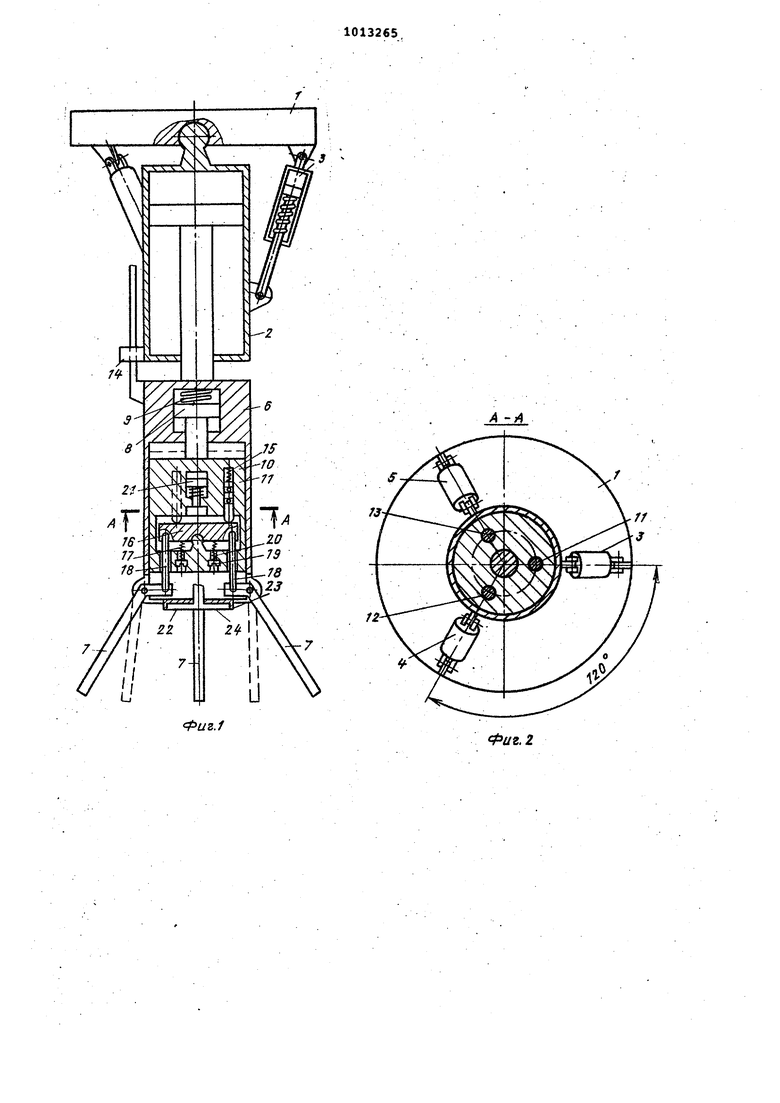
СП ,. Изобретение относится к машиностроению, а именно к механизмам для захватывания и транспортировки изделий к обрабатывающему оборудованию. Известен механизм для захватывани изделий, содержащий основание, на ко тором шарнирно установлены гидроцилиндр перемещения захвата и гидроцилиндры поворота, штоки которых шарни но связаны с корпусом гидроцилиндра перемещения захва а и золотники упГравления этими гидроцилиндрами,при это захват имеет силовой гидроцилиндр , привода губок и пяту, выполненную в виде заполненной жидкостью камеры с диафраг 1ой и связанную с торцовой no лостью .золотника управления гидроцилиндром перемещения захвата El. Недостатком известного устройства является то, что механизм обеспечива ет поиск изделий, несориентированных .относительно его оси только в одной плоскости. Целью изобретения является расширение технологических возможностей з рчет осуществления поиска изделий, |Несориентированных относительно его оси в пространстве. Цель достигается тем, что механиз для захватывания изделий, содержащий основание, на котором шарнирно установлены гидроцилиндр перемещения захвата и гидроцилиндры поворота, шток которых шарнирно связаны с корпусом гидроцилиндра перемещения захвата, и золотники управления этими гидроци.линдрами, при этом захват имеет сило вой гидроцилиндр привода губок и пят выполненную в виде заполненной жидко тью Камеры с диафрагмой и связанную торцовой полостью золотника управления гидроцилиндром перемещения захва та, снабжен фиксирующим гидроцилиндром и установленным на штоке силового гидроцилиндра привода губок полым пол зуном, имеющим внутри шаровую опору и установленную на этой опоре шайбу, причем шток фиксирующего гидроцилиндра и золотники управления размещены в ползуне с возможностью взармодейстаия с шайбой, фиксирующий и гидроцилиндр гидравлически связан с золотником управления гидроцилиндром перемещения захвата, а шайба шарнирно связана, с губками захвата. На фиг.1 изображен механизм для захватывания изделий; на фиг;2 - разрез А-А на фиг.1; на фиг.3 - гидравлическая система механизма. Механизм для захватывания изделий состоит из основания 1, на котором шарнирно закреплены гидроцилиндр 2 перемещения и три гидроцилиндра 3-5 поворота, штоки которых шарнирно соединены с корпусом гидроцилиндра 2 перемещения. Гидроцилиндры 3-5 размещены под углом 12О относительно друг друга. На штоке гидроцилиндра -2 перемещения разметен захват 6, на корпуce которого шарнирно установлены губки 7. В корпусе захвата 6 размещен силовой гидроцилиндр 8 с пружиной 9, на щтоке которого установлен полый ползун 10, в котором размещены три золотника 11-13, которые попарно с гидроцилиндрами 3-5 поворота расположены в одной плоскости.Корпус захвата б удерживается от поворота фиксирующими устройством 14. Золотники 11-13 пружинами 15 поджимаются к качающейся шайбе 16, установленной на шаровой опоре 17. Качающаяся шайба 16 шарнирно связана с губками 7 тягами 18. Винты 19 с пружинами 20 служат для регулировки качающейся шайбы 16. В ползуне 10 размещен фиксирующий гидроцилиндр 21. На корпусе захвата 6 установлена пйта 22, состоящая из обойкйл 23 и упругой диафрагмл 24, полость, образованная ими, заполнена жидкостью и гидравлически связана с торцом золотника 25. Полость гидроцилиндра 2 связана через каналы 26-28 . золотников 11-13 и канал 29 золотника 25 с командным устройством 30. Ксшдый из гидроцилиндров 3-5 поворота связан с соответствующим золотником 11-13. Так гидроцилиндр 3 связан с каналом 31 золотника 11, цилиндр 4с каналом 32 золотника 12, цилиндр 5с каналом 33 золотника 13. Каналы 3436 золотников 11-13 связаны с командным устройством 30, а каналы 37-39 с системой слива. Полость силового гидроцилиндра 8 соединена через каналы 40-42 и канал 43 золотника 25 - с командным устройством 30. Полость фиксирующего гидроцилиндра 21 соединена с командным устройством 30 через ка нал 44. Винт 45 с пружиной установлен в торцовой части золотника 25 и предназначен для регулировки усилия захвата. Механизм для захватывания изделий работает следующим образом. С командного устройства 30 давление подается в гидроцилиндр перемещения через канал золотника 25 и каналы 26-28 золотников 11-13. Шток цилиндра начинает выдвигаться. Если изделие находится в стороне от оси механизма, то первым в контакт с ним войдет одна из губок 7 (количество губок 7 и их конфигурация могут быть различными, обеспечивеиощими надежный захват изделия). Усилие контакта заставляет повернуться одну из губок 7 вокруг своей оси, которая через тягу 18 выводит качающуюся шайбу 16 из нейтрального положения. Взаимодействующие с шайбой 16, золотники 11-13 . зменяют свое положение. Например, если в контакт с изделием вступит правая губка, то отклонившись вправо, через тягу 18 она опустит правую часть шайбы 16, повернув е на шаровой опоре 17. Следовательно, золотник 11 опустится, а золотники 12 и 13 поднимутся. Прекращается выдвижение штока гидроцилиндра 2, так как 26-28 перекрыт. Золотник 11 соединяет через канал 31 и 37 полость гидроцилиндра поворота 3с системой слива,; а в полости цилиндров 4 и 5 поступает жидкость .по каналам 35-32 и ЗбгЗЗ. Штоки этих гидроцилиндров выдвиггиотся и доворачивают механизм в сторону изделия. Губка 7 выходит из контакта с изделием, шайба 16 занимает нейтральное положение. Золотники 11-13 также занимают нейтральное положение, продолжается выдвижение штока гидроцилинщ а 2 до контакта с изделием какой-либо другой губки 7. Эти циклы повторяются до момента контакта изделия с пятой 22. При контакте в камере пяты 22 возникаетдавление, которое передается в торцовую полость золотника 25, который, переместившись вверх, перекроет канал 29, в результате чего прекращается выдвижение штока гихФоцилиндра 2. Открывается канал 43, и жидкость начинает поступать в приводной цилиндр 8 через каналы 40-42 золотников 11-13. BJTOK гидроцилиндра 8 втягивается, поднимая ползун 10. Через шайбу 16 и тяги 18 движение передается на губки 7, которые начинают захват изделия. Если
при захвате одна из губок 7 вследствне различных причин, например из-за несимметричности изделия, создает большее усилие, то шайба 16 отходит от нейтрального положения, изменяется положение золотников 11-13. Ось механизма поворачивается в сторону большего усилия. При этом подача жид-. кости в силовой гидроцилиндр 8 прекращается, так как канал 40-42 перекрыт. Захват изделия будет продолжено, как только усилие зажима Н4 всех губках уравняется и шайба 16 займет нейтральное положение. При достижении расчетного давления в пяты от усилия зажима изделия губками 7 золотник 25 открывает канал 44, жидкость поступает в гидроцилиндр 21 фиксации, и его шток фиксирует шайбу 16. ie нейтральном положении. Механизм готов к перемещению изделия. Открывшийся кан.ал 46 передает информацию об этом в. командное устройство, по сигналам которого производится транспортировка изделия.
Механизм для захватывания изделий обеспечивает автоматический поиск и захват изделий, не находящихся по оси механизма в пространстве, путем корректировки оси механизма. Механизм обеспечивает захват изделия с автоматической регулировкой усилий зажима каждой губкой захвата.
Pus.f
А -А
Фиг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм для захватывания изделий | 1982 |
|
SU1122504A1 |
| Механизм для захватывания изделий | 1981 |
|
SU975390A1 |
| Устройство для образования анкера на арматурном стержне | 1987 |
|
SU1470905A1 |
| Автомат для сборки деталей запрессовкой | 1981 |
|
SU1092031A1 |
| Модуль для автоматизированной листовой штамповки | 1989 |
|
SU1708477A1 |
| УСТРОЙСТВО ДЛЯ РАЗБОРКИ ПАКЕТА ТРУБ | 1991 |
|
RU2035369C1 |
| Поворотный зажимной патрон | 1988 |
|
SU1569094A1 |
| Автоматизированный технологический комплекс для прессования изделий из порошков | 1991 |
|
SU1801048A3 |
| Запястье манипулятора | 1987 |
|
SU1433796A1 |
| УСТРОЙСТВО ДЛЯ СОЗДАНИЯ НАТЯЖЕНИЯ ПРИ ПРЕССОВАНИИ МЕТАЛЛОВ | 2005 |
|
RU2278758C1 |

МЕХАНИЗМ ДЛЯ ЗАХВАТЫВАНИЯ ИЗДЕЛИЙ, содержащий основание, на котором шарнирно установлены гидроцилиндр перемещения захвата и гидроцилиндры поворота, штоки которых шарнирно связаны с корпусам гидроцилинд.ра перемещения захвата, и золотники управления этими гидроцилиндрами, при этом захват имеет силовой гидроцилиндр привода губок и пяту, выполненную в виде заполненной жидкостью камеры с диафрагмой и связанную с торцовой полостью золотника управления гидроцилиндром перемещения захвата, отличающийся темг что,с целью расширения технологических воз-, можностей путем обеспечения поиска и захвата деталей в пространстве, он снабжен фиксирующим гидроцилиндром и установленным на штоке силового гидроцилиндра привода губок полым ползуном, имеющим внутри шаровую опору и установленную на этой опоре шайбу, причем шток фиксирующего гидроцилиндра и золотники управления размещены в ползуне с возможностью взаимодействия с шайбой-, при этом фиксируюсций гидроцилиндр гидравлически связан с (Л золотником управления гидроцилиндром перемещения захвата, а шайба ыарнирно связана с губками захвата. 
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР По заявке 3290907/25-08, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
