(54) РУЧНОЙ. ДУБЛЕР МЕХАНИЧЕСКОГО ПРИВОДА
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод с ручным дублером | 1982 |
|
SU1142685A1 |
| Ручной дублер механического привода | 1980 |
|
SU991104A1 |
| РУЧНОЙ ДУБЛЕР МЕХАНИЧЕСКОГО ПРИВОДА | 1972 |
|
SU425013A1 |
| ЭЛЕКТРОПРИВОД С РУЧНЫМ ДУБЛЕРОМ | 2002 |
|
RU2239116C2 |
| Электропривод с ручным дублером | 1986 |
|
SU1421944A1 |
| ПРИВОД С КОМБИНИРОВАННЫМ УПРАВЛЕНИЕМ ОТ ЭЛЕКТРОДВИГАТЕЛЯ И ВРУЧНУЮ | 2007 |
|
RU2332607C1 |
| Ручной дублер электрического привода | 1984 |
|
SU1168764A1 |
| ЭЛЕКТРОПРИВОД ЗАПОРНОЙ АРМАТУРЫ | 2008 |
|
RU2366848C1 |
| ЭЛЕКТРОПРИВОД С РУЧНЫМ ДУБЛЕРОМ | 2006 |
|
RU2323380C2 |
| Электропривод с ручным дублером | 1985 |
|
SU1267092A1 |
1
Изобретение относится к мадганостроеаию и может быть использовано в приводах различной арматуры.
Известен ручной дублер механического привода, содержащий корпус, маховик, подпружиненный в осевом направлении элемент, основную и дополнительные кулачковые втулки, ведущую и ведомую шестерни, втулку с криволинейными кулачками, ведущий вал. Механический привод от маховика и привод от электродвигателя расположены рядом параллельно, а управляемая арматура под приводом С 1 .
Недостатком известной конструкции я&ляется ее сложность и затрудненность в обслуживании при эксплуатации.
Цель изобретения - улучшение эксплуатационных качеств привода.- .
Указанная цель достигается тем, что в ручном дублере механического привода, содержащем корпус, маховик, подпружиненньтй в осевом направлении элемент, основную и дополнительную кулачковые втулки, ведущую и ведомую шестерни, втулку с криволинейными кулачками, ведущий вал, ведущая шестерня установлена соооно с подпружиненным элементом, шарни{ но связана C.JJKM при помощи втулки с буртами и имеет на обоих торцах кулачки, одни из которых взаимодействуют с кулачками основной кулачковой втулки, а другие -с дополнительной, и основная
10 кулачковая втулка снабжена тормозным фрикционным элементом, взаимодействук щим с цилиндрической поверхностью корпуса.
15
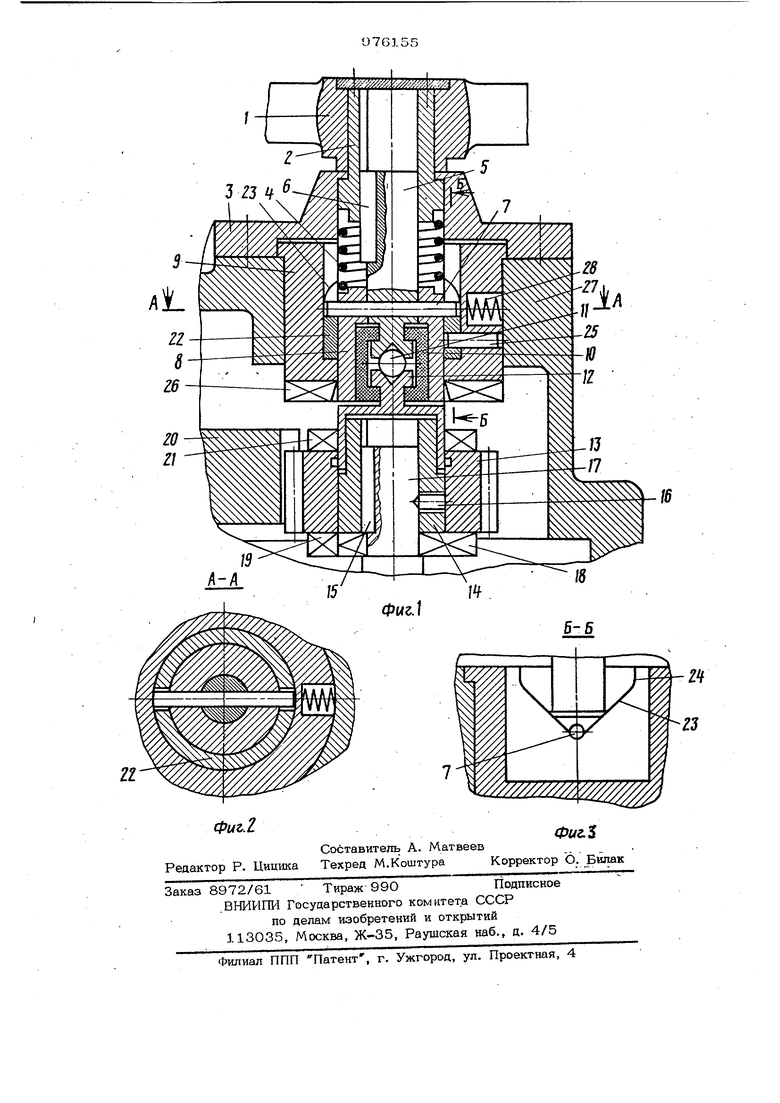
На фиг. 1 представлено устройство, общий вид; на фиг. 2 - разрез А-А ва фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1.
Маховик 1 жестко посажен на квадрат втулки 2, установленной в расточке крын20ки 3. Втулка 2 соединяется с подпружшиенным пружиной 4 элементом 5 с помощью подвижного шпоночного .соединения 6. Подпружиненный элемент 5 посредсгвом штифта 7 жестко связан с втулкой 8, размещенной в основной кулачковой втулке 9. В аксиальном направлении подпружиненный элемент 5 через втулку 10 с буртами, тело 11 качения, втулку 12 связан с ведущей шестерней
13,установленной на дополнительную кулачковую втулку 14. Дополнительная кулачковая втулка 14 с помощью шпо- . ночного соединения 15 и стопорного 16 жестко насажена на вал 17 электродвигателя (не показан),
Допрлнительная втулка 14 имеет кулачки 18, с помощью которых она может передавать вращение на щестерню 13 че- рез кулачки 19. Шестерня 13 находится в постоянном зацеплении с ведомой шестерней 20. На шестерне 13 выполнены также кулачки 21. В тужа 8 установлена во втулке 22, ймеюшей криволинейные кулачки (скосы) с наклонными 23 и прямыми 24 участками. Втулка 22 жестко связана с основной кулачковой втулкой 9 штифтом 25. На втулке 9 выполнены кулачки 26, кроме того, втулка 9 заторможена на корпус 27 тормозным фрикционным элементом 28.
При работе от электродвш-ателя вращение передается по кинематической цепи вал 17 двигателя, дополнительная втулка
14,кулачки 18, кулачки 19, шестерня 13, шестерня 2О и далее.
Ввиду того, что шестерня 13, втушса 12, тело 11 качения и подпружиненный элемент 5 установлены свободно и враще ние друг другу не передают, при работе устройства от электродаигателя вращение маховику 1 тоже не передается. При переходе на ручное управление вращение от маховика 1 через втулку 2 передается подпружиненному элементу 5. Вследствие взаимодействия щтифта 7 и наклонных участков 23 втулки 22 подпружиненный элемент 5 начинает перемещаться поступательно вверх, одновременно сжимая пру-45
жину 4. При атом подпружиненный элемент 5 через втулки 10 и 12 перемещает шестерню 13 аксиально вверх, одновременно кулачки 19 выходят из зацепления с кулачками 18, а рулачки 21 иходят в зацепление с кулачками2б кулачковой втулки 9. Одновременно штифт
7 входит в контакт с прямым участком 24 кулачка втулки 22, т.е. прекращается осевое перемещение подпружиненного элемента 5, а вместе с ним и шестерни 13.
При дальнейшем вращении маховика 1 преодолевается сила трения во фрикционном тормозном элементе 28, кула гковая втулка 9 получает вращательное движение и через кулачки 26 к 21. сообщает вращательное движение шестерни 13, ко торая, в свою очередь, вращает шестерню 20. Случайное включение электродвигателя безопасно для оператора, так как вращение на ручной дублер в этом.случае не передается. При снятии усилия с маховика 1 под действием пружин 4 все элементы вернутся в исходное положение
Использование описанного устройства позволит упростить конструтсцию ручного дублера, снизит трудоемкость его гоготовления и улучшит .условия его эксплуатации, благодаря соосному расположению ручного дублера и электродвигателя.
Формула изобретения
Ручной дублер механического привода, содержащий корпус, маховик, подпружиненный в осевом направлении элемент, основную и дополнительную кулачковые втулки, ведущую и ведомую шестерни, втулку с криволинейными кулачками, ведущий вал, отли.чающийся тем, что, с целью улучшения эксплуата- . ционныхкачеств, ведущая шестерня установлена соосно с подпружиненным элементом, шарнирно связана с ним при помощи втулки с буртами и имеет на обоих торцах кулачки, одни из которых взаимодействуют с кулачками основной кулачковой втулки, а другие - с дополнительной, и основная кулачковая втулка сна&взаимодействующим с цилиндрической поверхностью корпуса.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 761778, кл. F 16 К 31/05, 1978 (прототип). жена тормозным фрикционным элементом.
