(54 РУЧНОЙ ДУБЛЕР МЕХАНИЧЕСКОГО ПРИВОДА
| название | год | авторы | номер документа |
|---|---|---|---|
| Ручной дублер механического привода | 1981 |
|
SU976155A1 |
| ЭЛЕКТРОПРИВОД С РУЧНЫМ ДУБЛЕРОМ | 2006 |
|
RU2323380C2 |
| Электропривод с ручным дублером | 1982 |
|
SU1142685A1 |
| Ручной дублер электропривода | 1986 |
|
SU1390466A1 |
| РУЧНОЙ ДУБЛЕР МЕХАНИЧЕСКОГО ПРИВОДА | 1972 |
|
SU425013A1 |
| ЭЛЕКТРОПРИВОД | 1999 |
|
RU2154219C1 |
| Отключающий механизм | 1974 |
|
SU496403A1 |
| ПРИВОД С КОМБИНИРОВАННЫМ УПРАВЛЕНИЕМ ОТ ЭЛЕКТРОДВИГАТЕЛЯ И ВРУЧНУЮ | 2007 |
|
RU2332607C1 |
| Электропривод трубопроводной арматуры с ручным дублером | 2022 |
|
RU2797329C1 |
| Пневмопривод с ручным механическим дублером и гидродемпфером | 1986 |
|
SU1355824A1 |
Изобретение относится к машиностроению и может быть использовано, в частности, в станкостроении.
Известен ручной дублер механического привода, содержащий махрвик, связанный посредством кулачков .с одним концом подпружиненного в осевом направлении , ведущую и яме. ющую кулачки ведомую шестерни, приводные кулачки, взаимодействующие с кулачками ведомой шестерни, и выходной вал с установленной на нем подвижно в окружном направлении относительно ведомой шестерни втулкой, име.ющей радиальные пазы. Другой конец подпружиненного элемента выполнен прямоугольным, а приводные кулачки и кулачки ведомой шестерни имеют сложный профиль и ряд дополнительных промежуточных элементов l3.
Недостатком известного устройства является низкая надежность работы из-за сложности конструкции кулачкового переключающего механизма.
Цель изобретения - повшиение надежности и упрощение конструкции.
Поставленная цель, достигается тем, что в ручном дублере механического привода, содержащем маховик, связанный посредством кулачков с одним концом подпружиненного в осевом направлении злемента, ведущую и име ющую кулачки ведомую шестерни, приводные кулачки , взаимодействующие с кулачками ведомой шестерни, и вы-. ходной вал с установленной на нем подвижно в окружном направлении относительно ведомой шестерни втулкой, имеющей радиальные пазы, другой ко10нец подпружиненного злемента выполнен конусным и имеет пазы, в радиальных пазах втулки установлены и подпружинены к оси вьдходного вала приводные кулачки, взаимодействующие с пазами
ts подпружиненного элемента при выходе из зацепления с кулачками ведомой шестерни.
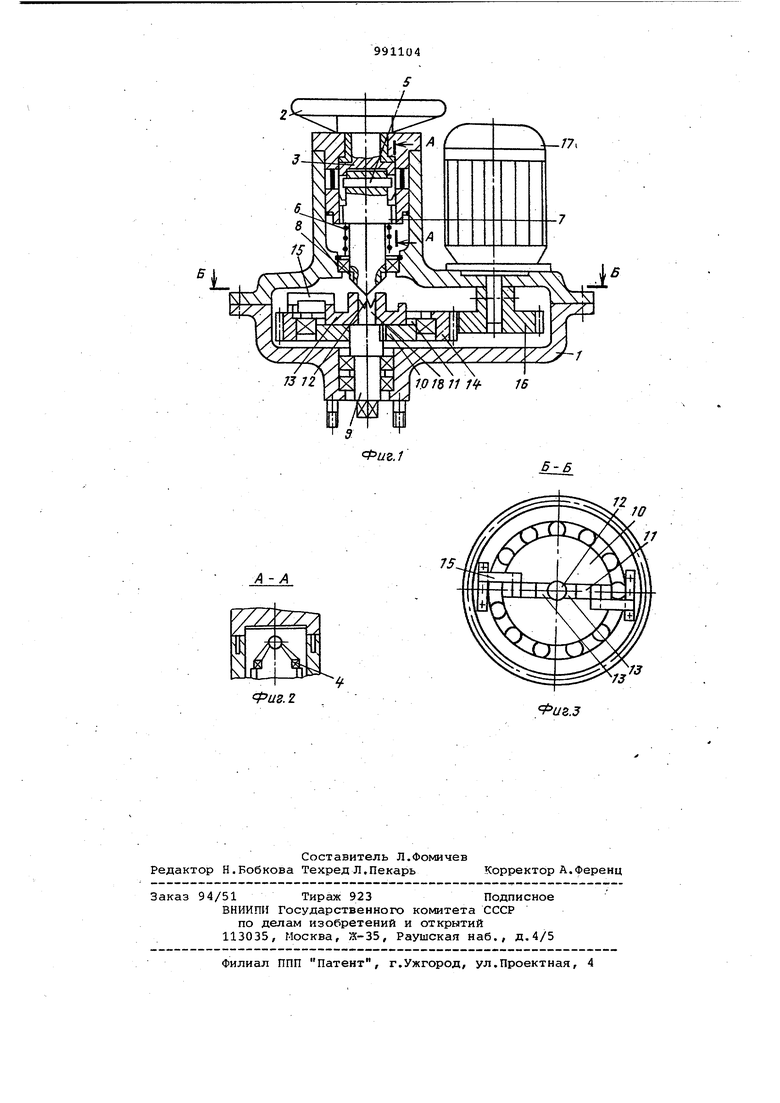
На фиг.1 показан ручной дублер,
20 разрез по осям ведущей и ведомой шестерен; на фиг.2 - разрез А-А на фиг.1, на фиг.З - разрез В-В на фиг.1..
Ручной дублер механического при25вода содержит корпус 1, в котором с возможностью вращения установлен маховик 2, жестко связанный .с валом 3, который через кулачки 4 и штифт 5 связан с верхним концом подпружи30ненного пружиной 6 элемента 7. Подпружиненный элемент 7 установлен в корпусе 1 с возможностью осевого перемещения и вращения, а его нижний конец выполнен конусным и снабжен пазами 8. В корпусе 1 с возможностью вращения установлен выходной вал 9, на котором жестко закреплена втулка 10 с радиальными пазами 11, в которых размещены подпружиненные к оси выходного вала 9 пружиной 12 приводные кулачки 13. На втулке 10 с возможностью враще ния установлена ведомая шестерня 14 с жестко закрепленными на ней кулачками 15, находящаяся в зацеплении с ведущей шестерней 16, приводимой от двигателя 17. В исходном положении приводные кулачки 13 взаимодействуют под действием пружины 12 с центральным упором 18 вала 9 и с кулачками 1 ведомой uieстерни. При работе механического привода включенным двигателем 17 крутящий момент от двигателя 17 через ведущую 16, ведомую 14 шестерни, кулачки 15, приводные кулачки 13 и втулку 10 пер дается на выходной вал 9. При работе механического привода с отключенным двигателем 17 крутящий момент от маховика 2 передается чере вал 3, кулачки 4 и штифт 5 подпружиненному элементу 7, который вначале перемещается поступательно, вступает в контакт с приводными кулачками 13, нижним конусным концом раздвигает эти кулачки 13 до вывода их из взаимодействия с кулачками 15, а затем подпружиненный элемент 7 начинает вращаться, кулачки 13 заскакивают в его пазы 8 и крутящий момент от маховика 2 через элемент 7, кулачки 13 и втулку 10 передается выходному валу 9. Предлагаемая конструкция отличается простотой изготовления и надеж- ностью работы. Формула изобретения Ручной дублер механического привода, содержащий маховик, связанный посредством кулачков с одним концом подпружиненного в осевом направлении элемента, ведущую и имеющую кулачки ведомую йюстерни, приводные кулачки, взаимодействующие с кулачками ведомой шестерни, и выходной вал с установленной на нем подвижно в окружном направлении относительно ведомой шестерни втулкой, имеющей радиальные пазы, отличающийся тем, что, с целью повышения надежности и упрощения конструкции, другой конец подпружиненного элемента выполнен конусным и паз, в радиальных пазах . втулки установлены и подпружинены к оси выходного вала приводные кулачки, взаимодействующие с пазами подпружиненного элемента при выходе из зацепления с кулачками ведомой шестерни. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 761778, кл. F 16 К 31/05, 1978 (прототип).
/7,
Фиг. 1
Б-Б
А-А
иг.2
п
л
/J
и.з
