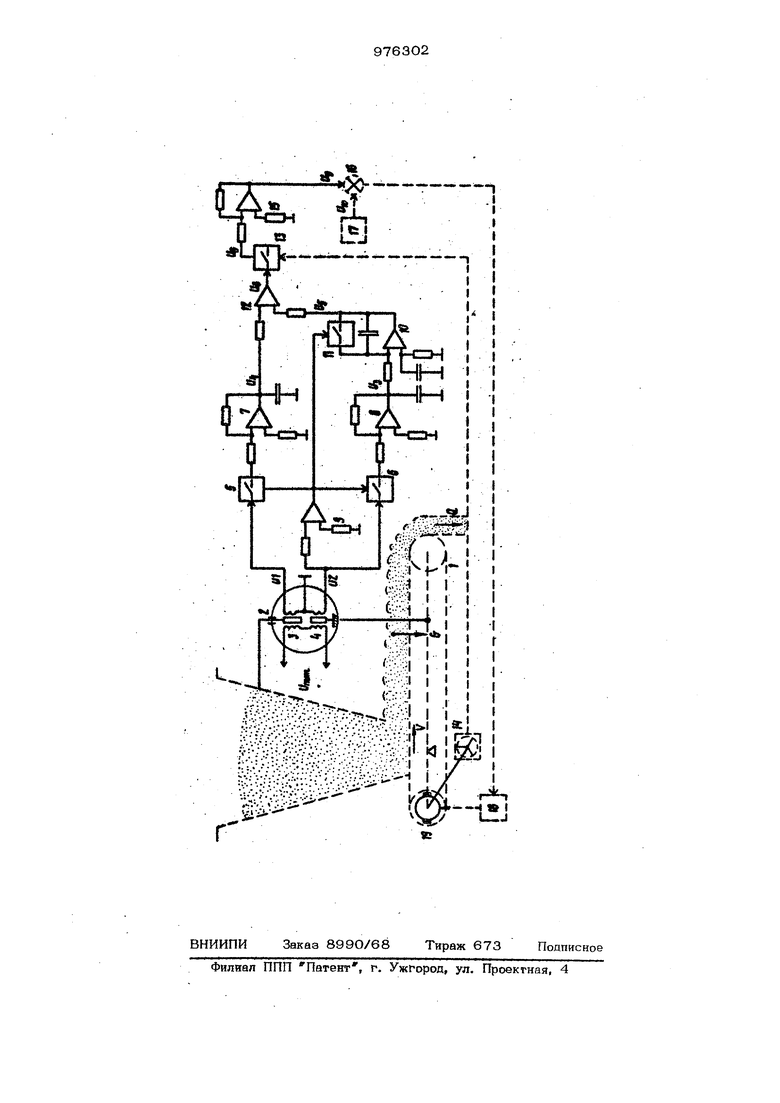
(54) МНОЖИТЕЛЬНО-ПРЕОБРАЗУЮЩЕЕ УСТРОЙСТВО Изобретение относится к весоизмерительной технике, Известна множительно-преобразуюншя система дозаторов СБ-Ш и СБ-106 1. В качестве силоюмерителя в эгой системе применяется динамометрическое кольцо со встроенным индуктивным датчиком, подключенным к входу вторичного прибора компенсационного типа. Выходным устройством этого прибора является реохорд, питаемый напряжением снимаемым с тахогенератора .привода пан ты. Таким образом, выполнение такой специфичной для дозаторов нецрерывного действия операции, как перемножение, осуществляется на контактном элементе, что является недостатком данного уст ройства. Наиболее близким к изобретению по технической сущности является мкожител но-преобразующее устройство весового дозатора, содержащее силоизмерительный элемент с двумя датчиками, один из коВЕСОВОГО ДОЗАТОРА торых ксадпенсашгонный, а второй - измерительный, управляемые ключи, операционные усилители и гахогенератор 2 . Недостатком известного устройства является сравнительно нрзкая точность измерения. Целью изобретения является повыщение точности юмерения. Поставленная цель достигается тем, что в него введен компаратор и нульорган, выход которого подключен к трем управляемым ключам, через первый из которых выход измерительного датчика через первый согласующий усилитель включен на первый вход компаратора, а через второй из которых выход компенсационного датчика через второй согласующий усилитель включен на вход операционного усилителя, включенного по схеме интегратора, цепь обратной связи которого защунтирована третьим управляемым. ключом, при этом выход операционного усилителя, включенного по схеме инте гратора, связан с вторым входом ком. 397 паратора, выход которого включен на управляющий вход четвертого управляемого ключа, второй вход которого связан с вы ходом тахогенератора, а выход - с выход ным усилителем. На чертеже приведена схема предлага емого устройства. Материал подается на ленту конвейера 1. Масса Q материала на ленте преобразуется динамометрическим кольцом 2 в перекрещение плунжера индуктивного датчика 3, Выходные напряжетм U.j датЬ Ика 3 и U2 датчика 4 с неподвижно .закрепленным плунжером через бесконтактные ключи 5 и 6 связаны соответственно с операционными усилителями 7 и 8. Управление ключами 5 и 6 произво дится нуль-органом 9, подключенным к выходу датчика 4. Выходное напряжение (Jo усилителя 8 подается на вход ин тегрирующего усилителя, 10, обратная связь которого шунтируется ключом 11, управляемым нуль-органом 9. Выходные напряжения U усилителя 7 и5 усилителя 10 подаются на входы компаратора12, выходное напряжение U, которо го определяет состояние бесконтактного кл ча13, на вход .которого подается напряжение ctfflMaeMoe с тахргенератора 14 Выходное напряжение Ug кгаоча 13 подается на операционный усилитель 15, Выход этого усилителя связан с элементом 16 рассогласования, на второй вход которого подключен задатчик 17. Разность Л выходного напряжения ,Ug усилителя 15 и напряжения U-to задания поступает на вход системы 18 автоматического управлетга, которая определяет частоту вращения регулируемого привода 19. М ножительно-преобразующее устройство работает спеауюттал образом. Выходное йапряжение ,U датчика 3 с подвиисным плунжером линейн зависит от хода плушкера, а тем самьш - от массы S материала на ленте, от напряжения шггания первичной обмотки и от«емпературы окружающей среды. Напряжет Ut2, снимаемое с датчика 4 с неподвижным плунжером, зависит только от напряжения шггания первичной обмотка в температуры окружающей cpeд Так. как конструктивные параметры обои датчиков одинаковы, то степень влияния на напряжения U температуры и напряжения питания одинакова. 2 Напряжения U и (J/ поступают через бесконтактньф ключи 5 и 6, на входы операционных.усилителей 7 и 8. Так.тшк ключи управляются нуль-органом 9, включенным на знакопеременное синусоидальное напряжение Uj, то ключи открыты только в одном полупериоде, и поэтому усилители 7 и 8 осуществляют линейное однопЬриодное выпрямление напряжений и и и. Выходное напряжение U усилителя 7 линейно зависит от величины массы Q, а также от напряжения питания и температуры. Точно таким же образом зависит от наррялсенин питания и температурыги выходное напряжение U, усилителя 8. Кроме того, напряжения U и U 3 4 зависят тадоке и от напряжения помехи в линиях связи от датчиков 3 и 4 к схеме. Так как обе линии связи прокладываются в одном кабеле, то помеха одинакова в обоих линиях связи и степень ее ВЛИЯНИЯ на напряжения Uj и и одна и та же. Напряжение Uj подается на вход интегрирующего операционного усилителя 10, обрат1тя связь которого шунт1фуется бесконтактным ключом 11, управляе мым нуль-органом 9. Поэтому выходное напряжение Uj усилителя 10 имеет пилообразную форуду кривой в тот период, когда ключ 11 разомкнут. Во второй полупериод напряжение 05 равно нулю . Амплитуда пилообразного напряжения зависит от величины питающего напряжения, температуры и напряжения помехи в линии связи. Напряжение Ug подается на один из входов компаратора 12, на второй вход которого поступает напряжение U4 На выходе компаратора напряжение U имеет импульсную форму, причем ширина импульса зависит только от величины перемещения плунжера датчика 3, так как .изменение напряжения питания, температуры и помехи, как следует из опи-сания схемы, компенсируется. Иными словами, выходное напряжение U компаратора 12 имеет широтно-импульсЕЫй характер модуляции, и ширина импульса зависит только от величины G массы материала. Напряжение U является управляющим для ключа 13, через который пропускается напряжение U-j, снимаемое с тахогенератора 14. Так как время открытия ключа линёйио зависит о,т массы Q, а подводимое к нему напряженке линейно зависит от величины скорости V ленты, то- выходное напряжение Ug ключа смодулировано как по ширине, так и jip амплитуде импульса, а среднее значение этого напряжения пропорционально произведению величин Q и V , т.е. пропорционально производительности Q дозатора. Напряжение Ug усиливается усвлителем 15 до величины Ug . Это напряжение подается на вход элемента 16 рассогласования, где выделяется разность & фактического Uj и заданного значения производительности.
Напряжение и далее подаетсяна вход системы регулирования, которая устана&ливает частоту вращения привода 19, а тем самым скорости V ленты, в зависимости от величины массы G.
Технико-экономическая эффективность пред/шгаемого изобретения определяется за счет повышения точности дозирования. Так при дозировании клинкера дозатором СБ-1О6, схема которого принята за аналог, погрешность составляла 2 + 5%. При дозировании клинкера предлагаемым . дозатором погрешность не превышала 1%. При этом производительность мельнии (выход готового продукта - демент) была увеличена на 3 т/ч, так как точная и равномерная загрузка мельниц клинкером исключила возможность получения цемента пониженного качества | более круп№1й помол) из-за перегрузки мельниц и при повышении производительности дозатора СБ-106 на 1-1,5%.
Формула изобре тения М ножительно-преобраз тощее устройство весового дозатора, содержащее силоизмерительный элемент с двумя датчиками, один из которых компенсационный, а другой - измерительный, управляемые ключи, операционные усилители и тахогенератор, отличающееся тем что, с целью повышения точности измерения, в него введен компаратор и нульорган, выход которого подключен к трем управляемым ключам, таерез первый из которых выход измерительного датчика через первый согласующий усилитель включен на.первый вход компаратора, а через второй из которых выход компенсационного дагчика через второй согласу ющий усилитель включен на ЕКОД операционного усилителя, включенного по схеме интегратора, цепь обратной связи которого зашунтирована третьим управляемым ключом, при этом выход операаионнот о усилителя, включенного по схеме интегратора, связан с вторым входом компаратора выход которого включен на управляющий вход четвертого управляемого ключа, второй вход которого связан с выходом тахогенератора, а выход с выходным усилителем.
Источники информации,
принятые во внимание при экспертизе
1, Авто яатизация и механизация производства, 1976, № 12, с. 17.
2.Конев Ю. И. Электронная техника в автоматике. М., Советское радио, 1977, с. 298 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического управления электродвигателем перемещения загрузочной машины | 1980 |
|
SU926486A1 |
| Весовой дозатор непрерывного действия | 1974 |
|
SU509791A1 |
| Следящая система | 1978 |
|
SU746406A1 |
| Следящая система | 1984 |
|
SU1216773A1 |
| Электропривод переменного тока с бесконтактным тахогенератором | 1986 |
|
SU1411912A2 |
| Следящая система | 1986 |
|
SU1376061A1 |
| Компенсационный стабилизатор напряжения с защитой | 1984 |
|
SU1273901A1 |
| Источник питания с бестрансформаторным входом | 1987 |
|
SU1429253A1 |
| Устройство для управления вращением шпинделя балансировочного станка | 1988 |
|
SU1610339A1 |
| Устройство регулирования скорости электродвигателя | 1983 |
|
SU1125600A1 |