со sj
О5 О 05
Изобретение относится к станкостроению и астротехнике и может найти широкое применение в металлорежущих станках, и при управлении оптическими и радиотелескопами.
Цель изобретения - повьааение точности, системы.
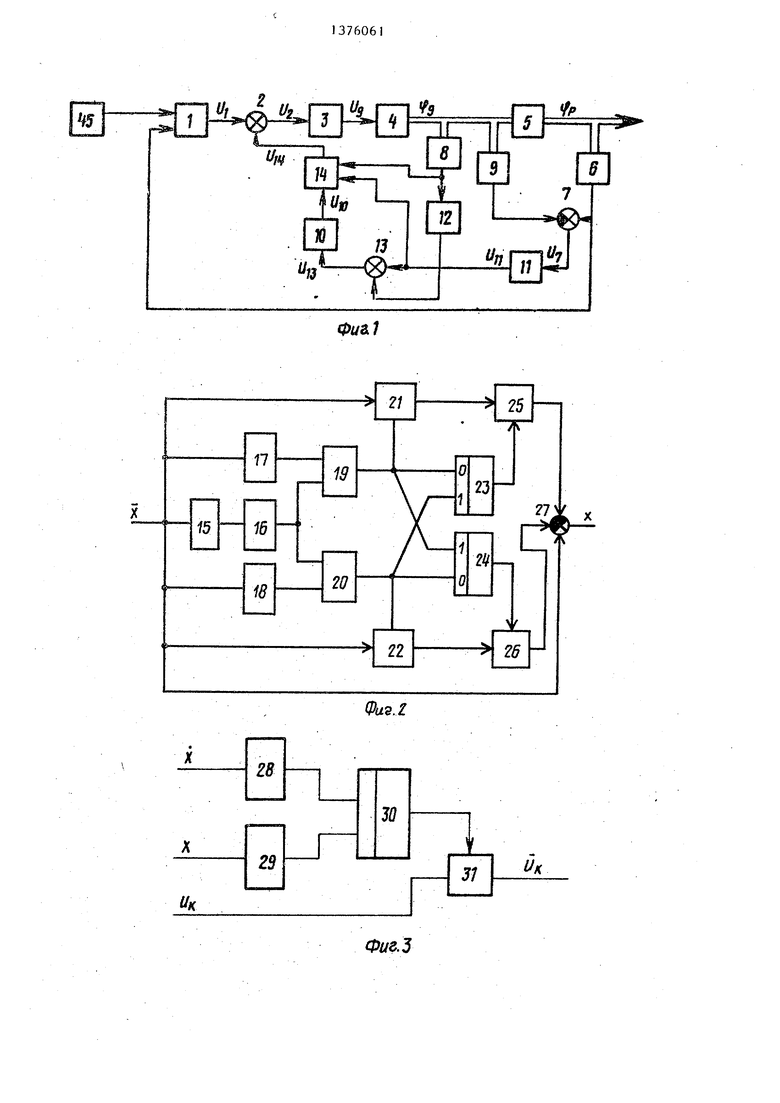
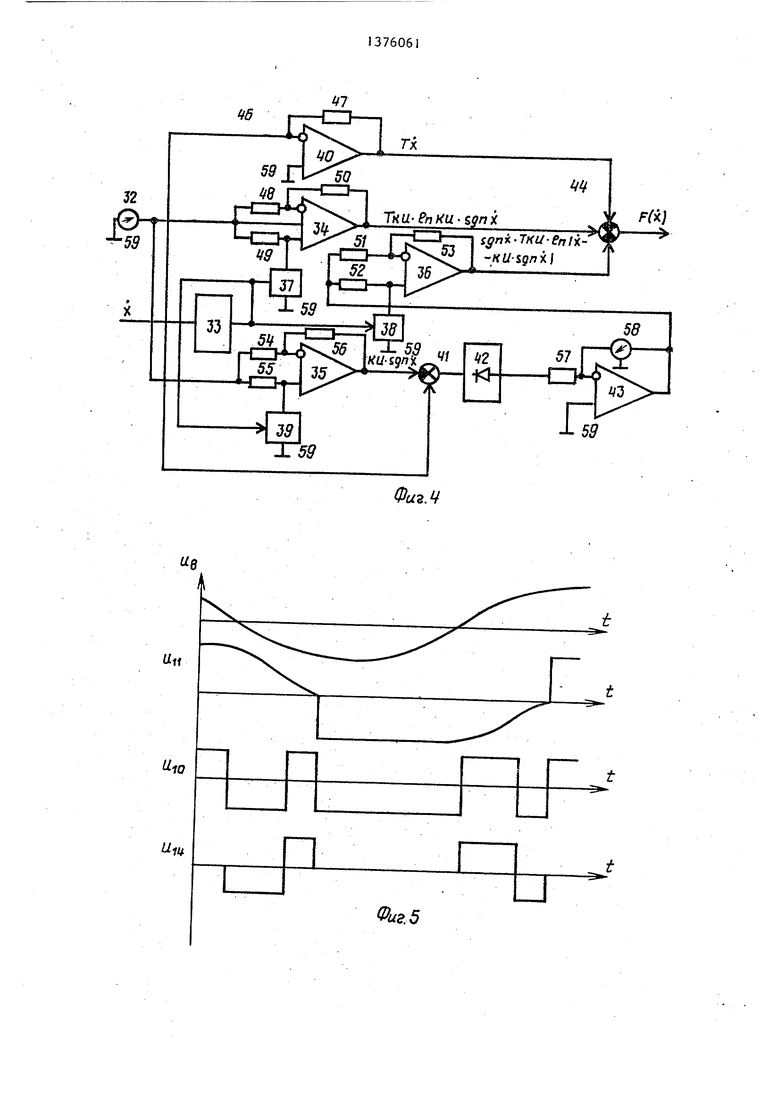
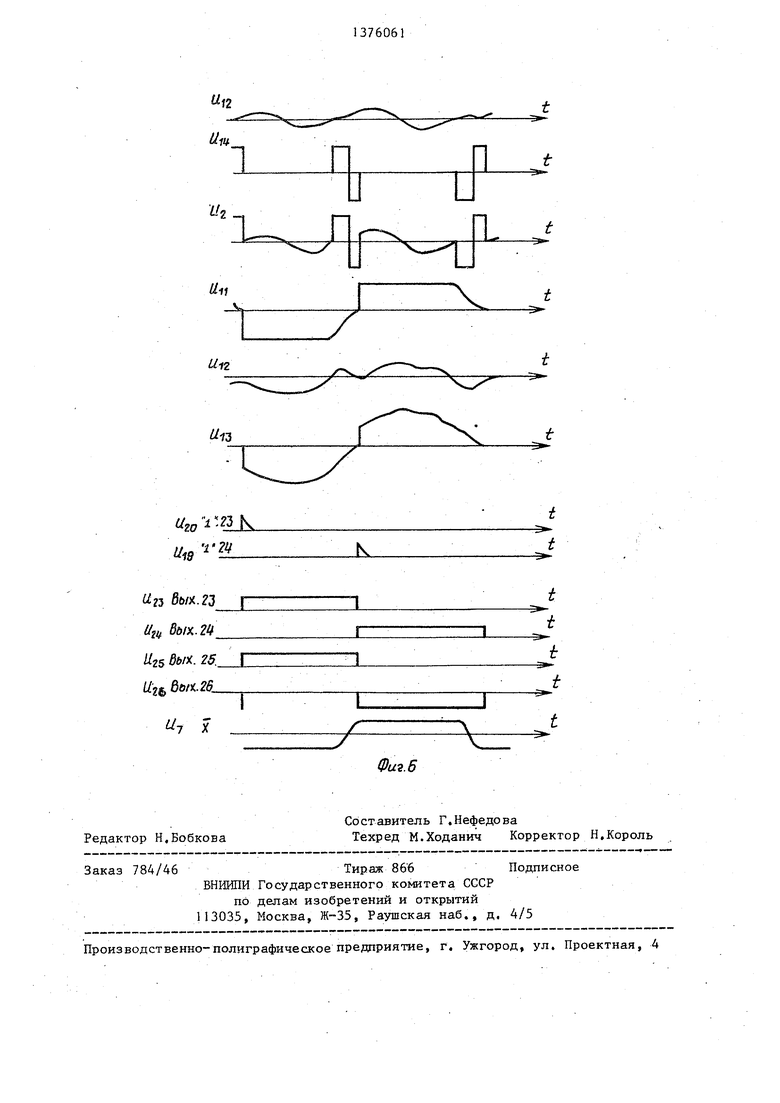
На фиг.1 приведена функциональная схема системы; на,фиг.2 - функциональная схема блока определения вели чены люфт.а; на фиг.З - функциональная схема формирователя ( сигнала. компенсации; на фиг.4 - принципиальная электрическая схема функционального блока; на фиг.5 и 6 - эпюры напряжет НИИ поясняющие работу системы.
Система содержит регулирующий блок Г, сумматор 2, усилитель 3 мощности, исполнительный двигатель 4, редуктор 5, второй датчик 6 положения, сумматор 7, датчик 8 скорости, первый датчик 9 положения, релейный блок 10, блок 11 определения величины люфта, функциональный преобразо- ватель 12, сумматор 13, формирова- тель 14 сигнала компенсации, дифференциатор 15, фиксатор 16 нуля, компараторы 17 и 18, элементы И 19 и 20, блоки 21 и 22 памяти, триггеры 23 и 24, ключи 25 и 26, сумматор 27, фиксаторы 28 и 29 нуля, триггер 30, ключ 31, источник 32 постоянного напряжения, компаратор 33, операционные усилители 34-36, .ключи 37-39, операционный усилитель 40, сумматор 41, детектор 42, операционный усилитель 43, сумматор 44, задатчик 45, резисторы 46-57, транзистор 58, общую щину 59 системы. Кроме того, обозначены и, - выходной сигнал i-ro блока или элемента, . и - углы поворота валов двигателя 4 и редуктора 5, t - время.
Компаратор 17 реализует функцию П при Uav -70;
и {
о при Ug.O. Компаратор 18 реализует функцию Г1 при и ах О
и
8ЫХ
,0 при U-5 -7/ 0, Фиксаторы 16, 28 и 29 нуля зуют функцию
О при Uj, 0;
и
бых
1 при to при и вх 0.
В качестве триггеров 23, 24 и 30 применяются универсальные 1К-триг- геры,
Система работает следующим образом.
В статическом состоянии выставляются нули датчиков 6 и 9 положения, при этом нуль второго датчика
9 положения согласуется с нулем первого датчика 6 положения и устанавливается по середине зоны редуктора 5. Для наглядности предположим, что система находится в нулевом положеНИИ, т.е. выходньте сигналы датчика 6 положения и датчика 8 скорости равны нулю.
На выходе регулирующего блока 1 по соответствующему закону формируется сигнал управления U, и поступа-, ет на первый сумматор 2. На выходе формирователя 14 сигнала компенсации формируется сигнал , следовательно, выходной сигнал сумматора 2
и, и,.
Под действием этого сигнала выбирается люфт редуктора 5. Как только происходит зацепление вала исполнительного двигателя 4 и вала редуктора 5, т.е. люфт выбирается, скорости их вращения становятся равными. На выходе дифференциатора 15 блока 11 определения величины люфта появляется нулевой сигнал. По. этому сигналу с иксатор 16 нуля переходит из нулевого состояния в единичное. При этом на выходе второго сумматора 7 сигнал U равен половине величины люфта (пусть и 7 7 о J. Он поступает в
блок 11 определения величины люфта. По сигналу и -, О компаратор 17 перебрасывается из нулевого состояния в единичное и срабатывает элемент И 19, сигнал на выходе которого стробирует запись отработанной величины Л1офта в блок 21 памяти. Одновременно этот же сигнал перебрасывает триггер 24 в единичное состояние, сигнал которого включает ключ 26,
подсоединяющий блок 22 памяти к сумматору 27. Однако при первом проходе люфта в блоке 22 памяти записан ноль. Под действием сигнала U., U регулирующего блока 1 система отрабатьшает выходной сигнал задатчик а 45.
При изменении направления вращения вала исполнительного двигателя 4 возникает необходимость быстрой
выборки люфта. При этоМ сигнал Uj датчика 8 скорости равен нулю. По этоку сигналу перебрасывается из нулевого состояния в единичное фикса- тор 28 нуля формирователя 14 сигнала компенсации. Выходной сигнал фикса- .тора 28 нуля перебрасывает триггер 30 в единичное состояние. При этом триггер 30 включает ключ 31, подклю- чающий к первому сумматору 2 сигнал оптимальной компенсации люфта U , равный +и„йкс или -и, в зависимости от знака выходного сигнала U блока 11 определения величины люфта. Сигнал компенсации U, величины люфта выбирается равным сигналу насыщения усилителя 3 мощности, тогда подача такого сигнала приводит к насыщению последнего, поэтому прибавле- ние к сигналу компенсации U, сигнала Ъ регулирующего блока 1 не изменяет оптимального по быстродействию закона движения исполнительного двигателя 4. Коэффициент усилителя 3 мощности определяется законом управления, реализованным в регулирующем блоке 1.
Алгоритм оптимальной по быстродействию компенсации люфта определя- ется характеристикой релейного блока 10, реализукнцего функцию
+U
при и,, 0;
-UMCIKC при и,,0. Для исполнительного двигателя 4 постоянного тока с независимым возбуждением, при известных допущениях, обычно описываемого уравнением вида
Т, (f ,,
где Т,К4- постоянная времени и коэффициент усиления исполнительного двигателя 4, а регулирующее воздействие IUiUU,onc функция переключения U,, имеет вид
. и,, + FlUg), где F(Ug) +sgn{UgT,K4n|Ug- K4U51 SgnlUgl - Sgn Ug X
X
Ug - выходной сигнал датчика 8
скорости;
Ujj - выходной сигнал источника 32 постоянного напряжения функционального преобразователя 12.
Функция F(Uj) реализуется в функциональном преобразователе 12, один из возможных примеров конструктивно
0
5
Q
0
5
го выполнения которого приведен на фиг. 4.
По окончании оптимальной по быстродействию отработки величины люфта, определяемой сигналом U,, блока 1 I определения величины люфта, т.е. при и,, 0, перебрасывается из нулевого состояния в единичное фиксатор 29 нуля формирователя 14 сигнала компенсации. По этому сигналу триггер 30 переключается в нулевое состояние, его выходной сигнал размыкает ключ 31, отключая сигнал компенсации U. При втором проходе люфта сигнал U, равен половине величины люфта. Вторая половина люфта при U О выбирается системой под действием сигнала и, регулирующего блока 1, т.е. не оптимально. Как только люфт выберется и скорости вала исполнительного двигателя 4 и вала редуктора 5 сравняются, на выходе дифференциатора 15 блока I1 определения величины люфта появляется нулевой сигнал. По этому сигналу последовательно срабатывает фиксатор 16 нуля, элемент И 20 пе- - реключает в единичное состояние тригг гер 23 и в нулевое триггер 24, блок 22 памяти запоминает половину величины люфта при и, ; 0. Выходной сигнал триггера .23 замыкает ключ 25 и через него на сумматор 27 поступает сигнал с выхода блока 21 памяти, равный половине величины люфта при U-, 0. Одновременно на сумматор 27 поступает сигнал U-, с выхода сумматора 7. Таким рбразом, на вькоде сумматора 27 мируется сигнал, равный реальной (т.е. измеренной) величине люфта. Теперь при очередном изменении направления вращения вала; исполнительного двигателя 4 вся зона люфта, определяемая сигналом Uii блока 1 1 определения величины люфта, выбирается оптимально по быстродействию. По окончании отработки люфта в блоке 11 определения величины люфта происходит перезапись вновь измеренной половины люфта при U -, О в блок 2 1 памяти, а на выходе блока 11 опреде-г ления величины люфта сформируется сигнал I) , , равный измеренной величине люфта,, на основании которого осуществлена оптимальная компенсация люфта. Таким образом, в системе после отработки первого полупериода сигнала задания . осуществляется оптимальная по быстродействию ком-.
513
пенсация нзмеретют о -люфта редуктора 5, а процесс не оптимальной выборки люфта, связанный с формированием (измерением) величины люфта в блоке 11 определения величины люфта, можно назвать переходным процессом контура компенсации люфта данной системы.
На функциональной схеме системы (фиг.1) не предусмотрено специальных связей и сигналов, обеспечивающих установку всех триггеров в исходное состояние. Триггеры 23 и 24, используемые в системе,., устанавливаются в исходное состояз-ше после включения питания случайным образом. В началь- ный момент после включения в блоках 2 и 22 памяти записан О, поэтому их сигналы не изменяют выходного сигнала блока 11 определения величины люфта, э следовательно, не важно, состояние триггеров 23 и 24, управляющих подключением выходов блоков 2 I и 22 памяти к выходу блока 1 1 определения величины люфта. В этом случае сигнал U,., U-, и, если триггер 30 находится в единичном состоянии, то контур компенсации люфта в данной системе выбирает рассогласовап- ние, равное- U., , под действием сиг- нала И оптимально по быстродействию, приводя систему в согласованное состояние, при котором разность показаний датчиков 6 и 9 положения равна нулю. Далее в системе осуществляется несколько проходов люфта, связанных с определением величины люфта в блоке 1 определения величины люфта, т.е. переходной процесс контура компенсации люфта в системе. Если триггер 30 после включения питания находится в нулевом состоянии j то переходной процесс в системе начинается при , где А - разность показаний датчиков 6 и 9 положений, но порядок функционирования cиcтe ы во время переходного процесса остается тот же.
Рассмотрим порядок функционирования системы при изменении величины люфта в процессе -работы. Пусть величина люфта уменьшилась, тогда в конце отработки люфта сигная U, 0. В этом случае, так как сигнал Ug 0, срабатьгоает компаратор и один из элементов И 19 или 20 для однозначности положим, что сработает элемент И 19). По сигналу этого элемента переключается в единичное состояние
0 5 о Q с
5
0
16
триггер 24 и в нулевое триггер 23. Блок 21 памяти запоминает новое (измеренное) значение люфта. Триггер 23 размыкает ключ 25, а триггер 24 замыкает ключ 26, подключающий блок 22 памяти к сумматору 27. На выходе последнего формируется значение люфта и, так как формирователь 14 сигнала компенсации не отключил сигнал компенсации и,4 от сумматора 2, система выбирает люфт оптимально по быстродействию. По окончании отработки люфта по сигналу U.,, 0 формирователь 14 сигнала компенсации отклЕочает сигнал компенсации U , , и система приходит в первоначальное, для. рассматриваемого такта компенсации люфта, положение. Далее люфт выбирается под действием сигнала U;, регулирующего блока 1, т.е. не оптимально. В конце выборки люфта по сигналу U.0
о
в блоке 22 памяти записывается новое значение люфта, соответствующее уменьшенной величине люфта.
Таким образом, при изменении величины люфта в системе имеет место переходной процесс, связанный с изменением и формированием новой величины люфта, заключающейся в двойном проходе исполнительным двигателем 4 зоны люфта: один раз оптимально по быстродействию и один раз не оптимально.
Если в системе при очередном проходе произошло увеличение величины люфта на величину dU,., , то в этом случае в системе также имеет место переходной процесс, в ходе которого формируется новое значение величины люфта, заключающийся в не оптимальной по быстродействию отработке величины люфта, равной ли.,., .
Однако следует отметить, что изменение люфта в редукторе 5 системы происходит с существенно меньшей частотой, чем частота задающего сигнала , при этом в основное время в системе осуществляется олтимальная. по быстродействию компенсация люфта, что позволяет в системе с люфтом получить более высокую точность отработки задающего сигнала .
В качестве блоков 21 и 22 памяти можно использовать микросхему.
Предлагаемая система позволяет отслеживать преимущественно знакопеременные задающие сигналы. Применение оптимальной по быстродействию
713
ко тенсации люфта редуктора 5 дает возможность в установившемся режиме компенсации люфта исключить удар в редукторе 5 системы, что позволяет повысить ее надежность и долговечность. При этом время отработки величины люфта минимально возможное. Следовательно, при таком щадящем для редуктора 5 режиме выборки люфта минимальна и ошибка, обусловленная наличием люфта.
Таким образом, по сравнению с известной предлагаемая система обеспечивает более высокую точность отра- ботки задающего сигнала при лучших эксплуатационных характеристиках, при этом точность повышается приблизительно на 30%, а долговечность редуктора на 50%,
Формула изобретения
1, Следящая система, содержащая релейный блок, последовательно со- единенные датчик скорости и функциональный преобразователь, а также ; задатчик, подключенный выходом.к первому входу регулирующего блока, соединенный выходом.с первым входом первого сумматора, подключенного выходом через усилитель мощности к входу исполнительного двигателя, вал которого кинематически связан с валом первого датчика положения и входным валом редуктора, выходной вал которого кинематически связан с валом второго датчика положения, соединенного выходом с первым входом второго сумматора, подключенного вторым входом к выходу первого датчика положения, а выходом через блок определения величины люфта - к первому входу третьего сумматора, отличающаяся тем, что, с целью повышения точности системы, в ней дополнительно установлен формирователь сигнала компенсации, подключенный выходом к второму входу первого сумматор первым входом - к выходу датчика скорости, вторым входом - к выходу блока определения величины люфта, а третьим входом - к выходу релейного
0
5 о д
5
5
0
8
блока, соединенного входом с выходом третьего- сумматора, подключенного вторым входом к выходу функционального преобразователя, вал датчика скорости кинематически связан с валом исполнительного двигателя,
2,Система поп,1, отличающаяся тем, что блок определения величины люфта содержит дифференциатор, подключенный входом к информационным входам первого и второго блоков памяти, к первому входу сумматора и к входам первого и второго компараторов, а выходом - к входу фиксатора нуля, соединенного выходом с первыми входами первого и второго элементов И, подключенных вторыми входами к вькодам соответственно первого и второго компараторов, выход первого элемента И соединен с управляющим входом первого блока .памяти,
с инверсным входом первого триггера и с прямым входом второго триггера, выход второго элемента И соеданен с управляющим входом второго блока памяти, с прямым входом первого триггера и с инверсным входом второго триггера, подключенного .выходом к : управляющему входу первого ключа, соединенного информационным входом с выходом второго блока памяти, а выходом - к вторым входам сумматора, подключенного третьим входом к выходу второго ключа, соединенного информационным входом с выходом первого блока памяти, а управляющим входом - с выходом первого триггера, причем вход дифференциатора и выход сумматора являются входом и выходом блока,
3,Система по п,1, о т л и ч а ю- щ а я с я тем, что формирователь сигнала компенсации содержит триггер, соединенньш прямым и инверсным входами с выходами соответственно первого
и второго фиксаторов нуля, а выходом- с управлякщим входом ключа, причем входы первого и второго фиксаторов нуля, информационный вход и выход ключа являются соответственно, первым, вторым и третьим входами и вы- ходом формирователя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий электропривод с компенсацией люфта | 1980 |
|
SU964574A1 |
| Следящий электропривод с компенсацией люфта | 1981 |
|
SU981929A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2154295C1 |
| СПОСОБ УПРАВЛЕНИЯ ВИНТОВЫМ МЕХАНИЗМОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2013798C1 |
| Система автоматического управления телескопом | 1980 |
|
SU974334A1 |
| Следящий электропривод редукторных механизмов с компенсацией люфта | 1986 |
|
SU1388825A1 |
| Следящая система | 1989 |
|
SU1732329A1 |
| Нелинейное корректирующее устройство | 1984 |
|
SU1226403A2 |
| Следящий привод для компенсации ки-НЕМАТичЕСКиХ пОгРЕшНОСТЕй МЕХАНизМОВ | 1979 |
|
SU817959A1 |
| Следящая система | 1983 |
|
SU1166056A2 |
Изобретение относится к станкостроению и ветротехнике и может найти широкое применение в металлорежущих станках и при управлении оптическими и радиотелескопами. Целью изобретения является повьшение точности системы. Для этого в системе измеряются скорость двигатедя и положения валов двигателя и- редуктора. Положения валов сравниваются, и на основании результата сравнения формируется информация о величине люфта редуктора. Сигнал, пропорциональный скорости, функционально преобразуется и суммируется с сигналом, пропорциональным величине люфта. Из суммарного сигнала формируется релей ная функция переключения. В зависимости от скорости, величинь: люфта и функции переключения форм1фуется KOtf пенсирующий сигнал, который подается на вход усилителя мощности дополни- .тельно к сигналу регулирующего блока. 2 з.п. , 6 ил. S W
Фи&1
Фа.2
31
UK
Фие.З
46
Тхи-en Ки 5ffnX
sgnf- THU-enli- j
F)
58
57
ФаъМ
Ul2
tin
иг
«If
/
Un
73
JL
V
| Следящий привод | 1977 |
|
SU857924A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Следящая система | 1975 |
|
SU559220A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Следящая система | 1975 |
|
SU742871A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
